【Faster RCNN】Faster R-CNN笔记
论文理论笔记部分:
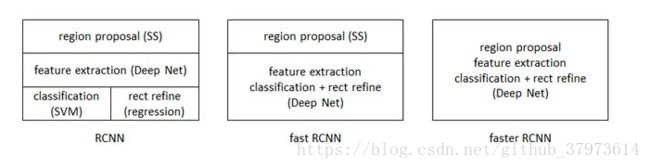
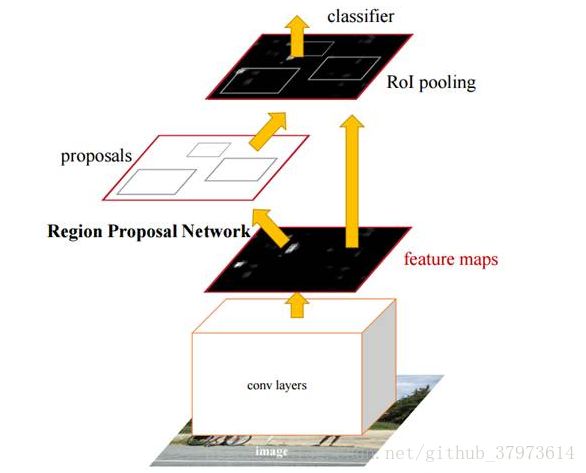
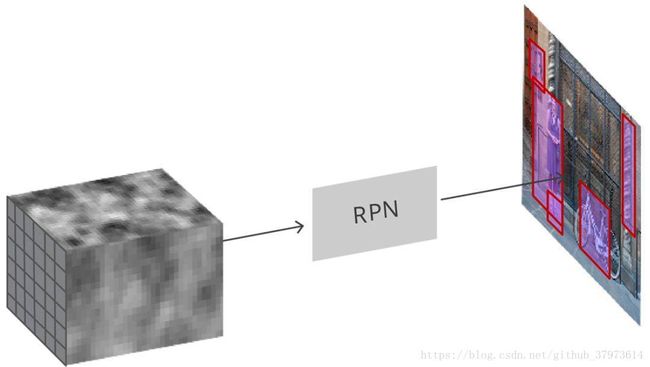
rcnn是将每个proposal都放入到卷积层来进行计算,fast rcnn呢,则是将图片和proposal作为输入,并且proposal是为feature map的提取提供位置信息、为regression提供位置信息、以及在classification提供位置信息。在这里,faster rcnn的输入是一张图,提取到了共享的feature map后,将feature map用来进行RPN提取proposals操作以及联合RPN的输出进行ROIs操作,最后作为fast rcnn网络的输入来做回归和分类。
 图片来源
图片来源
Two modules:
- a deep fully convolution network that proposes regions as an attention mechanism.
- the fast RCNN detector that uses the proposed regions.
faster RCNN
1、RPN(Region Proposal Networks)
sppnet和fast RCNN减少了检测网络的时间,但是region proposal还是耗费很多时间。FASTER-RCNN解决了这个问题,提出了Region Proposal Network(RPN)代替selective search部分。
输入:image with any size;
输出:rectangular obect proposals with objectness score。
ultimate goal: share computation with a Fast R-CNN,implement end-to-end network.
