tensorflow版本Faster R-CNN特征图可视化
参考文献:
https://blog.csdn.net/zd_nupt/article/details/77508083
endernewton 的 Tensorflow 版 Faster RCNN 代码:
https://github.com/endernewton/tf-faster-rcnn
网上一般使用tensorboard,但是slim封装没有保存中间操作,无法用,只能自己提取block的特征可视化。
具体代码:
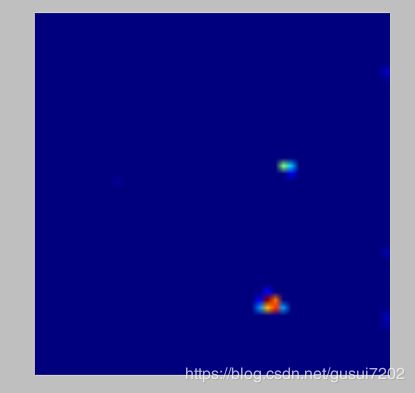
在下面我用的resnetv1_101,也就是slim封装好的模型。下面可视化RPN输入的特征图。

单张显示:(看出来已经对目标有感应了。)
集体显示:

说得具体一点:
在faster-master-lib文件夹下,有生成网络的network类代码network.py主要修改这里面。在RPN生成的时候,把输入的特征数据保存下来,然后再test-image的时候,加入上面的绘图程序就可以了,如要要其他地方的特征就需要想办法把其他位置的特征数据保存下来,然后绘图。
具体修改后的Network代码是这样的。
# --------------------------------------------------------
# Tensorflow Faster R-CNN
# Licensed under The MIT License [see LICENSE for details]
# Written by Xinlei Chen
# --------------------------------------------------------
from __future__ import absolute_import
from __future__ import division
from __future__ import print_function
import tensorflow as tf
import tensorflow.contrib.slim as slim
from tensorflow.contrib.slim import losses
from tensorflow.contrib.slim import arg_scope
import numpy as np
from layer_utils.snippets import generate_anchors_pre, generate_anchors_pre_tf
from layer_utils.proposal_layer import proposal_layer, proposal_layer_tf
from layer_utils.proposal_top_layer import proposal_top_layer, proposal_top_layer_tf
from layer_utils.anchor_target_layer import anchor_target_layer
from layer_utils.proposal_target_layer import proposal_target_layer
from utils.visualization import draw_bounding_boxes
from model.config import cfg
from tensorflow.python.ops import variable_scope
import matplotlib.pyplot as plt
class Network(object):
def __init__(self):
self._predictions = {}
self._losses = {}
self._anchor_targets = {}
self._proposal_targets = {}
self._layers = {}
self._gt_image = None
self._act_summaries = []
self._score_summaries = {}
self._train_summaries = []
self._event_summaries = {}
self._variables_to_fix = {}
self._bb = {}#添加这个
def _add_gt_image(self):
# add back mean
image = self._image + cfg.PIXEL_MEANS
# BGR to RGB (opencv uses BGR)
resized = tf.image.resize_bilinear(image, tf.to_int32(self._im_info[:2] / self._im_info[2]))
self._gt_image = tf.reverse(resized, axis=[-1])
def _add_gt_image_summary(self):
# use a customized visualization function to visualize the boxes
if self._gt_image is None:
self._add_gt_image()
image = tf.py_func(draw_bounding_boxes,
[self._gt_image, self._gt_boxes, self._im_info],
tf.float32, name="gt_boxes")
return tf.summary.image('GROUND_TRUTH', image)
def _add_act_summary(self, tensor):
tf.summary.histogram('ACT/' + tensor.op.name + '/activations', tensor)
tf.summary.scalar('ACT/' + tensor.op.name + '/zero_fraction',
tf.nn.zero_fraction(tensor))
def _add_score_summary(self, key, tensor):
tf.summary.histogram('SCORE/' + tensor.op.name + '/' + key + '/scores', tensor)
def _add_train_summary(self, var):
tf.summary.histogram('TRAIN/' + var.op.name, var)
def _reshape_layer(self, bottom, num_dim, name):
input_shape = tf.shape(bottom)
with tf.variable_scope(name) as scope:
# change the channel to the caffe format
to_caffe = tf.transpose(bottom, [0, 3, 1, 2])
