「干货」2019 CVPR 无人驾驶资源帖
来看看年度计算机视觉盛会CVPR,在刚过去的几天,CVPR 2019发布接收论文ID列表,统计了下大概1300篇paper被接收,接受率为25.2%,不知道各位同学的论文是否上榜,
好了今天我们整理了Autopilot方面的论文以及源码,自动驾驶目前是最前沿的研究课题,但难度也是巨大的,各位同学还需努力。

下面是Imalg整理的会议上与无人驾驶相关的优秀论文及项目源码,希望对广大从事自动驾驶视觉开发的同学有所帮助。
Title:Pseudo-LiDAR from Visual Depth Estimation: Bridging the Gap in 3D Object Detection for Autonomous Driving(伪激光雷达)
Author:Yan Wang, Wei-Lun Chao, Divyansh Garg, Bharath Hariharan, Mark Campbell, Kilian Q. Weinberger
论文链接:https://arxiv.org/abs/1812.07179
项目链接:https://mileyan.github.io/pseudo_lidar/
代码链接:https://github.com/mileyan/pseudo_lidar

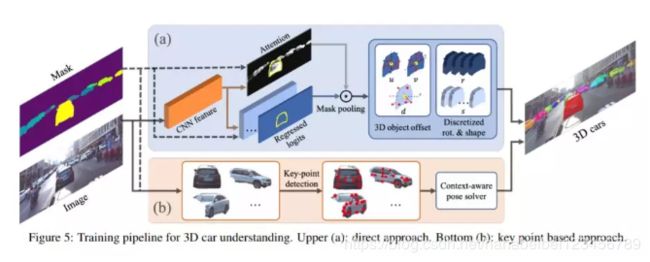
Title:ApolloCar3D: A Large 3D Car Instance Understanding Benchmark for Autonomous Driving(数据集)
Author:Xibin Song, Peng Wang, Dingfu Zhou, Rui Zhu, Chenye Guan, Yuchao Dai, Hao Su, Hongdong Li, Ruigang Yang
论文链接:https://arxiv.org/abs/1811.12222
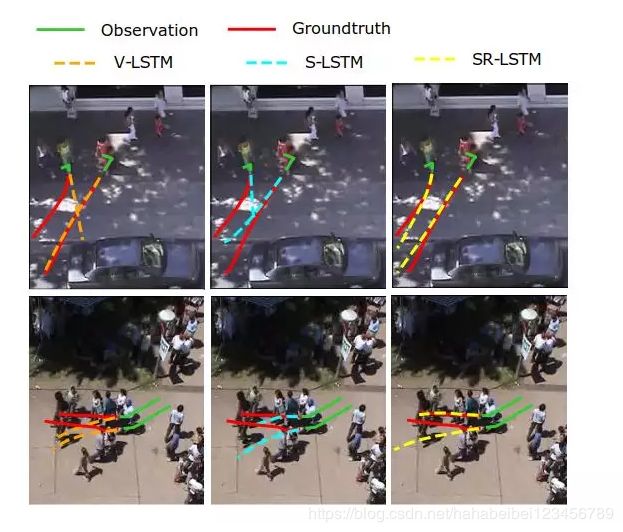
Title:SR-LSTM: State Refinement for LSTM towards Pedestrian Trajectory Prediction(行人预测)
Author:Pu Zhang, Wanli Ouyang, Pengfei Zhang, Jianru Xue, Nanning Zheng
论文链接:https://arxiv.org/abs/1903.02793
Title:Selective Sensor Fusion for Neural Visual-Inertial Odometry(视觉惯性测距)
Author:Changhao Chen, Stefano Rosa, Yishu Miao, Chris Xiaoxuan Lu, Wei Wu, Andrew Markham, Niki Trigoni
论文链接:https://arxiv.org/abs/1903.01534

Title:DeepMapping: Unsupervised Map Estimation From Multiple Point Clouds
Author:Li Ding, Chen Feng
论文链接:https://arxiv.org/abs/1811.11397
项目链接:https://ai4ce.github.io/DeepMapping/

Title:Stereo R-CNN based 3D Object Detection for Autonomous Driving
Author:Peiliang Li, Xiaozhi Chen, Shaojie Shen
研究机构:香港科技大学、大疆
论文下载链接:
https://arxiv.org/abs/1902.09738