Fast RCNN结构图
为了使RPN和fast rcnn分享卷积特征,所以这两个网络要使用同样的卷积层。在论文中,使用了ZF和VGG19两个网络的卷积层,作为共享卷积层。
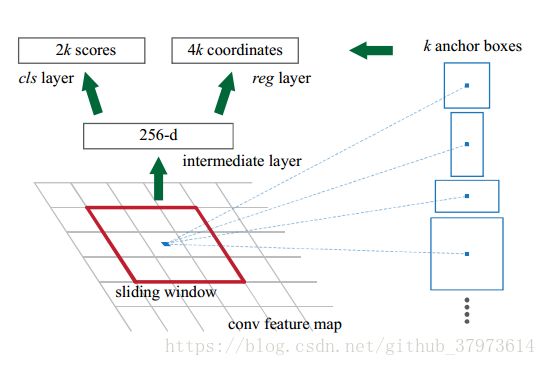
如上图所示,为了生成region proposals,在最后一个卷积层上,用一个n*n(n=3)的小窗口(卷积层)滑动每个位置,把特征降为256维。把这256为特征分别输入到连个全连接层cls和reg。
2、Translation-Invariant Anchors(平移不变性):
如果移动了一张图像中的一个物体,这proposal应该也移动了,而且相同的函数可以预测出热议未知的proposal。MultiBox不具备如此功能。平移不变性可以介绍模型大小。
在每个滑动窗口的位置预测k个region proposal(实验默认k=9)叫做anchor,默认使用3种尺度(scale:实验中使用128^2,256^2,512^2)和3种长宽比(ratio:实验中使用1:1,1:2,2:1),以滑动窗口的中心点为中心(An anchor is centered at the sliding window in question.)。对于一个convolutional feature map of size ![]() ,一共有
,一共有![]() 个anchor(这里因为每个窗口点产生一个feature map 单元,每个单元里有k个anchors)。
个anchor(这里因为每个窗口点产生一个feature map 单元,每个单元里有k个anchors)。
【our anchor-based method is built on a pyramind of anchors, which is more cost-efficient.Our method classifies and regresses bounding boxes with reference to anchor boxes of multiple scales and aspect ratios】
3、Multi-Scale Anchor as Regression Reference
Two popular ways for multi-scale predictions
- based on image/feature pyramids,如DPM and CNN-based methods。图像被resized成不同尺寸,然后为每一种尺寸计算feature maps(HOG或者deep convolutional features)。这种方法比较费时。
- use sliding windows of multiple scales(and/or aspect ratio) on the feature maps——filters金字塔。第二种方法经常和第一种方法一起使用。
在本论文中:anchor金字塔——more cost-efficient,只依靠单尺寸的图像和feature map。
the design of multiscale anchors is a key component for sharing features without extra cost for addressing scales.
4、Loss Function for learning region proposal
为了训练PRNs,赋予anchors二值的类标对应是否包含object(只是是否包含有对象,不分类)。来对anchors赋label:
- positive label:
- the anchor/anchors with the highest IOU overlap with a ground-truth box,
- or,an anchor that has an IOU overlap higher than 0.7 with any group-truth box.
- negative label:
IOU ratio < 0.3 for all groud-truth boxes.
- 其余的非P非N的anchors have no contribution.
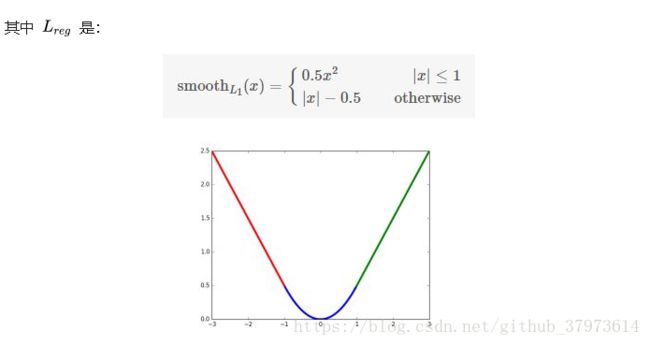
损失函数【![]() 是log loss,
是log loss,![]() 是smooth_L1 loss】:
是smooth_L1 loss】:
![]()
tips:
![]() is the index of an anchor
is the index of an anchor
![]() is the predicted probability of anchor i being an object.
is the predicted probability of anchor i being an object.
