《算法图解》学习笔记(六):图和广度优先搜索(附代码)
python学习之路 - 从入门到精通到大师
文章目录
- [python学习之路 - 从入门到精通到大师](https://blog.csdn.net/TeFuirnever/article/details/90017382)
- 一、图简介
- 二、图是什么
- 三、广度优先搜索
- 1)查找最短路径
- 2)队列
- 四、实现图
- 五、实现算法
- 六、运行时间
- 七、小结
- 参考文章
一、图简介
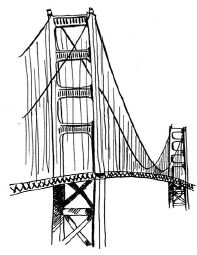
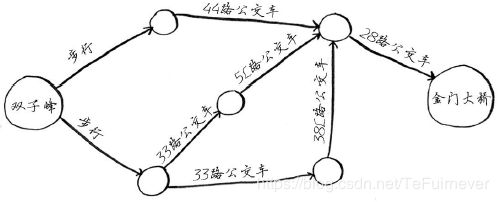
假设你居住在旧金山,要从双子峰前往金门大桥。你想乘公交车前往,并希望换乘最少。可乘坐的公交车如下:
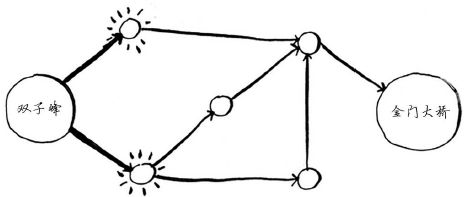
为找出换乘最少的乘车路线,你将使用什么样的算法?一步就能到达金门大桥吗?下面突出了所有一步就能到达的地方。
金门大桥未突出,因此一步无法到达那里。两步能吗?
金门大桥也未突出,因此两步也到不了。三步呢?
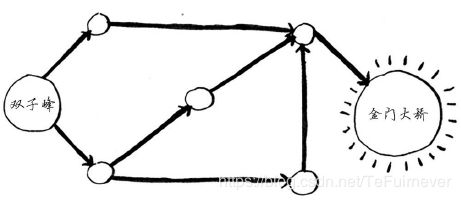
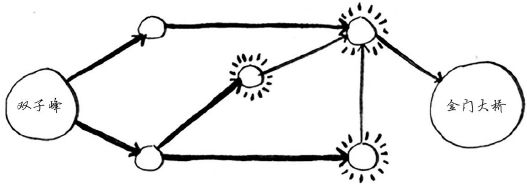
金门大桥突出了!因此从双子峰出发,可沿下面的路线三步到达金门大桥。
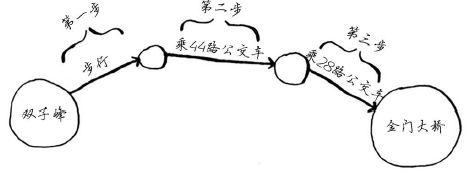
还有其他前往金门大桥的路线,但它们更远(需要四步)。这个算法发现,前往金门大桥的最短路径需要三步。这种问题被称为 最短路径问题(shorterst-path problem)。你经常要找出最短路径,这可能是前往朋友家的最短路径,也可能是国际象棋中把对方将死的最少步数。解决最短路径问题的算法被称为广度优先搜索。
要确定如何从双子峰前往金门大桥,需要两个步骤。
- 使用图来建立问题模型。
- 使用广度优先搜索解决问题。
二、图是什么
图模拟一组连接。
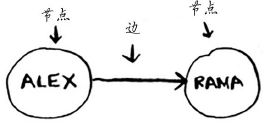
例如,假设你与朋友玩牌,并要模拟谁欠谁钱,可像下面这样指出 Alex 欠 Rama 钱。
完整的欠钱图可能类似于下面这样。
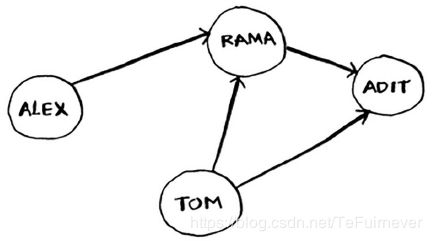
Alex 欠 Rama 钱,Tom 欠 Adit 钱,等等。图由节点(node)和边(edge)组成。
就这么简单!图由节点和边组成。一个节点可能与众多节点直接相连,这些节点被称为邻居。在前面的欠钱图中,Rama 是 Alex 的邻居。Adit 不是 Alex 的邻居,因为他们不直接相连。但 Adit 既是 Rama 的邻居,又是 Tom 的邻居。图用于模拟不同的东西是如何相连的。
三、广度优先搜索
介绍第一种图算法——广度优先搜索(breadth-first search,BFS)。在第1章我们介绍了一种查找算法——二分查找(《算法图解》学习笔记(一):二分查找(附代码))。广度优先搜索是一种用于图的查找算法,可帮助回答两类问题。
- 第一类问题:从节点A出发,有前往节点B的路径吗?
- 第二类问题:从节点A出发,前往节点B的哪条路径最短?
广度优先搜索让你能够找出两样东西之间的最短距离,不过最短距离的含义有很多!使用广度优先搜索可以:
- 编写国际跳棋AI,计算最少走多少步就可获胜;
- 编写拼写检查器,计算最少编辑多少个地方就可将错拼的单词改成正确的单词,如将READED改为READER需要编辑一个地方;
- 根据你的人际关系网络找到关系最近的医生。
还有很多,这里就不一一列举了。
前面计算从双子峰前往金门大桥的最短路径时,你使用过广度优先搜索。这个问题属于第二类问题:哪条路径最短?下面来详细地研究这个算法,你将使用它来回答第一类问题:有路径吗?