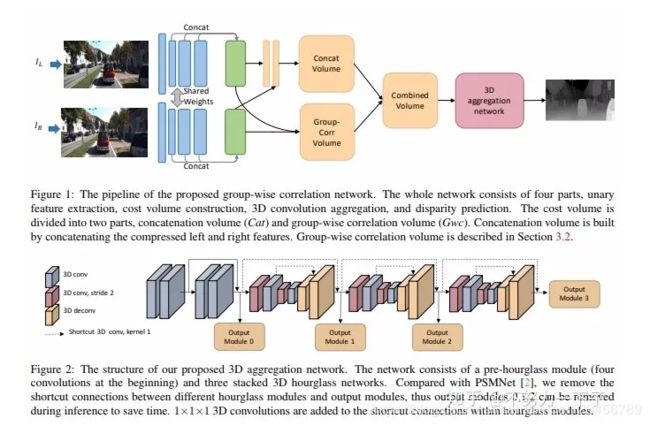
Title:Group-wise Correlation Stereo Network
Author:Xiaoyang Guo,Kai Yang,Wukui Yang,Xiaogang Wang,Hongsheng Li
团队:香港中文大学电子工程系、商汤科技
论文链接:https://arxiv.org/abs/1903.04025
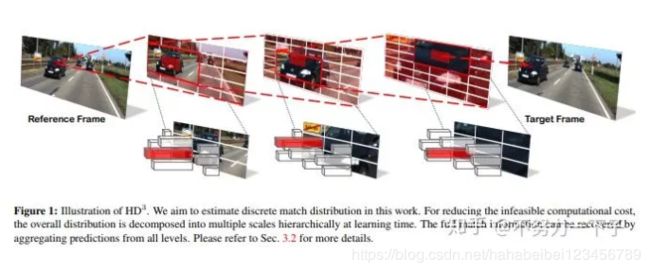
Title:Hierarchical Discrete Distribution Decomposition for Match Density Estimation
研究结构:伯克利DeepDrive
Author:Zhichao Yin
论文链接:https://arxiv.org/abs/1812.06264
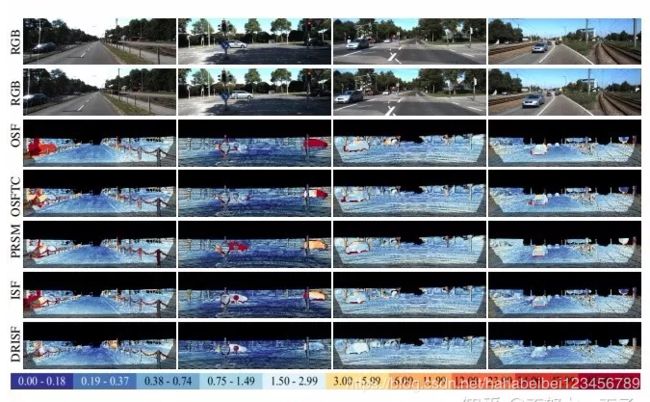
Title:Deep Rigid Instance Scene Flow
研究机构:Uber ATG部门、MIT、多伦多大学
Author:Wei-Chiu Ma 、Shenlong Wang 、Rui Hu、Yuwen Xiong、 Raquel Urtasun
论文链接:
https://people.csail.mit.edu/weichium/papers/cvpr19-drisf/paper.pdf
Title:MagicVO: End-to-End Monocular Visual Odometry through Deep Bi-directional Recurrent Convolutional Neural Network(单目视觉测距)
Author:Jian Jiao,Jichao Jiao,Yaokai Mo,Weilun Liu,Zhongliang Deng
研究结构: 北邮
论文链接:https://arxiv.org/abs/1811.10964

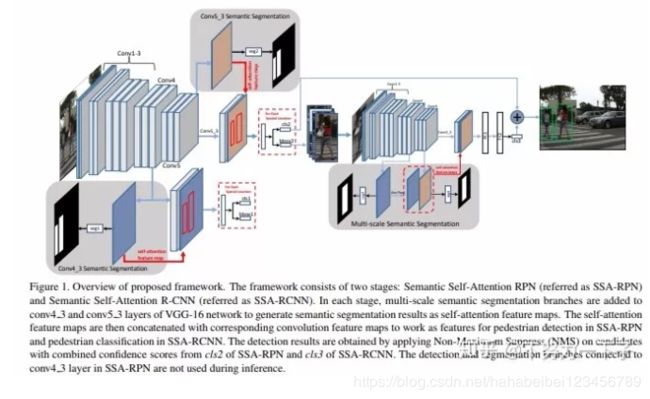
Title:SSA-CNN: Semantic Self-Attention CNN for Pedestrian Detection
Author:Chengju Zhou,Meiqing Wu,Siew-Kei Lam
研究机构:南洋理工大学
论文链接:https://arxiv.org/abs/1902.09080v1
最新车路协同相关资料下载:
链接: https://pan.baidu.com/s/1aSHKCke_Q02j_7jkHQhpZg 提取码: hvxw