无线充电小车项目
**无线充电小车**
摘要
本系统使用无线充电与超级电容,可安全,快速,有效的为小车提供电能。该设计是利用近场感应,也就是电感耦合,是由震荡电路产生交流信号,经波形电路处理后,最后由功率放大器将波形放大,形成交流电,发射端线圈以交流电推动而产生交流电磁场,从而将能量从发射端转移到接收端。通过桥式电路整流和滤波电容滤波成直流电给小车内部超级电容充电,当无线充电发射器停止充电时,使用继电器自动控制开关,经MT3608DC-DC变换给小车供电,从而实现无线充电电动小车前进。
目录
一、方案设计及论证 ………………………….1
系统框图 ………………………………………..1
驱动选择 ………………………………………..1
小车选择 ………………………………………..2
自动开关选择 …………………………………2
二、理论分析与计算 ………………………….3
三、电路与程序设计…………………………………4
四、测试方案与测试结果 ………………………….6
调试方案 ………………………………………..6
调试仪器 ………………………………………..6
调试结果 ………………………………………..6
调试分析 ………………………………………..6
测试结果 ………………………………………..7
五、结论与心得…… …………………………………7

系统框图
驱动选择
方案一:使用集成电机驱动芯片L298N,该芯片采用桥式驱动电路,内部包含四通道逻辑驱动电路,可以直接驱动两个直流电机,并且体积较小,需要接的外部器件也比较小,因此板子可以做的比较小,方便在小车上安装与使用,但是会有一定的损耗。L298N内部电路如下

方案二:由于只要求小车直线前进,不需要驱动来控制小车运行方向与速度,所以可以去掉驱动,输出直接连接电机,这样能够减小损耗,同时又能减重,综上分析,采用方案二
小车选择
方案一:设计小车为四轮小车,小车采用四轮驱动,每一个车轮都由一个直流电机控制。底盘为坚固的亚克力板,以防止小车变型;该小车优点在于抓地性比较好,直线行驶过程中方向不易改变,但耗费电量速度较快,影响其爬坡能力。
方案二:设计小车车体为三轮小车,小车采用两轮驱动,两轮各用一个直流电机执行,前轮为一万向轮。耗费电量速度慢,但方向容易改变,我们将万向轮固定住,综合考虑采用方案二
自动开关的选择
方案一:使用PMOS管IRF9540作为开关,优点在于基本没有损耗,经过测试,IRF9540N栅级电压不够,mos管的DS一直处于导通状态,升高电压即可,但充电小车无法达到其启动电压,IRF9540做开关电路图如下所示

方案二:使用继电器作为控制开关,当线圈通电,动铁芯在电磁力作用下动作吸合,带动动触点动作,使常闭触点分开,常开触点闭合;从而实现超级电容充电的目的,当线圈断电,动铁芯在弹簧的作用下带动动触点复位,经过DCDC升压,超级电容开始供电给电机,从而实现控制小车断电后自动前进的目的。在电路中要给继电器并联一个IN4007,因为继电器电磁鉄线圈是电感元件,它在切断电源的瞬间要产生很高的自感电压,其方向与电源电压相反,此时二极管导通,消除了此电压,避免了自感电压对电路中电路元件的损坏。电路图如下所示:
综上分析,采用方案二。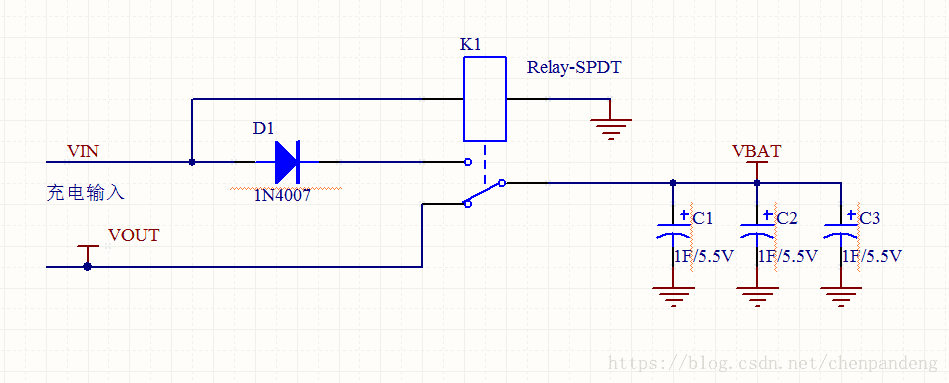
理论分析与计算
1.本系统使用超级电容进行储能,我们对超级电容进行并联以提高容量,电容的储电量和电压平方成正比,所以均衡功率输出的时候,前一阶段电压下降比较慢,后面逐渐加速越来越快,直到降低到某个不可用的电压之下。则使用DC-DC电路来解决这一问题。
2.因电容两端电压不能突变的特性,在上电初始阶段,电容器件形同“短路”,将形成极大的浪涌充电电流,会对整流模块很大的电流冲击而损坏,所以,我们在整流和电容储能回路之间串入了限流电阻。
3.本系统使用LM317构成的恒流源,从而为电路提供恒定电流,以下是LM317构成的恒流源的工作原理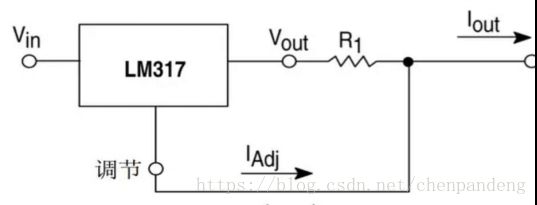
经测试,它对充电过程限流,对放电过程限压作用过强,故舍弃此模块。
4.DCDC使用MT3608,该器件是一个恒定频率,6针SOT23电流模式的升压转换器,适合小型,低功耗应用。MT3608包括欠压锁定、电流限制和热过载保护,以防输出过载时损坏。工作原理图如下图:

5.由震荡电路产生交流信号,经计算可得F=1/[2π×(LC)^1/2],则F=50K.T=1/F=20μs.可以得到PWM波的周期应该为20μs
电路与程序设计
无线充电发射端由震荡电路产生交流信号,经波形电路处理后,最后由功率放大器将波形放大,形成交流电,发射端线圈以交流电推动而产生交流电磁场,电路图如下所示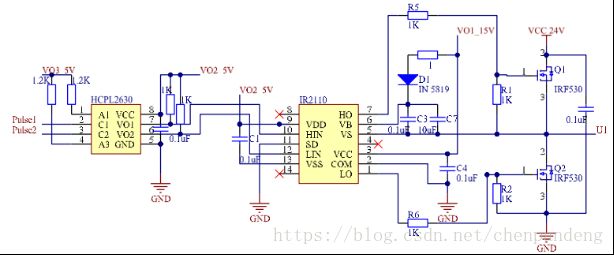
小车电路图如下

PWM波程序:
include “stm32f4xx.h”
include “t0.h”
include “led.h”
include “delay.h”
extern u8 a;
void t3_init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBasestruture;
NVIC_InitTypeDef NVIC_Initstrue;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
TIM_TimeBasestruture.TIM_Period=arr;
TIM_TimeBasestruture.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBasestruture.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBasestruture.TIM_Prescaler=psc;
TIM_TimeBaseInit(TIM3,&TIM_TimeBasestruture);
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE);
NVIC_Initstrue.NVIC_IRQChannel=TIM3_IRQn;
NVIC_Initstrue.NVIC_IRQChannelCmd=ENABLE;
NVIC_Initstrue.NVIC_IRQChannelPreemptionPriority=1;
NVIC_Initstrue.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_Initstrue);
TIM_Cmd(TIM3,ENABLE);
}
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update)==1)
{
a++;
if(a==20)
a=0;
if(a==0||a==10)
led1=!led1;
if(a==1|a==9)
led2=!led2;
TIM_ClearITPendingBit(TIM3,TIM_IT_Update);
}
}
测试方案与测试结果
调试方案
测试方案1:发射端于接收端距离不变,通过改变并联电容数量,检测电容电压,以及小车能前进的距离,反复实验取平均值,来确定最佳的并联电容数量。
测试方案2:电容大小不变,通过改变发射端与接收端的距离,检测小车能上坡的距离,反复实验取平均值,来确定最佳的限流电阻。
调试仪器
秒表,直尺,5V电源
调试结果
调试方案一
序号 电容大小
(单位:F) 电容电压最大值
(单位:V) 小车前进距离
(单位:m)
1 2 5.0 0.6
2 3 5.0 2.0
3 4 4.9 5.0
4 5 4.5 6.6
5 6 4.2 8.2
调试方案二
序号 发射端与接收端距离
(单位:mm) 小车上坡距离
(单位:m)
1 15 1.03
2 10 1.24
3 5 1.42
4 2 1.78
调试分析
硬件选择需要大量的调试与测试,找到最适合运动状态的硬件。如果少量的实验数据并不能实现小车运动的最优距离,通过测试得到的数据选取最佳电容大小为6F,而且发射端与接收端距离越近,小车上坡距离越远。
测试结果
经过大量的调试,确定最佳方案后进行多次测试,在水平路面上充电一分钟可前进距离平均为8.8米,在斜坡上可爬坡最大角度为35°距离为1.1米
结论与心得
经过这段时间努力奋战,从开始准备到第一时间接到项目,一直都全身心地投入项目之中。虽然尝试过以前的制作类似的题目,在制作硬件时遇到了一些问题,时间很急,而且还没有开始调试,经过多次更改方案,虽然浪费了不少的时间,但是还是成功的完成了硬件的调试。有辛酸也有欣喜,每当取得一点点的进步,都会欣喜若狂。也许这次经历我们不是最艰难的,但我们一定是最努力的,虽然最终成品不是那么满意,但也不会有遗憾。至少努力了,奋斗了。当然还要感谢学校老师后勤工作支持,是我们能安心做项目。