# then force it to have channel 2
reshaped = tf.reshape(to_caffe,
tf.concat(axis=0, values=[[1, num_dim, -1], [input_shape[2]]]))
# then swap the channel back
to_tf = tf.transpose(reshaped, [0, 2, 3, 1])
return to_tf
def _softmax_layer(self, bottom, name):
if name.startswith('rpn_cls_prob_reshape'):
input_shape = tf.shape(bottom)
bottom_reshaped = tf.reshape(bottom, [-1, input_shape[-1]])
reshaped_score = tf.nn.softmax(bottom_reshaped, name=name)
return tf.reshape(reshaped_score, input_shape)
return tf.nn.softmax(bottom, name=name)
def _proposal_top_layer(self, rpn_cls_prob, rpn_bbox_pred, name):
with tf.variable_scope(name) as scope:
if cfg.USE_E2E_TF:
rois, rpn_scores = proposal_top_layer_tf(
rpn_cls_prob,
rpn_bbox_pred,
self._im_info,
self._feat_stride,
self._anchors,
self._num_anchors
)
else:
rois, rpn_scores = tf.py_func(proposal_top_layer,
[rpn_cls_prob, rpn_bbox_pred, self._im_info,
self._feat_stride, self._anchors, self._num_anchors],
[tf.float32, tf.float32], name="proposal_top")
rois.set_shape([cfg.TEST.RPN_TOP_N, 5])
rpn_scores.set_shape([cfg.TEST.RPN_TOP_N, 1])
return rois, rpn_scores
def _proposal_layer(self, rpn_cls_prob, rpn_bbox_pred, name):
with tf.variable_scope(name) as scope:
if cfg.USE_E2E_TF:
rois, rpn_scores = proposal_layer_tf(
rpn_cls_prob,
rpn_bbox_pred,
self._im_info,
self._mode,
self._feat_stride,
self._anchors,
self._num_anchors
)
else:
rois, rpn_scores = tf.py_func(proposal_layer,
[rpn_cls_prob, rpn_bbox_pred, self._im_info, self._mode,
self._feat_stride, self._anchors, self._num_anchors],
[tf.float32, tf.float32], name="proposal")
rois.set_shape([None, 5])
rpn_scores.set_shape([None, 1])
return rois, rpn_scores
# Only use it if you have roi_pooling op written in tf.image
def _roi_pool_layer(self, bootom, rois, name):
with tf.variable_scope(name) as scope:
return tf.image.roi_pooling(bootom, rois,
pooled_height=cfg.POOLING_SIZE,
pooled_width=cfg.POOLING_SIZE,
spatial_scale=1. / 16.)[0]
def _crop_pool_layer(self, bottom, rois, name):
with tf.variable_scope(name) as scope:
batch_ids = tf.squeeze(tf.slice(rois, [0, 0], [-1, 1], name="batch_id"), [1])
# Get the normalized coordinates of bounding boxes
bottom_shape = tf.shape(bottom)
height = (tf.to_float(bottom_shape[1]) - 1.) * np.float32(self._feat_stride[0])
width = (tf.to_float(bottom_shape[2]) - 1.) * np.float32(self._feat_stride[0])
x1 = tf.slice(rois, [0, 1], [-1, 1], name="x1") / width
y1 = tf.slice(rois, [0, 2], [-1, 1], name="y1") / height
x2 = tf.slice(rois, [0, 3], [-1, 1], name="x2") / width
y2 = tf.slice(rois, [0, 4], [-1, 1], name="y2") / height
# Won't be back-propagated to rois anyway, but to save time
bboxes = tf.stop_gradient(tf.concat([y1, x1, y2, x2], axis=1))
pre_pool_size = cfg.POOLING_SIZE * 2
crops = tf.image.crop_and_resize(bottom, bboxes, tf.to_int32(batch_ids), [pre_pool_size, pre_pool_size], name="crops")
return slim.max_pool2d(crops, [2, 2], padding='SAME')
def _dropout_layer(self, bottom, name, ratio=0.5):
return tf.nn.dropout(bottom, ratio, name=name)
def _anchor_target_layer(self, rpn_cls_score, name):
with tf.variable_scope(name) as scope:
rpn_labels, rpn_bbox_targets, rpn_bbox_inside_weights, rpn_bbox_outside_weights = tf.py_func(
anchor_target_layer,
[rpn_cls_score, self._gt_boxes, self._im_info, self._feat_stride, self._anchors, self._num_anchors],
[tf.float32, tf.float32, tf.float32, tf.float32],
name="anchor_target")
rpn_labels.set_shape([1, 1, None, None])
rpn_bbox_targets.set_shape([1, None, None, self._num_anchors * 4])
rpn_bbox_inside_weights.set_shape([1, None, None, self._num_anchors * 4])
rpn_bbox_outside_weights.set_shape([1, None, None, self._num_anchors * 4])
rpn_labels = tf.to_int32(rpn_labels, name="to_int32")
self._anchor_targets['rpn_labels'] = rpn_labels
self._anchor_targets['rpn_bbox_targets'] = rpn_bbox_targets
self._anchor_targets['rpn_bbox_inside_weights'] = rpn_bbox_inside_weights
self._anchor_targets['rpn_bbox_outside_weights'] = rpn_bbox_outside_weights
self._score_summaries.update(self._anchor_targets)
return rpn_labels
def _proposal_target_layer(self, rois, roi_scores, name):
with tf.variable_scope(name) as scope:
rois, roi_scores, labels, bbox_targets, bbox_inside_weights, bbox_outside_weights = tf.py_func(
proposal_target_layer,
[rois, roi_scores, self._gt_boxes, self._num_classes],
[tf.float32, tf.float32, tf.float32, tf.float32, tf.float32, tf.float32],
name="proposal_target")
rois.set_shape([cfg.TRAIN.BATCH_SIZE, 5])
roi_scores.set_shape([cfg.TRAIN.BATCH_SIZE])
labels.set_shape([cfg.TRAIN.BATCH_SIZE, 1])
bbox_targets.set_shape([cfg.TRAIN.BATCH_SIZE, self._num_classes * 4])
bbox_inside_weights.set_shape([cfg.TRAIN.BATCH_SIZE, self._num_classes * 4])
bbox_outside_weights.set_shape([cfg.TRAIN.BATCH_SIZE, self._num_classes * 4])
self._proposal_targets['rois'] = rois
self._proposal_targets['labels'] = tf.to_int32(labels, name="to_int32")
self._proposal_targets['bbox_targets'] = bbox_targets
self._proposal_targets['bbox_inside_weights'] = bbox_inside_weights
self._proposal_targets['bbox_outside_weights'] = bbox_outside_weights
self._score_summaries.update(self._proposal_targets)
return rois, roi_scores
def _anchor_component(self):
with tf.variable_scope('ANCHOR_' + self._tag) as scope:
# just to get the shape right
height = tf.to_int32(tf.ceil(self._im_info[0] / np.float32(self._feat_stride[0])))
width = tf.to_int32(tf.ceil(self._im_info[1] / np.float32(self._feat_stride[0])))
if cfg.USE_E2E_TF:
anchors, anchor_length = generate_anchors_pre_tf(
height,
width,
self._feat_stride,
self._anchor_scales,
self._anchor_ratios
)
else:
anchors, anchor_length = tf.py_func(generate_anchors_pre,
[height, width,
self._feat_stride, self._anchor_scales, self._anchor_ratios],
[tf.float32, tf.int32], name="generate_anchors")
anchors.set_shape([None, 4])
anchor_length.set_shape([])
self._anchors = anchors
self._anchor_length = anchor_length
def _build_network(self, is_training=True):
# select initializers
if cfg.TRAIN.TRUNCATED:
initializer = tf.truncated_normal_initializer(mean=0.0, stddev=0.01)
initializer_bbox = tf.truncated_normal_initializer(mean=0.0, stddev=0.001)
else:
initializer = tf.random_normal_initializer(mean=0.0, stddev=0.01)