![]() 为真实值 1 or 0
为真实值 1 or 0
![]() 是预测边界框四个坐标组成的向量
是预测边界框四个坐标组成的向量
normalized by ![]() ,weighted by a balanced parameter
,weighted by a balanced parameter ![]() .【在论文实验代码中:
.【在论文实验代码中:![]() ,
,![]() ~
~![]() 】
】
for bounding box:
![]() ,
,![]()
![]() ,
,![]()
![]() ,
,![]()
![]() ,
,![]()
tips:![]() ——>predicted box,
——>predicted box, ![]() ——>anchor box,
——>anchor box,![]() ——>groud-truth box。x与y是box的中心坐标,w,h为宽和高。
——>groud-truth box。x与y是box的中心坐标,w,h为宽和高。
可以认为是从anchor box回归到附近的gound truth box。
5、Training RPNs
- image-centric sampling strategy
- mini-batch arises from a single image that contains many positive and negative example anchors.
- 随机在一张图片中采样256个anchors来计算一个mini-batch的loss function。正负anchors=1:1
- all new layers的权值初始化:高斯分布(
 ,
,  ), all other layers(比如共享卷积层)用imageNet来权值初始化。用ZF net来进行微调。
), all other layers(比如共享卷积层)用imageNet来权值初始化。用ZF net来进行微调。 - 学习率:0.001(60k)——>0.0001(20k)
- 动量(momentum):0.9
- weight decay:0.0005
6、Sharing Feature for RPN and Fast R-CNN
- sharing convolutional layers between the two networks, rather than learning two separate networks
- 三种训练的方法:
- (1)Alternative training:迭代,先训练RPN,然后用RPN的网络权重对Fast-rcnn网络进行初始化,并用之前RPN输出的proposal去作为输入去训练Fast R-CNN。被Fast R-CNN微调的网络然后用来初始化RPN,以此迭代。本论文所有的实现都是用该方法。
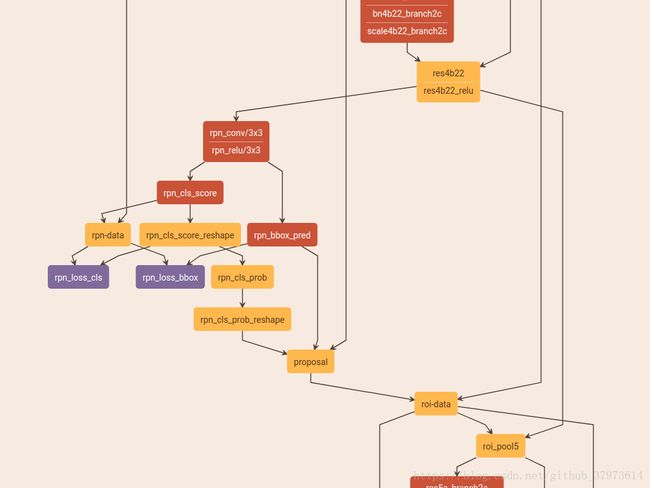
- (2)Approximate joint training:RPN和fast R-CNN融合到一个网络中进行训练。这里会有一个小瑕疵,就是会忽略掉RPN部分位置回归在反向传播时候的导数(end2end,代码常用实现)。即在下面结构中的rpn_bbox_pred-------------->proposal时,在反向传播时会切断这条路的计算,因为不方便求出其值,所以直接被忽略掉。(某一份代码里的做法)
-

-
- (3)Non-Approximate joint training:解决第二种的瑕疵,但是paper中没有提到。
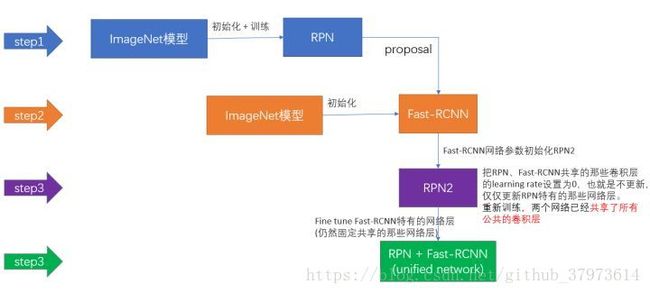
- (4)four-step Alternating Training
- 4-step Alternating Traing【作者发布的源代码】
- step1:train RPN, initialized with an ImgNet-pre-trained model and fine-tuned end-to-end for the region tack.
