如何使用ROS的service读取Kinect图像
如何使用ROS的service读取Kinect图像
我们经常会使用各种ROS包,而如何在ROS程序中导入Kinect图像呢?
1.先写一个service文件
学了挺久了,这个还没有好好整理过。其实步骤很简单:
先在工作空间下创建一个ros package。
$ catkin_create_pkg kinect_srv roscpp rospy std_msgs message_generation sensor_msgs然后在这个包下,新建一个srv文件夹,并建立srv文件。
$ mkdir srv $ gedit rgbd_image.srv在srv文件里填写自己需要的srv形式。我需要一个输入一个call信号,就可以输出rgb和depth图像的srv。
bool start --- sensor_msgs/Image rgb_image sensor_msgs/Image depth_image- 增添以下内容到package.xml里
message_generation
message_runtime
- 修改CMakelists.txt
cmake_minimum_required(VERSION 2.8.3)
project(kinect_srv)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
sensor_msgs
)
add_service_files(
FILES
# Service1.srv
# Service2.srv
rgbd_image.srv
)
generate_messages(
DEPENDENCIES
sensor_msgs
std_msgs
)
catkin_package(
CATKIN_DEPENDS message_runtime
)
include_directories(
${catkin_INCLUDE_DIRS}
)到这里就可以使用编译了
$ catkin_make如果一切正确,应该在工作空间的devel/include/kinect_srv文件下找到rgbd_image.h文件。这个会在后面引用。
2.发布Service
在工作空间下再建一个包
$ catkin_create_pkg kinect_driver roscpp rospy std_msgs sensor_msgs cv_bridge image_transport在src中新建一个get_image.cpp文件,开始设定service内容。
#include "kinect_driver/common_include.h" //这里面是opencv和ros的头文件
#include "kinect_srv/rgbd_image.h"
using namespace std;
using namespace cv;
sensor_msgs::Image rgb_image;
sensor_msgs::Image depth_image;
class ImageConverter
{
ros::NodeHandle nh_;
image_transport::ImageTransport it_;
image_transport::Subscriber image_sub_rgb;
image_transport::Subscriber image_sub_depth;
//image_transport::Subscriber image_sub_point;
public:
ImageConverter()
: it_(nh_)
{
// Subscrive to input video feed and publish output video feed
image_sub_rgb = it_.subscribe("/camera/rgb/image_rect_color", 1, &ImageConverter::imageCb_rgb, this);
image_sub_depth = it_.subscribe("/camera/depth_registered/image_raw", 1, &ImageConverter::imageCb_depth, this);
//image_sub_point = it_.subscribe("/camera/depth_registered/points", 1, &ImageConverter::imageCb_depth, this);
///camera/depth_registered/points
}
~ImageConverter()
{
}
void imageCb_rgb(const sensor_msgs::ImageConstPtr& msg)
{
rgb_image = *msg;
}
void imageCb_depth(const sensor_msgs::ImageConstPtr& msg)
{
depth_image = *msg;
}
};
bool get_image(kinect_srv::rgbd_image::Request &req,kinect_srv::rgbd_image::Response &res)
{
if (req.start)
{
res.rgb_image = rgb_image;
res.depth_image = depth_image;
}
ROS_INFO("success");
return true;
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "get_image");
ImageConverter ic;
ros::NodeHandle n;
ros::ServiceServer service = n.advertiseService("get_image", get_image);
ros::Rate loop_rate(200);
while (ros::ok())
{
ros::spinOnce();
loop_rate.sleep();
}
ros::spin();
return 0;
}为了方便,我们可以再写一个launch文件快速启动。(使用了openni2的驱动)
<launch>
<include file="$(find openni2_launch)/launch/openni2.launch" />
<node pkg="kinect_driver" type="get_image" name="get_image"/>
launch>3.使用Service
为了检测我们能否读到rgbd图像,我们再写一个显示程序。
#include "kinect_driver/common_include.h"
#include "kinect_srv/rgbd_image.h"
using namespace std;
using namespace cv;
int main(int argc, char** argv)
{
ros::init(argc, argv, "show_image");
ros::NodeHandle nh;
ros::ServiceClient client = nh.serviceClient<kinect_srv::rgbd_image>("get_image");
kinect_srv::rgbd_image srv;
srv.request.start = true;
sensor_msgs::Image msg_rgb;
sensor_msgs::Image msg_depth;
ros::Rate loop_rate(200);
Mat rgb_image;
Mat depth_image;
while (ros::ok())
{
if (client.call(srv))
{
try
{
msg_rgb = srv.response.rgb_image;
msg_depth = srv.response.depth_image;
rgb_image = cv_bridge::toCvCopy(msg_rgb, sensor_msgs::image_encodings::TYPE_8UC3)->image;
depth_image = cv_bridge::toCvCopy(msg_depth, sensor_msgs::image_encodings::TYPE_32FC1)->image;
//normalize(depth_image,tmp,255,0,NORM_MINMAX);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
return 1;
}
IplImage ipl_rgb_image = rgb_image;
cvConvertImage(&ipl_rgb_image , &ipl_rgb_image , CV_CVTIMG_SWAP_RB);
imshow("rgb",rgb_image);
imshow("depth",depth_image);
waitKey(1);
}
}
}这里的大循环中,我们每call一次,接受到一次rgb和depth图像。
最后写这个包的CMakeLists.txt
cmake_minimum_required(VERSION 2.8.3)
project(kinect_driver)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
###########
## Build ##
###########
#ros
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
sensor_msgs
cv_bridge
image_transport
)
catkin_package()
include_directories(${catkin_INCLUDE_DIRS})
#opencv
find_package(OpenCV 3 REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
link_directories(${OpenCV_LIBRARY_DIR})
#pcl
find_package(PCL REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
#self files
include_directories("~/XXX/devel/include")
include_directories(include)
#############
## execute ##
#############
#get_image
add_executable(get_image src/get_image.cpp)
target_link_libraries(get_image
${catkin_LIBRARIES}
${OpenCV_LIBS}
${PCL_LIBRARIES}
)
#show_image
add_executable(show_image src/show_image.cpp)
target_link_libraries(show_image
${catkin_LIBRARIES}
${OpenCV_LIBS}
${PCL_LIBRARIES}
)到这里就全部完成了。
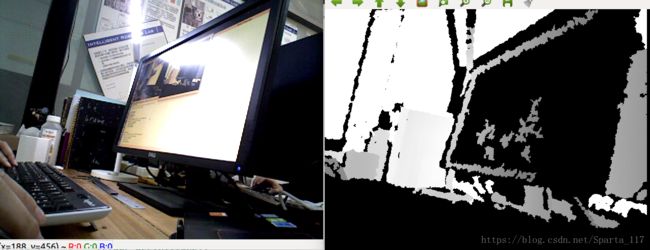
4.检测结果
打开一个终端进入工作空间运行:
$ source devel/setup.bash
$ roslaunch kinect_driver kinect_driver.launch再打开另外一个终端入工作空间,输入:
$ rosrun kinect_driver show_image即可显示