initializer_bbox = tf.random_normal_initializer(mean=0.0, stddev=0.001)
net_conv = self._image_to_head(is_training)
with tf.variable_scope(self._scope, self._scope):
# build the anchors for the image
self._anchor_component()
# region proposal network
rois = self._region_proposal(net_conv, is_training, initializer)
# region of interest pooling
if cfg.POOLING_MODE == 'crop':
pool5 = self._crop_pool_layer(net_conv, rois, "pool5")
else:
raise NotImplementedError
fc7 = self._head_to_tail(pool5, is_training)
with tf.variable_scope(self._scope, self._scope):
# region classification
cls_prob, bbox_pred = self._region_classification(fc7, is_training,
initializer, initializer_bbox)
self._score_summaries.update(self._predictions)
return rois, cls_prob, bbox_pred
def _smooth_l1_loss(self, bbox_pred, bbox_targets, bbox_inside_weights, bbox_outside_weights, sigma=1.0, dim=[1]):
sigma_2 = sigma ** 2
box_diff = bbox_pred - bbox_targets
in_box_diff = bbox_inside_weights * box_diff
abs_in_box_diff = tf.abs(in_box_diff)
smoothL1_sign = tf.stop_gradient(tf.to_float(tf.less(abs_in_box_diff, 1. / sigma_2)))
in_loss_box = tf.pow(in_box_diff, 2) * (sigma_2 / 2.) * smoothL1_sign \
+ (abs_in_box_diff - (0.5 / sigma_2)) * (1. - smoothL1_sign)
out_loss_box = bbox_outside_weights * in_loss_box
loss_box = tf.reduce_mean(tf.reduce_sum(
out_loss_box,
axis=dim
))
return loss_box
def _add_losses(self, sigma_rpn=3.0):
with tf.variable_scope('LOSS_' + self._tag) as scope:
# RPN, class loss
rpn_cls_score = tf.reshape(self._predictions['rpn_cls_score_reshape'], [-1, 2])
rpn_label = tf.reshape(self._anchor_targets['rpn_labels'], [-1])
rpn_select = tf.where(tf.not_equal(rpn_label, -1))
rpn_cls_score = tf.reshape(tf.gather(rpn_cls_score, rpn_select), [-1, 2])
rpn_label = tf.reshape(tf.gather(rpn_label, rpn_select), [-1])
rpn_cross_entropy = tf.reduce_mean(
tf.nn.sparse_softmax_cross_entropy_with_logits(logits=rpn_cls_score, labels=rpn_label))
# RPN, bbox loss
rpn_bbox_pred = self._predictions['rpn_bbox_pred']
rpn_bbox_targets = self._anchor_targets['rpn_bbox_targets']
rpn_bbox_inside_weights = self._anchor_targets['rpn_bbox_inside_weights']
rpn_bbox_outside_weights = self._anchor_targets['rpn_bbox_outside_weights']
rpn_loss_box = self._smooth_l1_loss(rpn_bbox_pred, rpn_bbox_targets, rpn_bbox_inside_weights,
rpn_bbox_outside_weights, sigma=sigma_rpn, dim=[1, 2, 3])
# RCNN, class loss
cls_score = self._predictions["cls_score"]
label = tf.reshape(self._proposal_targets["labels"], [-1])
cross_entropy = tf.reduce_mean(tf.nn.sparse_softmax_cross_entropy_with_logits(logits=cls_score, labels=label))
# RCNN, bbox loss
bbox_pred = self._predictions['bbox_pred']
bbox_targets = self._proposal_targets['bbox_targets']
bbox_inside_weights = self._proposal_targets['bbox_inside_weights']
bbox_outside_weights = self._proposal_targets['bbox_outside_weights']
loss_box = self._smooth_l1_loss(bbox_pred, bbox_targets, bbox_inside_weights, bbox_outside_weights)
self._losses['cross_entropy'] = cross_entropy
self._losses['loss_box'] = loss_box
self._losses['rpn_cross_entropy'] = rpn_cross_entropy