假设你经营着一个芒果农场,需要寻找芒果销售商,以便将芒果卖给他。在Facebook,你与芒果销售商有联系吗?为此,你可在朋友中查找。
这种查找很简单。首先,创建一个朋友名单。
然后,依次检查名单中的每个人,看看他是否是芒果销售商。
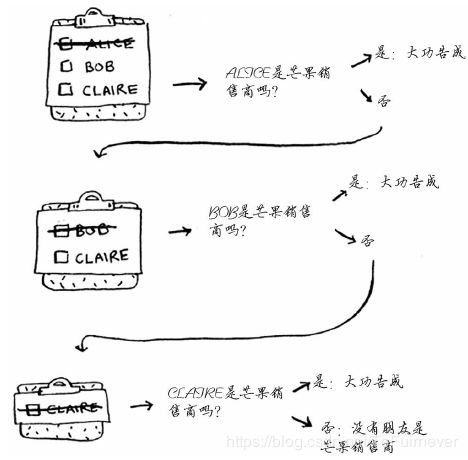
假设你没有朋友是芒果销售商,那么你就必须在朋友的朋友中查找。

检查名单中的每个人时,你都将其朋友加入名单。

这样一来,你不仅在朋友中查找,还在朋友的朋友中查找。别忘了,你的目标是在你的人际关系网中找到一位芒果销售商。因此,如果 Alice 不是芒果销售商,就将其朋友也加入到名单中。这意味着你将在她的朋友、朋友的朋友等中查找。使用这种算法将搜遍你的整个人际关系网,直到找到芒果销售商。这就是 广度优先搜索算法。
1)查找最短路径
再说一次,广度优先搜索可回答两类问题。
- 第一类问题:从节点A出发,有前往节点B的路径吗?(在你的人际关系网中,有芒果销售商吗?)
- 第二类问题:从节点A出发,前往节点B的哪条路径最短?(哪个芒果销售商与你的关系最近?)
刚才你看到了如何回答第一类问题,下面来尝试回答第二类问题——谁是关系最近的芒果销售商。例如,朋友是一度关系,朋友的朋友是二度关系。
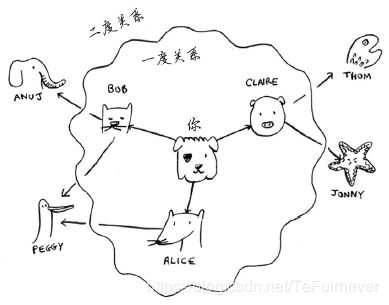
在你看来,一度关系胜过二度关系,二度关系胜过三度关系,以此类推。因此,你应先在一度关系中搜索,确定其中没有芒果销售商后,才在二度关系中搜索。广度优先搜索就是这样做的!在广度优先搜索的执行过程中,搜索范围从起点开始逐渐向外延伸,即先检查一度关系,再检查二度关系。顺便问一句:将先检查 Claire 还是 Anuj 呢?Claire 是一度关系,而Anuj是二度关系,因此将先检查 Claire,后检查 Anuj。
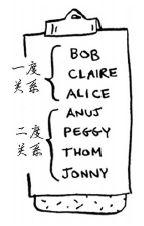
你也可以这样看,一度关系在二度关系之前加入查找名单。
你按顺序依次检查名单中的每个人,看看他是否是芒果销售商。这将先在一度关系中查找,再在二度关系中查找,因此找到的是关系最近的芒果销售商。广度优先搜索不仅查找从A到B的路径,而且找到的是最短的路径。
注意,只有按添加顺序查找时,才能实现这样的目的。换句话说,如果 Claire 先于 Anuj 加入名单,就需要先检查Claire,再检查 Anuj。如果 Claire 和 Anuj 都是芒果销售商,而你先检查 Anuj 再检查 Claire,结果将如何呢?找到的芒果销售商并非是与你关系最近的,因为 Anuj 是你朋友的朋友,而 Claire 是你的朋友。因此,你需要按添加顺序进行检查。有一个可实现这种目的的数据结构,那就是 队列(queue)。
2)队列
队列的工作原理与现实生活中的队列完全相同。

