自动微分(Automatic Differentiation)简介
现代深度学习系统中(比如MXNet, TensorFlow等)都用到了一种技术——自动微分。在此之前,机器学习社区中很少发挥这个利器,一般都是用Backpropagation进行梯度求解,然后进行SGD等进行优化更新。手动实现过backprop算法的同学应该可以体会到其中的复杂性和易错性,一个好的框架应该可以很好地将这部分难点隐藏于用户视角,而自动微分技术恰好可以优雅解决这个问题。接下来我们将一起学习这个优雅的技术:-)。本文主要来源于陈天奇在华盛顿任教的课程CSE599G1: Deep Learning System和《Automatic differentiation in machine learning: a survey》。
什么是自动微分
微分求解大致可以分为4种方式:
- 手动求解法(Manual Differentiation)
- 数值微分法(Numerical Differentiation)
- 符号微分法(Symbolic Differentiation)
- 自动微分法(Automatic Differentiation)
为了讲明白什么是自动微分,我们有必要了解其他方法,做到有区分有对比,从而更加深入理解自动微分技术。
手动求解法
手动求解其实就对应我们传统的backprop算法,我们求解出梯度公式,然后编写代码,代入实际数值,得出真实的梯度。在这样的方式下,每一次我们修改算法模型,都要修改对应的梯度求解算法,因此没有很好的办法解脱用户手动编写梯度求解的代码,这也是为什么我们需要自动微分技术的原因。
数值微分法
数值微分法是根据导数的原始定义:
f ′ ( x ) = lim h → 0 f ( x + h ) − f ( x ) h f'(x) = \lim_{h\to0} \frac{f(x+h)-f(x)}{h} f′(x)=h→0limhf(x+h)−f(x)
那么只要 h h h取很小的数值,比如0.0001,那么我们可以很方便求解导数,并且可以对用户隐藏求解过程,用户只要给出目标函数和要求解的梯度的变量,程序可以自动给出相应的梯度,这也是某种意义上的“自动微分”。不幸的是,数值微分法计算量太大,求解速度是这四种方法中最慢的,更加雪上加霜的是,它引起的roundoff error和truncation error使其更加不具备实际应用场景,为了弥补缺点,便有如下center difference approximation:
f ′ ( x ) = lim h → 0 f ( x + h ) − f ( x − h ) 2 h f'(x) = \lim_{h\to0} \frac{f(x+h)-f(x-h)}{2h} f′(x)=h→0lim2hf(x+h)−f(x−h)
可惜并不能完全消除truncation error,只是将误差减小。虽然数值微分法有如上缺点,但是由于它实在是太简单实现了,于是很多时候,我们利用它来检验其他算法的正确性,比如在实现backprop的时候,我们用的"gradient check"就是利用数值微分法。
符号微分法
符号微分是代替我们第一种手动求解法的过程,利用代数软件,实现微分的一些公式比如:
d d x ( f ( x ) + g ( x ) ) = d d x f ( x ) + d d x g ( x ) d d x f ( x ) g ( x ) = ( d d x f ( x ) ) g ( x ) + f ( x ) ( d d x g ( x ) ) d d x f ( x ) g ( x ) = f ′ ( x ) g ( x ) − f ( x ) g ′ ( x ) g ( x ) 2 \frac{d }{dx}\big (f(x)+g(x)\big) = \frac{d }{dx}f(x) + \frac{d }{dx}g(x) \\\frac{d }{dx}f(x)g(x) = \big(\frac{d }{dx}f(x)\big)g(x)+f(x)\big(\frac{d }{dx}g(x)\big) \\\frac{d }{dx}\frac{f(x)}{g(x)}=\frac{f'(x)g(x)-f(x)g'(x)}{g(x)^2} dxd(f(x)+g(x))=dxdf(x)+dxdg(x)dxdf(x)g(x)=(dxdf(x))g(x)+f(x)(dxdg(x))dxdg(x)f(x)=g(x)2f′(x)g(x)−f(x)g′(x)
然后对用户提供的具有closed form的数学表达式进行“自动微分"求解,什么是具有closed form的呢?也就是必须能写成完整数学表达式的,不能有编程语言中的循环结构,条件结构等。因此如果能将问题转化为一个纯数学符号问题,我们能利用现有的代数软件进行符号微分求解,这种程度意义上的“自动微分"其实已经很完美了。然而缺点我们刚刚也提及过了,就是必须要有closed form的数学表达式,另一个有名的缺点是“表达式膨胀"(expression swell)问题,如果不加小心就会使得问题符号微分求解的表达式急速“膨胀",导致最终求解速度变慢,对于这个问题请看如下图:

稍不注意,符号微分求解就会如上中间列所示,表达式急剧膨胀,导致问题求解也随着变慢。
自动微分法
终于轮到我们的主角登场,自动微分的存在依赖于它识破如下事实:
所有数值计算归根结底是一系列有限的可微算子的组合
自动微分法是一种介于符号微分和数值微分的方法:数值微分强调一开始直接代入数值近似求解;符号微分强调直接对代数进行求解,最后才代入问题数值;自动微分将符号微分法应用于最基本的算子,比如常数,幂函数,指数函数,对数函数,三角函数等,然后代入数值,保留中间结果,最后再应用于整个函数。因此它应用相当灵活,可以做到完全向用户隐藏微分求解过程,由于它只对基本函数或常数运用符号微分法则,所以它可以灵活结合编程语言的循环结构,条件结构等,使用自动微分和不使用自动微分对代码总体改动非常小,并且由于它的计算实际是一种图计算,可以对其做很多优化,这也是为什么该方法在现代深度学习系统中得以广泛应用。
自动微分Forward Mode
考察如下函数:
f ( x 1 , x 2 ) = l n ( x 1 ) + x 1 x 2 − s i n ( x 2 ) f(x_1,x_2) = ln(x_1)+x_1x_2-sin(x_2) f(x1,x2)=ln(x1)+x1x2−sin(x2)
我们可以将其转化为如下计算图:

转化成如上DAG(有向无环图)结构之后,我们可以很容易分步计算函数的值,并求取它每一步的导数值:

上表中左半部分是从左往右每个图节点的求值结果,右半部分是每个节点对于 x 1 x_1 x1的求导结果,比如 v 1 ˙ = d v d x 1 \dot{v_1}=\frac{dv}{dx_1} v1˙=dx1dv,注意到每一步的求导都利用到上一步的求导结果,这样不至于重复计算,因此也不会产生像符号微分法的"expression swell"问题。
自动微分的forward mode非常符合我们高数里面学习的求导过程,只要您对求导法则还有印象,理解forward mode自不在话下。如果函数输入输出为:
R → R m R \to R^m R→Rm
那么利用forward mode只需计算一次如上表右边过程即可,非常高效。对于输入输出映射为如下的:
R n → R m R^n \to R^m Rn→Rm
这样一个有 n n n个输入的函数,求解函数梯度需要 n n n遍如上计算过程。然而实际算法模型中,比如神经网络,通常输入输出是极其不成比例的,也就是:
n > > m n >> m n>>m
那么利用forward mode进行自动微分就太低效了,因此便有下面要介绍的reverse mode。
自动微分Reverse Mode
如果您理解神经网络的backprop算法,那么恭喜你,自动微分的backward mode其实就是一种通用的backprop算法,也就是backprop是reverse mode自动微分的一种特殊形式。从名字可以看出,reverse mode和forward mode是一对相反过程,reverse mode从最终结果开始求导,利用最终输出对每一个节点进行求导,其过程如下红色箭头所示:

其具体计算过程如下表所示:
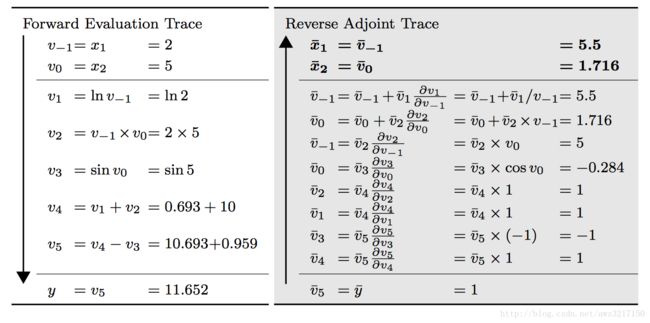
上表左边和之前的forward mode一致,用于求解函数值,右边则是reverse mode的计算过程,注意必须从下网上看,也就是一开始先计算输出 y y y对于节点 v 5 v_5 v5的导数,用 v ‾ 5 \overline v_5 v5表示 d y d v 5 \frac{dy}{dv_5} dv5dy,这样的记号可以强调我们对当前计算结果进行缓存,以便用于后续计算,而不必重复计算。由链式法则我们可以计算输出对于每个节点的导数。
比如对于节点 v 3 v_3 v3:
d y d v 3 = d y d v 5 d v 5 d v 3 \frac{dy}{dv_3} = \frac{dy}{dv_5}\frac{dv_5}{dv_3} dv3dy=dv5dydv3dv5
用另一种记法变得到:
d y d v 3 = v 5 ‾ d v 5 d v 3 \frac{dy}{dv_3} = \overline{v_5}\frac{dv_5}{dv_3} dv3dy=v5dv3dv5
比如对于节点 v 0 v_0 v0:
d y d v 0 = d y d v 2 d v 2 d v 0 + d y d v 3 d v 3 d v 0 \frac{dy}{dv_0} = \frac{dy}{dv_2}\frac{dv_2}{dv_0}+\frac{dy}{dv_3}\frac{dv_3}{dv_0} dv0dy=dv2dydv0dv2+dv3dydv0dv3
如果用另一种记法,便可得出:
d y d v 0 = v ‾ 2 d v 2 d v 0 + v ‾ 3 d v 3 d v 0 \frac{dy}{dv_0} = \overline v_2 \frac{dv_2}{dv_0}+\overline v_3 \frac{d v_3}{d v_0} dv0dy=v2dv0dv2+v3dv0dv3
和backprop算法一样,我们必须记住前向时当前节点发出的边,然后在后向传播的时候,可以搜集所有受到当前节点影响节点。
如上的计算过程,对于像神经网络这种模型,通常输入是上万到上百万维,而输出损失函数是1维的模型,只需要一遍reverse mode的计算过程,便可以求出输出对于各个输入的导数,从而轻松求取梯度用于后续优化更新。
#自动微分的实现
这里主要讲解reverse mode的实现方式,forward mode的实现基本和reverse mode一致,但是由于机器学习算法中大部分用reverse mode才可以高效求解,所以它是我们理解的重心。代码设计轮廓来源于CSE599G1的作业,通过分析完成作业,可以展示自动微分的简洁性和灵活可用性。
首先自动微分会将问题转化成一种有向无环图,因此我们必须构造基本的图部件,包括节点和边。可以先看看节点是如何实现的:
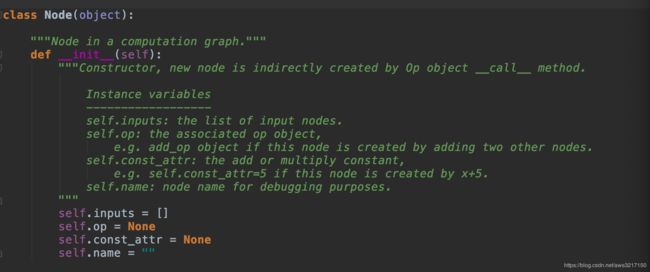
首先节点可以分为三种:
- 常数节点
- 变量节点
- 带操作算子节点
因此Node类中定义了op成员用于存储节点的操作算子,const_attr代表节点的常数值,name是节点的标识,主要用于调试。
对于边的实现则简单的多,每个节点只要知道本身的输入节点即可,因此用inputs来描述节点的关系。
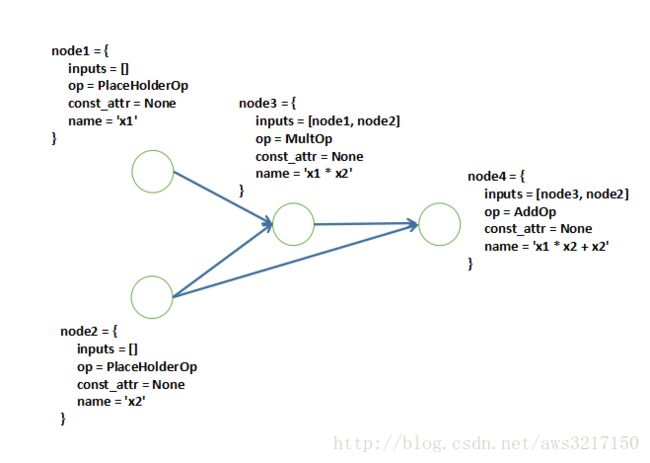
有了如上的定义,利用操作符重载,我们可以很简单构造一个计算图,举一个简单的例子:
f ( x 1 , x 2 ) = x 1 x 2 + x 2 f(x_1,x_2) = x_1x_2+x_2 f(x1,x2)=x1x2+x2
对于如上函数,只要重载加法和乘法操作符,我们可以轻松得到如下计算图:
操作算子是自动微分最重要的组成部分,接下来我们重点介绍,先上代码:

从定义可以看出,所有实际计算都落在各个操作算子中,上面代码应该抽象一些,我们来举一个乘法算子的例子加以说明:

我们重点讲解一下gradient方法,它接收两个参数,一个是node,也就是当前要计算的节点,而output_grad则是后面节点传来的,我们来看看它到底是啥玩意,对于如下例子:
y = f ( x 1 ∗ x 2 ) y = f(x_1*x_2) y=f(x1∗x2)
那么要求 y y y关于 x 1 x_1 x1的导数,那么根据链式法则可得:
∂ y ∂ x 1 = ∂ y ∂ f ∂ f ∂ x 1 = ∂ y ∂ x 1 x 2 ∂ x 1 x 2 ∂ x 1 = o u t p u t _ g r a d ∗ x 2 \frac{\partial y}{\partial x_1} = \frac{\partial y}{\partial f}\frac{\partial f}{\partial x_1} = \frac{\partial y}{\partial x_1x_2}\frac{\partial x_1x_2}{\partial x_1}=output\_grad * x_2 ∂x1∂y=∂f∂y∂x1∂f=∂x1x2∂y∂x1∂x1x2=output_grad∗x2
则output_grad就是上面的 ∂ y ∂ f \frac{\partial y}{\partial f} ∂f∂y,计算 y y y对于 x 2 x_2 x2类似。因此在程序中我们会返回如下:
return [node.inputs[1] * output_grad, node.inputs[0] * output_grad]
再来介绍一个特殊的op——PlaceHolderOp,它的作用就如同名字,起到占位符的作用,也就是自动微分中的变量,它不会参与实际计算,只等待用户给他提供实际值,因此他的实现如下:

了解了节点和操作算子的定义,接下来我们考虑如何协调执行运算。首先是如何计算函数值,对于一幅计算图,由于节点与节点之间的计算有一定的依赖关系,比如必须先计算node1之后才可以计算node2,那么如何能正确处理好计算关系呢?一个简单的方式是对图节点进行拓扑排序,这样可以保证需要先计算的节点先得到计算。这部分代码由Executor掌控:

Executor是实际计算图的引擎,用户提供需要计算的图和实际输入,Executor计算相应的值和梯度。
如何从计算图中计算函数的值,上面我们已经介绍了,接下来是如何自动计算梯度。reverse mode的自动微分,要求从输出到输入节点,按照先后依赖关系,对各个节点求取输出对于当前节点的梯度,那么和我们上面介绍的刚好相反,为了得到正确计算节点顺序,我们可以将图节点的拓扑排序倒序即可。代码也很简单,如下所示:

这里先介绍一个新的算子——oneslike_op。他是一个和numpy自带的oneslike函数一样的算子,作用是构造reverse梯度图的起点,因为最终输出关于本身的梯度就是一个和输出shape一样的全1数组,引入oneslike_op可以使得真实计算得以延后,因此gradients方法最终返回的不是真实的梯度,而是梯度计算图,然后可以复用Executor,计算实际的梯度值。
紧接着是根据输出节点,获得倒序的拓扑排序序列,然后遍历序列,构造实际的梯度计算图。我们重点来介绍node_to_output_grad和node_to_output_grads_list这两个字典的意义。
先关注node_to_output_grads_list,他key是节点,value是一个梯度列表,代表什么含义呢?先看如下部分计算图:

此时我们要计算输出 y y y关于节点 n 1 n_1 n1的导数,那么我们观察到他的发射边连接的节点有 n 3 , n 4 n_3,n_4 n3,n4,而对应 n 3 , n 4 n_3,n_4 n3,n4节点调用相应op的gradient方法,会返回输出 y y y关于各个输入节点的导数。此时为了准确计算输出 y y y关于节点 n 1 n_1 n1的导数,我们需要将其发射边关联节点的计算梯度搜集起来,比如上面的例子,我们需要搜集:
n o d e _ t o _ o u t p u t _ g r a d s _ l i s t = { n 1 : [ ∂ y ∂ n 3 ∂ n 3 ∂ n 1 , ∂ y ∂ n 4 ∂ n 4 ∂ n 1 ] } node\_to\_output\_grads\_list = \{\\ n1:\big [\frac{\partial y}{\partial n_3}\frac{\partial n_3}{\partial n_1},\frac{\partial y}{\partial n_4}\frac{\partial n_4}{\partial n_1}\big] \\\} node_to_output_grads_list={n1:[∂n3∂y∂n1∂n3,∂n4∂y∂n1∂n4]}
一旦搜集好对应输出边节点关于当前节点导数,那么当前节点的导数便可以由链式法则计算得出,也就是:
∂ y ∂ n 1 = ∂ y ∂ n 3 ∂ n 3 ∂ n 1 + ∂ y ∂ n 4 ∂ n 4 ∂ n 1 \frac{\partial y}{\partial n_1}=\frac{\partial y}{\partial n_3}\frac{\partial n_3}{\partial n_1}+\frac{\partial y}{\partial n_4}\frac{\partial n_4}{\partial n_1} ∂n1∂y=∂n3∂y∂n1∂n3+∂n4∂y∂n1∂n4
因此node_to_output_grad字典存储的就是节点对应的输出关于节点的导数。经过gradients函数执行后,会返回需要求取输出关于某节点的梯度计算图:
而对于Executor而言,它并不知道此时的图是否被反转,它只关注用户实际输入,还有计算相应的值而已。
#自动梯度的应用
有了上面的大篇幅介绍,我们其实已经实现了一个简单的自动微分引擎了,接下来看如何使用:
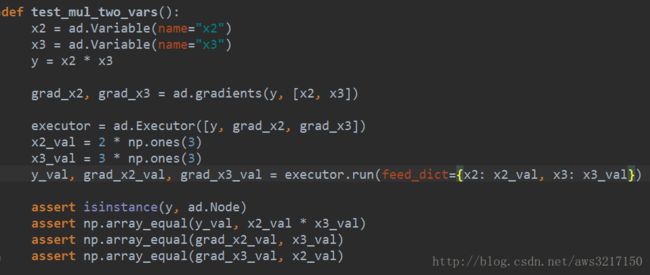
使用相当简单,我们像编写普通程序一样,对变量进行各种操作,只要提供要求导数的变量,还有提供实际输入,引擎可以正确给出相应的梯度值。
下面给出一个根据自动微分训练Logistic Regression的例子:
import autodiff as ad
import numpy as np
def logistic_prob(_w):
def wrapper(_x):
return 1 / (1 + np.exp(-np.sum(_x * _w)))
return wrapper
def test_accuracy(_w, _X, _Y):
prob = logistic_prob(_w)
correct = 0
total = len(_Y)
for i in range(len(_Y)):
x = _X[i]
y = _Y[i]
p = prob(x)
if p >= 0.5 and y == 1.0:
correct += 1
elif p < 0.5 and y == 0.0:
correct += 1
print("总数:%d, 预测正确:%d" % (total, correct))
def plot(N, X_val, Y_val, w, with_boundary=False):
import matplotlib.pyplot as plt
for i in range(N):
__x = X_val[i]
if Y_val[i] == 1:
plt.plot(__x[1], __x[2], marker='x')
else:
plt.plot(__x[1], __x[2], marker='o')
if with_boundary:
min_x1 = min(X_val[:, 1])
max_x1 = max(X_val[:, 1])
min_x2 = float(-w[0] - w[1] * min_x1) / w[2]
max_x2 = float(-w[0] - w[1] * max_x1) / w[2]
plt.plot([min_x1, max_x1], [min_x2, max_x2], '-r')
plt.show()
def gen_2d_data(n):
x_data = np.random.random([n, 2])
y_data = np.ones(n)
for i in range(n):
d = x_data[i]
if d[0] + d[1] < 1:
y_data[i] = 0
x_data_with_bias = np.ones([n, 3])
x_data_with_bias[:, 1:] = x_data
return x_data_with_bias, y_data
def auto_diff_lr():
x = ad.Variable(name='x')
w = ad.Variable(name='w')
y = ad.Variable(name='y')
# 注意,以下实现某些情况会有很大的数值误差,
# 所以一般真实系统实现会提供高阶算子,从而减少数值误差
h = 1 / (1 + ad.exp(-ad.reduce_sum(w * x)))
L = y * ad.log(h) + (1 - y) * ad.log(1 - h)
w_grad, = ad.gradients(L, [w])
executor = ad.Executor([L, w_grad])
N = 100
X_val, Y_val = gen_2d_data(N)
w_val = np.ones(3)
plot(N, X_val, Y_val, w_val)
executor = ad.Executor([L, w_grad])
test_accuracy(w_val, X_val, Y_val)
alpha = 0.01
max_iters = 300
for iteration in range(max_iters):
acc_L_val = 0
for i in range(N):
x_val = X_val[i]
y_val = np.array(Y_val[i])
L_val, w_grad_val = executor.run(feed_dict={w: w_val, x: x_val, y: y_val})
w_val += alpha * w_grad_val
acc_L_val += L_val
print("iter = %d, likelihood = %s, w = %s" % (iteration, acc_L_val, w_val))
test_accuracy(w_val, X_val, Y_val)
plot(N, X_val, Y_val, w_val, True)
if __name__ == '__main__':
auto_diff_lr()
看到吧,用户可以完全感受不到微分求解过程,真正做到自动微分! 完整实现代码可戳此处。
参考引用
- CSE599G1: Deep Learning System
- Automatic differentiation in machine learning: a survey