平面点云凸包曲线计算
平面点云凸包曲线计算
解法一
主要思想:分而治之
算法流程:
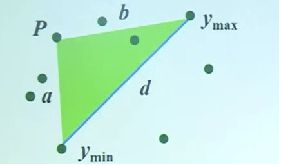
- 如图,先找出y坐标最大和做小的点,并入此多边形的顶点集(因为是y坐标最大和最小,所以此直线左边和右边的凸包合起来还是凸包);

- 对直线左右的点进行递归处理
2.1如直线左边,先找到一个离直线最远的点p并入多边形顶点集,连接p和ymin和ymax(因为是离直线d最远的点, 所以直线a左边的凸包和b上边的凸包合起来还是凸包,如图:
2.2将三角形内部的点删除,这部分点必然不是凸包上的点(这一步可以写也可以不写,如果不写,在后续判断中也不会将这些点判断为凸包上的点,只是会增大计算量)
2.3分别对直线a左边和直线b上边的点递归处理
算法时间复杂度:O(n^2)
测试代码
说明:
- 编程语言为C++
- 以链表的形式存储点(希望得到的轮廓点按照一定的顺序排列),
链表的形式方便元素的插入和删除,但是不利于元素的随机访问,后改为使用容器存储 - 使用第三方库(opencv),版本为2.4.8
struct PointCloud_Xu
{
Point2f point;
bool flag = false; //用于记录该点是否已经经过判定(无论是凸包上的点还是其他点)
void clear()
{
point = Point2f(0.0f, 0.0f);
flag = false;
}
};
double D_Point_Line2(Point2f P_start, Point2f P_end, Point2f P)
{
double result;
double t1 = (P_start.x - P.x) * (P_start.x - P_end.x);
double t2 = (P_start.y - P.y) * (P_start.y - P_end.y);
double t3 = 0;
double t4 = pow((P_start.x - P_end.x), 2.0) + pow((P_start.y - P_end.y), 2.0);
double t = (t1 + t2 + t3) / t4;
//求垂足(XYZ)
double X = P_start.x + t * (P_end.x - P_start.x);
double Y = P_start.y + t * (P_end.y - P_start.y);
double Z = 0;
result = sqrt(pow((X - P.x), 2.0) + pow((Y - P.y), 2.0));
return result;
}
void Max_Distance_Point(vector& P, Point2f P_start, Point2f P_end, Point2f center)
{
//Contour只包含两个点(初始状态)
if (center.x == (P_start.x + P_end.x) / 2.0 &&
center.y == (P_start.y + P_end.y) / 2.0)
{
int N1 = -1;
double D1 = -10;
int N2 = -1;
double D2 = -10;
for (size_t i = 0; i < P.size(); i++)
{
if (P.at(i).flag == false)
{
Point2f V1 = P_end - P_start;
Point2f V2 = P.at(i).point - P_start;
if (V1.x*V2.y - V2.x*V1.y > 0)
{
double d1 = D_Point_Line2(P_start, P_end, P.at(i).point);
if (d1>D1)
{
D1 = d1;
N1 = i;
}
}
else
{
double d2 = D_Point_Line2(P_start, P_end, P.at(i).point);
if (d2 > D2)
{
D2 = d2;
N2 = i;
}
}
}
}
P.at(N1).flag = true;
P.at(N2).flag = true;
}
//非初始状态
else
{
int N1 = -1;
double D1 = -10;
for (size_t i = 0; i D1)
{
D1 = d1;
N1 = i;
}
}
}
}
if (N1 != -1)
{
P.at(N1).flag = true;
}
}
}
main()
{
//计算包络线
vector P;
if (!P.empty())
{
P.clear();
}
string path_section = path_section1 + to_string(_ULONGLONG(i)) + ".txt";
inFlie.open(path_section);
if (!inFlie.is_open())
{
return;
}
for (size_t j = 0; j < 200; j++)
{
PointCloud_Xu P_tmp;
inFlie >> P_tmp.point.x;
inFlie >> P_tmp.point.y;
P_tmp.flag = false;
P.push_back(P_tmp);
}
inFlie.close();
//确定Ymax,Ymin
double Ymax = -10000;
double Ymin = 10000;
int Nmax = -1; //Ymax的序列号
int Nmin = -1; //Ymin的序列号