- step2:train a separate detection network by Fast R-CNN using the proposals generated by the step1 RPN. This network is also initialized by the ImgNet-pre-trained model.At this point, the two network do not share conv layers.
- step3:use the detector network to initialize RPN training, but we fix the shared conv layers and only fine-tuned the layers unique to RPN. Now the two networks share conv layers.
- step4:keep the shared conv layers fixed, fine-tune the unique layers of Fast R-CNN.
7、implementation Details
- Multi-scale and speed-accuracy之间的trade-off
- To reduce redundancy, we adopt non-maximun-suppression(NMS) on the proposal regions based on their cls scores.
8、网络结构(1)
(1)VGG介绍:
VGG-16:VGG名字来自于在ImageNet ILSVRC 2014竞赛中使用此网络的小组组名,首次发布于论文[Very Deep Convolution Networks for large-Scale Image Recognition]。
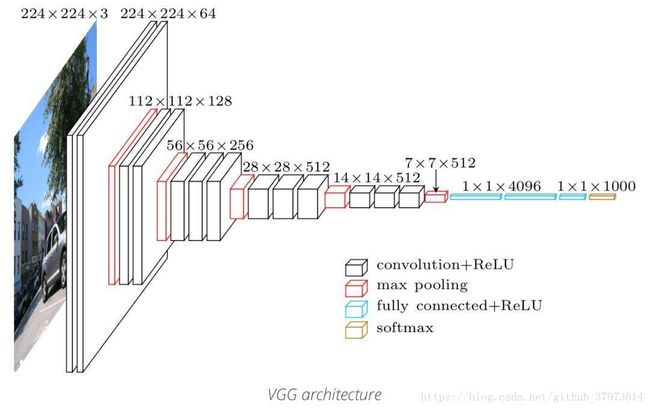
- 当使用VGG作为分类任务时,其输入是224x224x3的张量,在分裂任务中输入图片尺寸固定,因为网络最后一部分的全连接层需要固定长度的输入。在接入全连接层时,通常需要将最后一层卷积的输出展开成一维张量。
- 因为要使用卷积网络中间层的输出所以输入图片的尺寸不再有限制。因为只有卷积层参与计算。