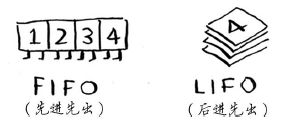
假设你与朋友一起在公交车站排队,如果你排在他前面,你将先上车。队列的工作原理与此相同。队列类似于栈,你不能随机地访问队列中的元素。队列只支持两种操作:入队和出队。
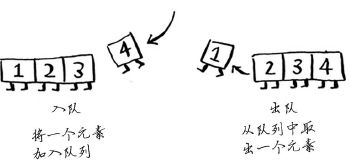
如果你将两个元素加入队列,先加入的元素将在后加入的元素之前出队。因此,你可使用队列来表示查找名单!这样,先加入的人将先出队并先被检查。
队列是一种 先进先出(First In First Out,FIFO) 的数据结构,而栈是一种 后进先出(Last InFirst Out,LIFO) 的数据结构。
四、实现图
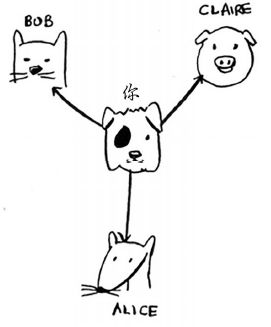
首先,需要使用代码来实现图。图由多个节点组成。
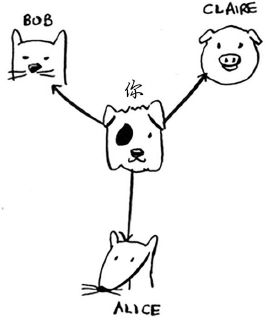
每个节点都与邻近节点相连,如果表示类似于“你→Bob”这样的关系呢?好在你知道的一种结构让你能够表示这种关系,它就是哈希表(《算法图解》学习笔记(五):哈希表,小名散列表(附代码))!
记住,哈希表让你能够将键映射到值。在这里,你要将节点映射到其所有邻居。
表示这种映射关系的Python代码如下。
graph = {}
graph["you"] = ["alice", "bob", "claire"]
注意,“你”被映射到了一个数组,因此 graph [“you”] 是一个数组,其中包含了“你”的所有邻居。
图不过是一系列的节点和边,因此在Python中,只需使用上述代码就可表示一个图。那像下面这样更大的图呢?
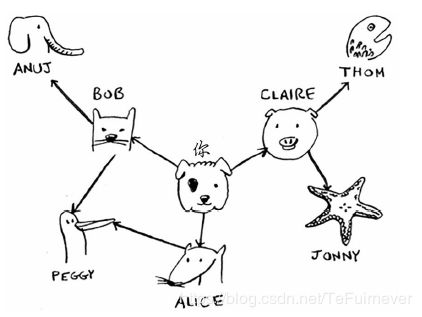
表示它的Python代码如下。
graph = {}
graph["you"] = ["alice", "bob", "claire"]
graph["bob"] = ["anuj", "peggy"]
graph["alice"] = ["peggy"]
graph["claire"] = ["thom", "jonny"]
graph["anuj"] = []
graph["peggy"] = []
graph["thom"] = []
graph["jonny"] = []
顺便问一句:键—值对的添加顺序重要吗?换言之,如果你这样编写代码:
graph["claire"] = ["thom", "jonny"]
graph["anuj"] = []
而不是这样编写代码:
graph["anuj"] = []
graph["claire"] = ["thom", "jonny"]
对结果有影响吗?
只要回顾一下前一章介绍的内容(《算法图解》学习笔记(五):哈希表,小名散列表(附代码)),你就知道没影响。哈希表是无序的,因此添加键—值对的顺序无关紧要。
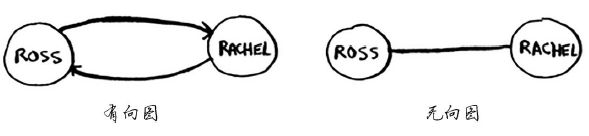
Anuj、Peggy、Thom 和 Jonny 都没有邻居,这是因为虽然有指向他们的箭头,但没有从他们出发指向其他人的箭头。这被称为 有向图(directed graph),其中的关系是单向的。因此,Anuj 是 Bob 的邻居,但 Bob 不是 Anuj 的邻居。无向图(undirected graph) 没有箭头,直接相连的节点互为邻居。例如,下面两个图是等价的。
五、实现算法
先概述一下这种算法的工作原理。
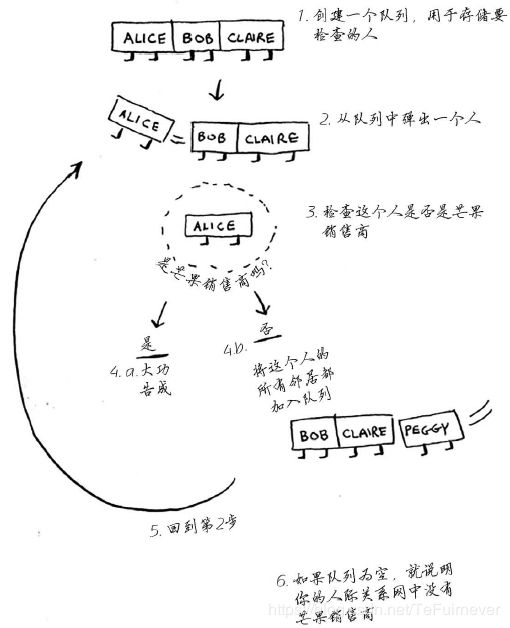
首先,创建一个队列。在Python中,可使用函数deque来创建一个双端队列。
from collections import deque
search_queue = deque() # 创建一个队列
search_queue += graph["you"] # 将你的邻居都加入到这个搜索队列中
别忘了,graph [“you”] 是一个数组,其中包含你的所有邻居,如 [“alice”, “bob”, “claire”]。这些邻居都将加入到搜索队列中。

下面来看看其他的代码。
while search_queue: # 只要队列不为空,
person = search_queue.popleft() # 就取出其中的第一个人
if person_is_seller(person): # 检查这个人是否是芒果销售商
print(person + " is a mango seller!") # 是芒果销售商
return True
else:
search_queue += graph[person] # 不是芒果销售商。将这个人的朋友都加入搜索队列
return False # 如果到达了这里,就说明队列中没人是芒果销售商
最后,你还需编写函数 person_is_seller,判断一个人是不是芒果销售商,如下所示。
def person_is_seller(name):
return name[-1] == 'm'
这个函数检查人的姓名是否以m结尾:如果是,他就是芒果销售商。这种判断方法有点搞笑,但就这个示例而言是可行的。下面来看看广度优先搜索的执行过程。