self._losses['rpn_loss_box'] = rpn_loss_box
loss = cross_entropy + loss_box + rpn_cross_entropy + rpn_loss_box
regularization_loss = tf.add_n(tf.losses.get_regularization_losses(), 'regu')
self._losses['total_loss'] = loss + regularization_loss
self._event_summaries.update(self._losses)
return loss
def _region_proposal(self, net_conv, is_training, initializer):
rpn = slim.conv2d(net_conv, cfg.RPN_CHANNELS, [3, 3], trainable=is_training, weights_initializer=initializer,
scope="rpn_conv/3x3")
self._bb=rpn#把tensor的数值提取出来
self._act_summaries.append(rpn)
rpn_cls_score = slim.conv2d(rpn, self._num_anchors * 2, [1, 1], trainable=is_training,
weights_initializer=initializer,
padding='VALID', activation_fn=None, scope='rpn_cls_score')
# change it so that the score has 2 as its channel size
rpn_cls_score_reshape = self._reshape_layer(rpn_cls_score, 2, 'rpn_cls_score_reshape')
rpn_cls_prob_reshape = self._softmax_layer(rpn_cls_score_reshape, "rpn_cls_prob_reshape")
rpn_cls_pred = tf.argmax(tf.reshape(rpn_cls_score_reshape, [-1, 2]), axis=1, name="rpn_cls_pred")
rpn_cls_prob = self._reshape_layer(rpn_cls_prob_reshape, self._num_anchors * 2, "rpn_cls_prob")
rpn_bbox_pred = slim.conv2d(rpn, self._num_anchors * 4, [1, 1], trainable=is_training,
weights_initializer=initializer,
padding='VALID', activation_fn=None, scope='rpn_bbox_pred')
if is_training:
rois, roi_scores = self._proposal_layer(rpn_cls_prob, rpn_bbox_pred, "rois")
rpn_labels = self._anchor_target_layer(rpn_cls_score, "anchor")
# Try to have a deterministic order for the computing graph, for reproducibility
with tf.control_dependencies([rpn_labels]):
rois, _ = self._proposal_target_layer(rois, roi_scores, "rpn_rois")
else:
if cfg.TEST.MODE == 'nms':
rois, _ = self._proposal_layer(rpn_cls_prob, rpn_bbox_pred, "rois")
elif cfg.TEST.MODE == 'top':
rois, _ = self._proposal_top_layer(rpn_cls_prob, rpn_bbox_pred, "rois")
else:
raise NotImplementedError
self._predictions["rpn_cls_score"] = rpn_cls_score
self._predictions["rpn_cls_score_reshape"] = rpn_cls_score_reshape
self._predictions["rpn_cls_prob"] = rpn_cls_prob
self._predictions["rpn_cls_pred"] = rpn_cls_pred
self._predictions["rpn_bbox_pred"] = rpn_bbox_pred
self._predictions["rois"] = rois
return rois
def _region_classification(self, fc7, is_training, initializer, initializer_bbox):
cls_score = slim.fully_connected(fc7, self._num_classes,
weights_initializer=initializer,
trainable=is_training,
activation_fn=None, scope='cls_score')
cls_prob = self._softmax_layer(cls_score, "cls_prob")
cls_pred = tf.argmax(cls_score, axis=1, name="cls_pred")
bbox_pred = slim.fully_connected(fc7, self._num_classes * 4,
weights_initializer=initializer_bbox,
trainable=is_training,
activation_fn=None, scope='bbox_pred')
self._predictions["cls_score"] = cls_score
self._predictions["cls_pred"] = cls_pred
self._predictions["cls_prob"] = cls_prob
self._predictions["bbox_pred"] = bbox_pred
return cls_prob, bbox_pred
def _image_to_head(self, is_training, reuse=None):
raise NotImplementedError
def _head_to_tail(self, pool5, is_training, reuse=None):
raise NotImplementedError