- 每一层卷积网络都在前一层的基础上提取了更加抽象的特征。第一层学习到了简单的边缘,第二层寻找目标边缘的模式,以激活后续卷积网络中更加复杂的形状。最终,我们得到了一个在空间维度上比原始图片小很多,但表征更加深的卷积特征图。特征图的长和宽会随着卷积层间的池化二缩小,深度会随着卷积层过滤器的数量而增加。

左侧:锚点, 中心:特征图空间单一锚点在原图中的表达, 右侧:所有锚点在原图中的表达
(2)RPN
RPN采用卷积特征图并在图像上生成proposal。
- RPN接受所有的参考框(锚点)并为目标输出一套好的建议。RPN会:(i)输出锚点作为目标的概率,但是它不关心分类(2):输出边框回归,用来调整锚点以更好的拟合其预测的目标。
- RPN是用完全卷积的方式实现的,用基础网络返回的卷积特征图作为输入。首先,我们使用一个有256个通道和3x3卷积核大小的卷积层,然后我们有两个使用1x1卷积核并行卷积网络,其通道数量取决于每个点的锚点数量。
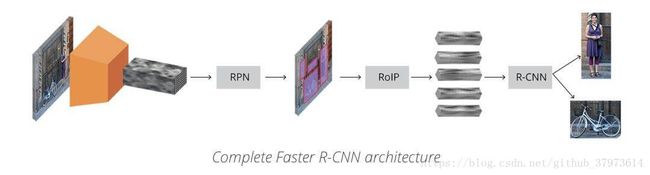
基于区域的卷积神经网络(R-CNN)是Faster R-CNN工作流的最后一步。从图像上获得卷积特征图之后,用它通过RPN来获得目标建议并最终为每个建议提取特征(通过RoI Pooling),最后我们需要使用这些特征进行分类。R-CNN试图模仿分类CNNs的最后阶段,在这个阶段用一个全连接层为每个目标类输出一个分数。
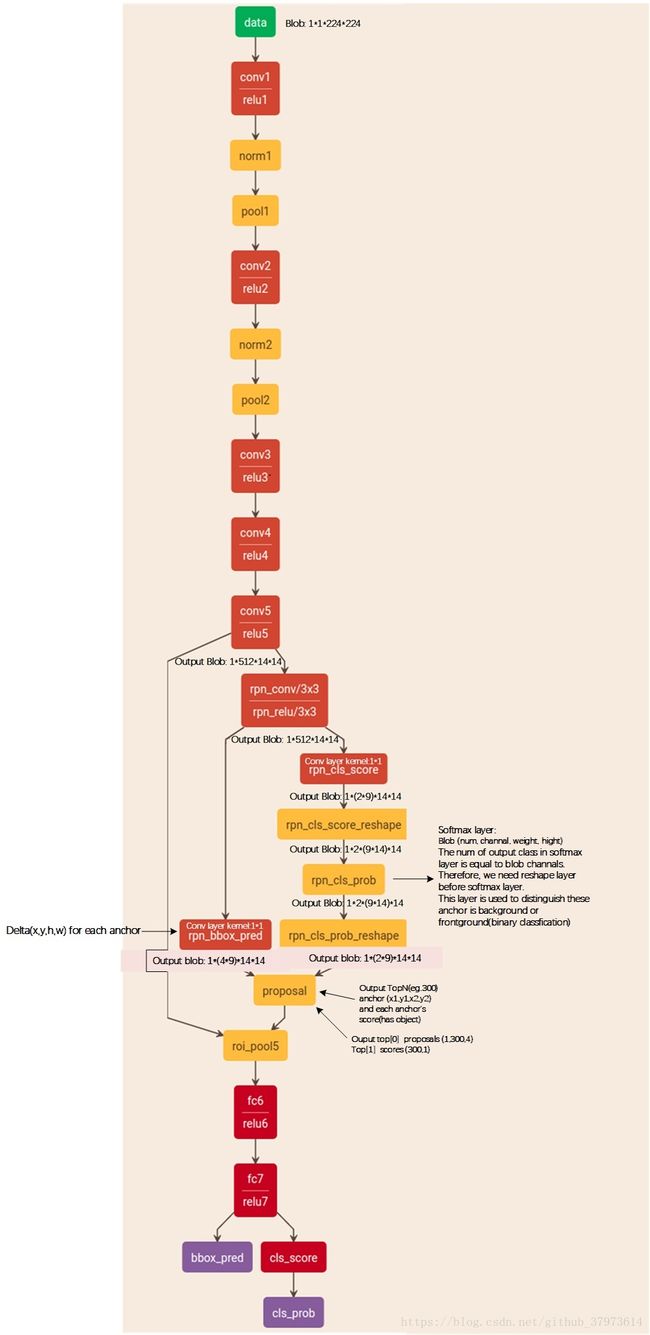
9. 网络结构(2):参考自http://huchaowei.com/2018/01/16/faster-rcnn%E7%BD%91%E7%BB%9C%E5%89%96%E6%9E%90/
faster R-CNN=特征提取+RPN+fast R-CNN组成,这里选择ZF(VGG16)为作为特征提取的网络,再介入RPN,生成proposals。
四个部分:
- Conv layers:使用你一组基础的conv+relu+pooling层提取image的feature maps
- Region Proposal Networks(RPN):该层生成一系列anchors并映射到原图,然后通过softmax判断anchors属于foreground或者background,再利用bounding box regression修正anchors获得精确的proposals.
