如何使用OpenCV进行手写数字分类器C++/Python
在本教程中,我们将使用OpenCV构建一个简单的手写数字分类器。我们将共享用C ++和Python编写.
图像分类管道
本章节暂不讨论图像分类管道,大家可以自行搜索相关知识,下次我们补充。

我们将使用方向梯度直方图作为特征描述符和支持向量机(SVM)作为分类的机器学习算法。
使用OpenCV的光学字符识别(OCR)示例(C ++ / Python)
我想与代码共享一个示例,以使用HOG + SVM演示图像分类。与此同时,我希望尽可能保持简单,这样除了HOG和SVM之外我们不需要太多东西。这个灵感和数据来自OpenCV的教程在这里:
http://docs.opencv.org/trunk/dd/d3b/tutorial_py_svm_opencv.html
原始教程仅在Python中,并且由于一些奇怪的原因实现了它自己的简单HOG描述符。我们用OpenCV的HOG描述符替换了他们自己开发的HOG。
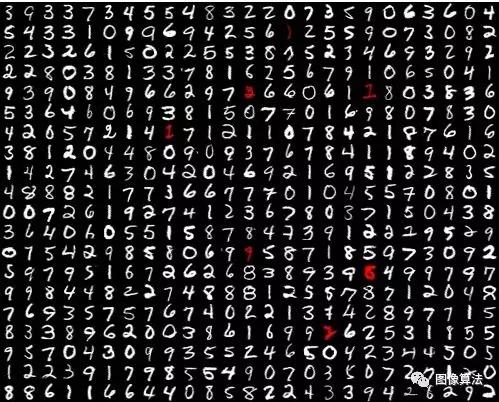
OCR的数字数据集
我们将使用上面的图像作为OpenCV样本附带的数据集。它共包含5000张图像 - 每个数字500张图像。每幅图像均为20×20灰度,背景为黑色。这些数字中的4500个将用于训练,其余500个将用于测试算法的性能。您可以点击上面的图片放大。
让我们完成构建和测试分类器所需的步骤。
第1步:纠偏(预处理)
人们通常将学习算法视为块框。在一端输入图像,在另一端输出结果。实际上,您可以稍微协助算法,并注意到性能的巨大提升。例如,如果您正在构建面部识别系统,则将图像与参考面对齐通常会导致性能的显着提高。典型的对准操作使用面部特征检测器来对准每个图像中的眼睛。
在构建分类器之前对齐数字同样会产生更好的结果。在面部的情况下,对准是相当明显的 - 您可以对面部图像应用相似变换,以将眼睛的两个角对准参考面的两个角。
歪斜的例子
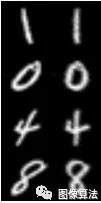
在手写数字的情况下,我们没有明显的特征,如我们可以用于对齐的眼角。然而,人们写作的明显变化是他们的写作倾向。有些作者有一个向右或向前的倾斜,其中数字向前倾斜,有些具有向后或向左倾斜,有些没有倾斜。我们可以通过修复这个垂直斜面来帮助算法,因此它不必学习数字的这种变化。左侧的图像显示第一列中的原始数字,并且它是倾斜(固定)版本。
可以使用图像矩来实现对简单灰度图像的这种偏斜校正。OpenCV有一个瞬间的实现,它在计算有用的信息时很方便,如质心,面积,黑色背景的简单图像的偏斜。
事实证明,偏斜的度量是由两个中心力矩(mu11 / mu02)的比率给出的。如此计算的偏度可以用于计算对图像进行校正的仿射变换。
偏移的代码如下:
C++
Mat deskew(Mat& img)
{
Moments m = moments(img);
if(abs(m.mu02) < 1e-2)
{
// No deskewing needed.
return img.clone();
}
// Calculate skew based on central momemts.
double skew = m.mu11/m.mu02;
// Calculate affine transform to correct skewness.