def create_architecture(self, mode, num_classes, tag=None,
anchor_scales=(8, 16, 32), anchor_ratios=(0.5, 1, 2)):
self._image = tf.placeholder(tf.float32, shape=[1, None, None, 3])
self._im_info = tf.placeholder(tf.float32, shape=[3])
self._gt_boxes = tf.placeholder(tf.float32, shape=[None, 5])
self._tag = tag
self._num_classes = num_classes
self._mode = mode
self._anchor_scales = anchor_scales
self._num_scales = len(anchor_scales)
self._anchor_ratios = anchor_ratios
self._num_ratios = len(anchor_ratios)
self._num_anchors = self._num_scales * self._num_ratios
training = mode == 'TRAIN'
testing = mode == 'TEST'
assert tag != None
# handle most of the regularizers here
weights_regularizer = tf.contrib.layers.l2_regularizer(cfg.TRAIN.WEIGHT_DECAY)
if cfg.TRAIN.BIAS_DECAY:
biases_regularizer = weights_regularizer
else:
biases_regularizer = tf.no_regularizer
# list as many types of layers as possible, even if they are not used now
with arg_scope([slim.conv2d, slim.conv2d_in_plane, \
slim.conv2d_transpose, slim.separable_conv2d, slim.fully_connected],
weights_regularizer=weights_regularizer,
biases_regularizer=biases_regularizer,
biases_initializer=tf.constant_initializer(0.0)):
rois, cls_prob, bbox_pred = self._build_network(training)
layers_to_output = {'rois': rois}
for var in tf.trainable_variables():
self._train_summaries.append(var)
if testing:
stds = np.tile(np.array(cfg.TRAIN.BBOX_NORMALIZE_STDS), (self._num_classes))
means = np.tile(np.array(cfg.TRAIN.BBOX_NORMALIZE_MEANS), (self._num_classes))
self._predictions["bbox_pred"] *= stds
self._predictions["bbox_pred"] += means
else:
self._add_losses()
layers_to_output.update(self._losses)
val_summaries = []
with tf.device("/cpu:0"):
val_summaries.append(self._add_gt_image_summary())
for key, var in self._event_summaries.items():
val_summaries.append(tf.summary.scalar(key, var))
for key, var in self._score_summaries.items():
self._add_score_summary(key, var)
for var in self._act_summaries:
self._add_act_summary(var)
for var in self._train_summaries:
self._add_train_summary(var)
self._summary_op = tf.summary.merge_all()
self._summary_op_val = tf.summary.merge(val_summaries)
layers_to_output.update(self._predictions)
return layers_to_output
def get_variables_to_restore(self, variables, var_keep_dic):
raise NotImplementedError
def fix_variables(self, sess, pretrained_model):
raise NotImplementedError
# Extract the head feature maps, for example for vgg16 it is conv5_3
# only useful during testing mode
def extract_head(self, sess, image):
feed_dict = {self._image: image}
feat = sess.run(self._layers["head"], feed_dict=feed_dict)
return feat
def test_image(self, sess, image, im_info):
feed_dict = {self._image: image,
self._im_info: im_info}
# resultss = sess.run("rpn_conv/3x3", feed_dict=feed_dict)
# print(resultss)
# for i in range(64):
# show_img = resultss[:, :, :, i] # print type(show_img)
# plt.subplot(4, 8, i + 1)
# plt.imshow(show_img, cmap='gray')
# plt.axis('off')
# plt.show()
cls_score, cls_prob, bbox_pred, rois = sess.run([self._predictions["cls_score"],
self._predictions['cls_prob'],