- Roi Pooling:该层收集输入的feature maps和proposals,综合这些信息后提取proposal feature,送入后续全连接层判定目标类别。
- Classification和bbox regression:利用proposal feature maps计算proposal的类别,同时再次bounding box regression获取检测框最终的精确位置。
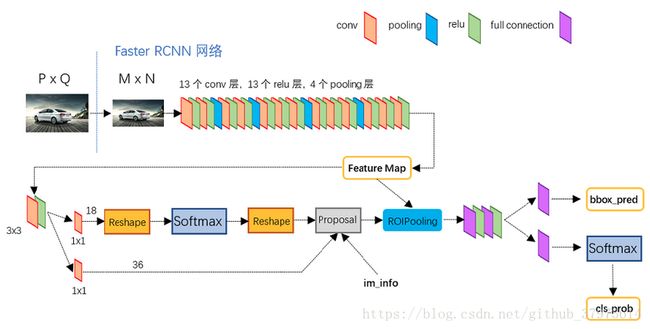
如上图:
- Conv layers:conv layers部分共分为13个conv层,13个relu层,4个pooling层。为了保证Con layers生成的feature map都可以和原图对应起来,卷积过程中使用pad保证卷积后宽高不变,经过一次pooling操作,宽高变为原来的1/2,一个MxN大小的矩阵经过conv layers固定变为(M/16)x(N/16)。一共有四次pooling,故一共是1/16。在feature后的3x3卷积,有256个通道。
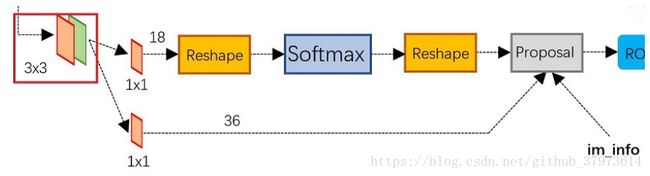
RPN
- RPN:网络分为两条线,上面的一条通过softmax分类anchors获得foreground和background(检测目标是foreground),下面一条用于计算对于anchors的bounding box regression偏移量,以获得精确的proposal。(一条分类一条回归,分类是有无目标的分类)最后的Proposal层则负责综合foreground和bounding box regression偏移量获取proposals,同时剔除大小和超出边界的proposals。
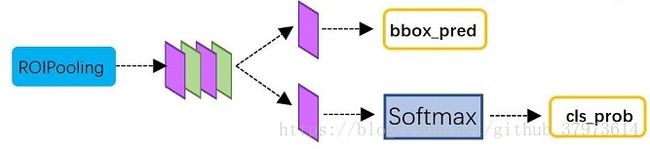
- ROI pooling层负责收集proposal,统一proposals的尺度,送入后续网络。它有两个输入:原始的proposal boxes(大小各有不同)以及原始的feature maps
- classification:classification部分利用已经获取的Proposal feature maps,通过full connect层与softmax计算每个proposal具体属于哪个类别,输出cls_prob概率向量,同时再次利用bounding box regression获取每个proposal的位置偏移量bbox_pred,用于回归更加精确的目标检测框。
- 通过全连接层和softmax对proposal进行分类,这实际上已经是识别的范畴了。
- 再次对Proposal进行bounding box regression,以获取更高精度的rect box。
Faster R-CNN训练:
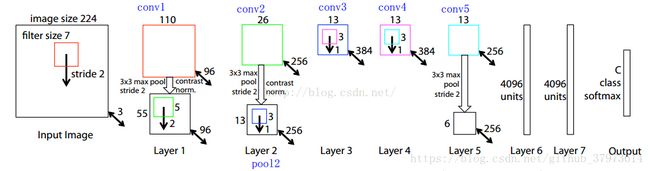 ZF网络结构图(bone net)
ZF网络结构图(bone net)
faster R-CNN是在已经训练好的model(如VGG_CNN_M_1024, VGG, ZF)的基础上进行训练。实际训练分为6个步骤:
- 在已经训练好的model上,训练RPN网络,对应stage1_rpn_train.pt
- 利用第一步训练好的RPN,收集proposals,对应rpn_test_pt
- 第一次训练Faster RCNN网络,对应stage1_fast_rcnn_train.pt
- 第二次训练RPN网络,对应stage2_rpn_train.pt
- 再次利用第四步训练好的RPN,手机proposals,对应rpn_test.pt
- 第二次训练Fast R-CNN,对应stage2_fast_cnn_train.pt
可以看到训练的过程是一个”迭代“的过程,不过只是两次,两次的原因是:A similar alternative training can be run for more iterations. but we have observed negligible improvements。即更多了没什么效果提升。