for (size_t j = 0; j < P.size(); j++)
{
if (P.at(j).point.y > Ymax)
{
Ymax = P.at(j).point.y;
Nmax = j;
}
if (P.at(j).point.y < Ymin)
{
Ymin = P.at(j).point.y;
Nmin = j;
}
}
P.at(Nmax).flag = true;
P.at(Nmin).flag = true;
vector contour;
if (!contour.empty())
{
contour.clear();
}
if (Nmax > Nmin)
{
contour.push_back(P.at(Nmin).point);
contour.push_back(P.at(Nmax).point);
}
else
{
contour.push_back(P.at(Nmax).point);
contour.push_back(P.at(Nmin).point);
}
Point2f center = P.at(Nmax).point + P.at(Nmin).point;
center.x /= 2.0;
center.y /= 2.0;
while (true)
{
int Contour_size = contour.size();
for (size_t j = 0; j < Contour_size; j++)
{
if (Contour_size==2)
{
Max_Distance_Point(P, contour[0], contour[1], center);
break;
}
else
{
Max_Distance_Point(P, contour[j], contour[(j+1)%contour.size()], center);
}
}
contour.clear();
for (size_t j = 0; j < P.size(); j++)
{
if (P.at(j).flag == true)
{
contour.push_back(P.at(j).point);
}
}
if (Contour_size == contour.size())
{
break;
}
}
//输出contour
string path_out = path_out1 + to_string(_ULONGLONG(i)) + ".txt";
outFile.open(path_out);
for (size_t j = 0; j < contour.size(); j++)
{
outFile << contour[j].x << " " << contour[j].y << endl;
}
outFile.close();
Mat test = Mat(480, 640, CV_8UC3, Scalar::all(255));
Point2f P_center = Point2f(0, 0);
for (size_t j = 0; j < P.size(); j++)
{
P_center += P.at(j).point;
}
P_center.x /= P.size();
P_center.y /= P.size();
for (size_t j = 0; j < P.size(); j++)
{
circle(test, P[j].point - P_center + Point2f(320, 240), 0.5, Scalar(0, 0, 255), -1, 8, 0);
line(test, P[j].point - P_center + Point2f(320, 240), P[(j + 1) % P.size()].point - P_center + Point2f(320, 240),
Scalar(0, 0, 255), 1, 8, 0);
}
for (size_t j = 0; j < contour.size(); j++)
{
circle(test, contour[j] - P_center + Point2f(320, 240), 0.5, Scalar(255, 0, 0), -1, 8, 0);
line(test, contour[j] - P_center + Point2f(320, 240), contour[(j + 1) % contour.size()] - P_center + Point2f(320, 240),
Scalar(255, 0, 0), 1, 8, 0);
}
imshow("test", test);
imwrite(path_out1 + to_string(_ULONGLONG(i)) + ".bmp", test);
waitKey(0);
}
解法二
主要思想:类似于贪心算法
算法流程:
- 确定点Xmax或者Xmin或Ymax或者Ymin,记为初始点
- 遍历所有点,根据点和当前点构成的向量的方向,计算得到下一个轮廓点
- 重复步骤2,直至最新得到的点为初始点
算法时间复杂度:O(n^2)
算法分析:需要事先知道所有点的坐标,一旦添加或者删除任意一个点,需要重新进行计算
解法三
主要思想:由局部到整体
算法流程:
- 确定两个初始点Ymax以及Ymin(Xmax以及Xmin也可以)
- 添加除了两个初始点之外的任意一个点
- 添加剩余的任意一个点,判断该点在当前凸包内部还是外部,若在凸包内部,则判断下一个点,若在凸包外部,则修正凸包
算法分析:不需要事先知道所有点,可以在运算过程中随时增加点,但是也不能做到随时删除点