这个算法将不断执行,直到满足以下条件之一:
- 找到一位芒果销售商;
- 队列变成空的,这意味着你的人际关系网中没有芒果销售商。
Peggy 既是 Alice 的朋友又是 Bob 的朋友,因此她将被加入队列两次:一次是在添加 Alice 的朋友时,另一次是在添加 Bob 的朋友时。因此,搜索队列将包含两个 Peggy。

但你只需检查Peggy一次,看她是不是芒果销售商。如果你检查两次,就做了无用功。因此,检查完一个人后,应将其标记为已检查,且不再检查他。如果不这样做,就可能会导致无限循环。假设你的人际关系网类似于下面这样。
一开始,搜索队列包含你的所有邻居。

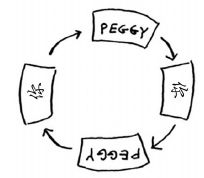
现在你检查Peggy。她不是芒果销售商,因此你将其所有邻居都加入搜索队列。

接下来,你检查自己。你不是芒果销售商,因此你将你的所有邻居都加入搜索队列。

以此类推。这将形成无限循环,因为搜索队列将在包含你和包含Peggy之间反复切换。
检查一个人之前,要确认之前没检查过他,这很重要。为此,你可使用一个列表来记录检查过的人。
考虑到这一点后,广度优先搜索的最终代码如下。
def search(name):
search_queue = deque()
search_queue += graph[name]
searched = [] # 这个数组用于记录检查过的人
while search_queue:
person = search_queue.popleft()
if not person in searched: # 仅当这个人没检查过时才检查
if person_is_seller(person):
print person + " is a mango seller!"
return True
else:
search_queue += graph[person]
searched.append(person) # 将这个人标记为检查过
return False
search("you")
请尝试运行这些代码,看看其输出是否符合预期。你也许应该将函数 person_is_seller 改为更有意义的名称。
python版本代码如下:
from collections import deque
def person_is_seller(name):
return name[-1] == 'm'
graph = {}
graph["you"] = ["alice", "bob", "claire"]
graph["bob"] = ["anuj", "peggy"]
graph["alice"] = ["peggy"]
graph["claire"] = ["thom", "jonny"]
graph["anuj"] = []
graph["peggy"] = []
graph["thom"] = []
graph["jonny"] = []
def search(name):
search_queue = deque()
search_queue += graph[name]
#这个数组是如何跟踪你以前搜索过的人的
searched = []
while search_queue:
person = search_queue.popleft()
#只有在你还没搜过这个人的时候才搜
if person not in searched:
if person_is_seller(person):
print(person + " is a mango seller!")
return True
else:
search_queue += graph[person]
#将此人标记为已搜索
searched.append(person)
return False
search("you")
![]()
c++版本代码如下:
#include 六、运行时间
如果你在你的整个人际关系网中搜索芒果销售商,就意味着你将沿每条边前行(记住,边是从一个人到另一个人的箭头或连接),因此运行时间至少为O(边数)。
你还使用了一个队列,其中包含要检查的每个人。将一个人添加到队列需要的时间是固定的,即为O(1),因此对每个人都这样做需要的总时间为O(人数)。所以,广度优先搜索的运行时间为O(人数 + 边数),这通常写作O(V + E),其中V为顶点数,E为边数。
七、小结
- 广度优先搜索指出是否有从A到B的路径。
- 如果有,广度优先搜索将找出最短路径。
- 面临类似于寻找最短路径的问题时,可尝试使用图来建立模型,再使用广度优先搜索来解决问题。
- 有向图中的边为箭头,箭头的方向指定了关系的方向,例如,rama→adit表示rama欠adit钱。
- 无向图中的边不带箭头,其中的关系是双向的,例如,ross - rachel表示“ross与rachel约会,而rachel也与ross约会”。
- 队列是先进先出(FIFO)的。
- 栈是后进先出(LIFO)的。
- 你需要按加入顺序检查搜索列表中的人,否则找到的就不是最短路径,因此搜索列表必须是队列。
- 对于检查过的人,务必不要再去检查,否则可能导致无限循环。
参考文章
- 《算法图解》