一些细节【推荐】:
- 提取特征是与训练好的模型提取图片的特征。论文中主要使用的是caffe的预训练模型VGG16。最后提取出feature map出来。
- RPN:
- 作者使用RPN,产生anchor是通过对每个feature map中的点都使用3种scale和3种ratio的排列组合共九种anchor。然后用这九种anchor在feature map左右上下移动,如:对一个512x62x37的feature map,有62x37x9=20000个anchor。也就是对一张图片,有20000个左右的anchor。
- anchor的数量和feature map的数量有关,不同的feature map对应的anchor数量也不一样。RPN在CNN提取feature map的基础上,再增加一个卷积,然后利用两个1x1的卷积分别进行二分类和位置回归。进行分类的卷积核通道数量为9x2(9个anchor,每个anchor二分类,使用交叉熵损失=-yloga-(1-y)log(1-a) ),进行回归的卷积核通道数为9x4(9个anchor,每个anchor有四个位置)。RPN是一个全卷积网络,这样对输入图片的尺寸没有要求。
- 接下来要做的就是将20000多个候选的anchor选出256个anchor来进行分类和位置回归。选择过程前面有讲到。对于每个anchor,要么为1(前景),要么为0(背景),而gt_loc则是由四个位置参数(tx, ty, tw, th)组成,按照上面的回归公式比直接回归坐标更好。计算分类损失用的是交叉熵损失,而计算回归损失用的是Smooth_l1_loss。在计算回归损失的时候,只计算正样本(前景)的损失,不计算负样本的损失。
- 现在利用RPN可以从上万个anchor中寻找到一定数目更有可能的候选框。在训练RCNN时,这个数目是2000,在测试推理阶段,这个数目是300(为了速度),ROI不是单纯的从anchor中选取一些出来作为候选框,它还会利用回归参数,微调anchor的形状和位置。可以这么理解:在RPN阶段,先通过feature map生成成千上万个anchor,然后利用ground truth Bounding boxes,训练这些anchor,而后从anchor中找出一定数目的候选区域(RoIs),RoIs在下一个阶段用来训练RoIHead,最后生成Predict Bounding Boxes。
- 虽然原始论文中使用4-Step Alternating Training,即四步交替迭代训练,然而现在在GitHub上,大多是采用的近似联合训练(Approximate Joint training),端到端,速度更快。那么Approximate Joint training是通过将RPN分类损失、回归损失、RoI分类损失、回归损失相加来作为最后的损失,来进行反向训练。
- 源码中的三个creator
- AnchorTargetCreator:负责在训练RPN的时候,从上万个anchor中选择一些(比如256)进行训练,以使的正负样本的比例大概是1:1,同时给出训练的位置参数目标。即返回gt_rpn_loc和gt_rpn_label。
- ProposalTargetCreator:负责在训练RoIHead/Fast RCNN的时候,从RoIs选择 一部分(比如128)用以训练。同时给定训练目标,返回(sample_RoI,gt_RoI_loc,gt_RoI_label)
- ProposalCreator:在RPN中,从上万个anchor中,选择一定数目(2000或者300),调整大小和位置,生成RoIs,用以Fast RCNN训练或者测试。
- sum:其中AnchorTargetCreator和ProposalTargetCreator是为了生成训练的目标,只是在训练阶段用到,ProposalCreator是RPN为Fast RCNN生成RoIs,在训练和测试阶段都会用到。三个共同点在于他们都不用考虑反向传播。
- 为什么在RPN的时候选择IoU阈值为0.7?