self._predictions['bbox_pred'],
self._predictions['rois']],
feed_dict=feed_dict)
###下面就是提取变量加上绘图了。
asd = sess.run(self._bb, feed_dict=feed_dict)
print(asd.shape[0])
print(asd.shape[1])
print(asd.shape[2])
print(asd.shape[3])
for i in range(10):
show_img = asd[:, :, :, i]
# print type(show_img)
show_img.shape = [asd.shape[1], asd.shape[2]]
plt.imshow(show_img, cmap='jet')
plt.axis('off')
plt.show()
##
# print(aa)
##
return cls_score, cls_prob, bbox_pred, rois
def get_summary(self, sess, blobs):
feed_dict = {self._image: blobs['data'], self._im_info: blobs['im_info'],
self._gt_boxes: blobs['gt_boxes']}
summary = sess.run(self._summary_op_val, feed_dict=feed_dict)
return summary
def train_step(self, sess, blobs, train_op):
feed_dict = {self._image: blobs['data'], self._im_info: blobs['im_info'],
self._gt_boxes: blobs['gt_boxes']}
rpn_loss_cls, rpn_loss_box, loss_cls, loss_box, loss, _ = sess.run([self._losses["rpn_cross_entropy"],
self._losses['rpn_loss_box'],
self._losses['cross_entropy'],
self._losses['loss_box'],
self._losses['total_loss'],
train_op],
feed_dict=feed_dict)
return rpn_loss_cls, rpn_loss_box, loss_cls, loss_box, loss
def train_step_with_summary(self, sess, blobs, train_op):
feed_dict = {self._image: blobs['data'], self._im_info: blobs['im_info'],
self._gt_boxes: blobs['gt_boxes']}
rpn_loss_cls, rpn_loss_box, loss_cls, loss_box, loss, summary, _ = sess.run([self._losses["rpn_cross_entropy"],
self._losses['rpn_loss_box'],
self._losses['cross_entropy'],
self._losses['loss_box'],
self._losses['total_loss'],
self._summary_op,
train_op],
feed_dict=feed_dict)
return rpn_loss_cls, rpn_loss_box, loss_cls, loss_box, loss, summary
def train_step_no_return(self, sess, blobs, train_op):
feed_dict = {self._image: blobs['data'], self._im_info: blobs['im_info'],
self._gt_boxes: blobs['gt_boxes']}
sess.run([train_op], feed_dict=feed_dict)
如果你也是用这个版本的faster代码可以直接复制使用,在测试图像的时候就会自己蹦出特征图了。
如果不是,你可以参考如下的绘图代码:
def test_image(self, sess, image, im_info):
feed_dict = {self._image: image,
self._im_info: im_info}
# resultss = sess.run("rpn_conv/3x3", feed_dict=feed_dict)
# print(resultss)
# for i in range(64):
# show_img = resultss[:, :, :, i] # print type(show_img)
# plt.subplot(4, 8, i + 1)
# plt.imshow(show_img, cmap='gray')
# plt.axis('off')
# plt.show()
cls_score, cls_prob, bbox_pred, rois = sess.run([self._predictions["cls_score"],
self._predictions['cls_prob'],
self._predictions['bbox_pred'],
self._predictions['rois']],
feed_dict=feed_dict)
###下面就是提取变量加上绘图了。
asd = sess.run(self._bb, feed_dict=feed_dict)
print(asd.shape[0])
print(asd.shape[1])
print(asd.shape[2])
print(asd.shape[3])
for i in range(10):
show_img = asd[:, :, :, i]
# print type(show_img)
show_img.shape = [asd.shape[1], asd.shape[2]]
plt.imshow(show_img, cmap='jet')
plt.axis('off')
plt.show()
##
# print(aa)
##
return cls_score, cls_prob, bbox_pred, roistensorflow里面要用在会话里面run一下,tensor才有取值,所以我首先是把RPN的输入那一层的卷积操作保存了下来,命名为self._bb,然后run出来是asd,随便命名的,不太好。然后数据流到这个位置就会得到asd的取值了。上面绘图程序的print[0]到[3]是我打印出来前几张特征图看了一下,后面写了个for循环,将前10个特征图放到同一个画布上显示,实际上rpn输入的特征图数量如果是resnet101的话应有有512张对吧,随便大家改。