- #pass
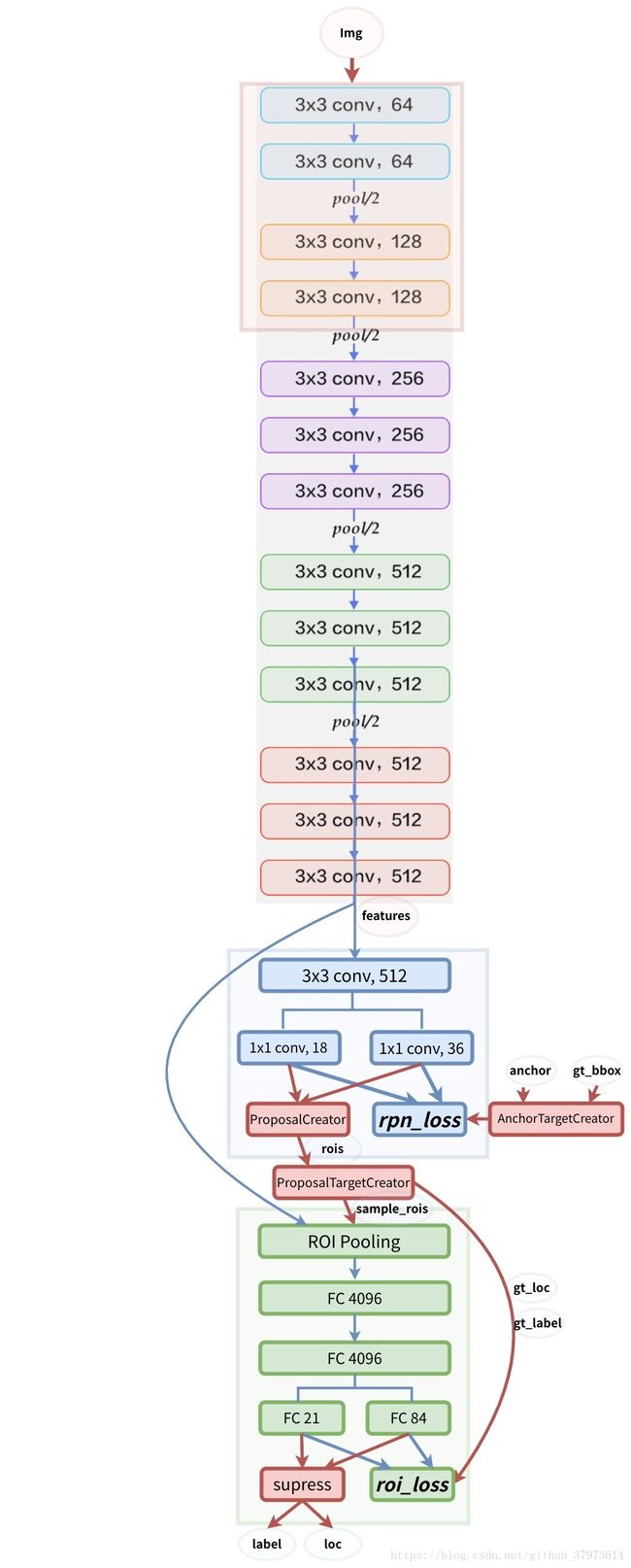 Faster RCNN整体流程图,其中蓝线表示会进行反向传播,红线则不会
Faster RCNN整体流程图,其中蓝线表示会进行反向传播,红线则不会
 有数据流的网络结构图《 参考》
有数据流的网络结构图《 参考》