Mat warpMat = (Mat_(2,3) << 1, skew, -0.5*SZ*skew, 0, 1 , 0);
Mat imgOut = Mat::zeros(img.rows, img.cols, img.type());
warpAffine(img, imgOut, warpMat, imgOut.size(),affineFlags);
return imgOut;
} Python
def deskew(img):
m = cv2.moments(img)
if abs(m['mu02']) < 1e-2:
# no deskewing needed.
return img.copy()
# Calculate skew based on central momemts.
skew = m['mu11']/m['mu02']
# Calculate affine transform to correct skewness.
M = np.float32([[1, skew, -0.5*SZ*skew], [0, 1, 0]])
# Apply affine transform
img = cv2.warpAffine(img, M, (SZ, SZ), flags=cv2.WARP_INVERSE_MAP | cv2.INTER_LINEAR)
return img步骤2:计算定向梯度直方图(HOG)描述符
在此步骤中,我们将使用HOG特征描述符将灰度图像转换为特征向量。
我们发现理论与实践之间存在巨大差距。获取知识很容易。我可以阅读论文和书籍。如果我们不理解这个概念或数学,我们可以阅读更多的论文和书籍。这很容易。将这些知识付诸实践的难点。部分原因是很多这些算法在繁琐的手动操作之后起作用,并且如何设置正确的参数并不明显。例如,在Harris角点检测器中,为什么自由参数k设置为0.04?为什么不是1或2或0.34212呢?为什么42是生命,宇宙和一切的答案?
随着我获得更多真实世界的经验,我意识到在某些情况下你可以做出有根据的猜测,但在其他情况下,没有人知道为什么。人们经常进行参数扫描 - 他们以原则方式改变不同的参数,以查看产生最佳结果的因素。有时,最好的参数有一个直观的解释,有时他们没有。
牢记这一点,让我们看看为我们的HOG描述符选择了哪些参数。我们也会尝试解释为什么它们有意义,但我会提供有力的手工操作而不是严格的证据!
C++
HOGDeor hog(
Size(20,20), //winSize
Size(10,10), //blocksize
Size(5,5), //blockStride,
Size(10,10), //cellSize,
9, //nbins,
1, //derivAper,
-1, //winSigma,
0, //histogramNormType,
0.2, //L2HysThresh,
1,//gammal correction,
64,//nlevels=64
1);//Use signed gradientsPython
winSize = (20,20)
blockSize = (10,10)
blockStride = (5,5)
cellSize = (10,10)
nbins = 9
derivAperture = 1
winSigma = -1.
histogramNormType = 0
L2HysThreshold = 0.2
gammaCorrection = 1
nlevels = 64
signedGradients = True
hog = cv2.HOGDeor(winSize,blockSize,blockStride,cellSize,nbins,derivAperture,winSigma,histogramNormType,L2HysThreshold,gammaCorrection,nlevels, useSignedGradients)我们不打算来形容derivAperture,winSigma,histogramNormType,L2HysThreshold,伽玛校正和NLEVELS,因为我从来没有在使用HOG描述符来改变这些参数。除非您仔细阅读原始HOG文件,否则我建议您使用默认值。让我们探讨其他参数的选择。
winSize:此参数设置为20×20,因为我们的数据集中的数字图像的大小是20×20,我们想要为整个图像计算一个描述符。
cellSize:我们的数字是20×20灰度图像。换句话说,我们的图像由20×20 = 400个数字表示。描述符的大小通常远小于图像中的像素数。基于进行分类的重要特征的尺度来选择cellSize。一个非常小的cellSize会炸掉特征向量的大小,而一个非常大的cellSize可能无法捕获相关信息。您应该使用本文中共享的代码自行测试。我们在本教程中选择了10×10的cellSize。我们可以选择8吗?是的,那也行得通。
blockSize:块的概念存在以解决照明变化。较大的块大小使本地更改不太重要,而较小的块大小权重本地更改更多。通常,blockSize设置为2 x cellSize,但在我们的数字分类示例中,照明并不是一个挑战。在我的实验中,10×10的blockSize给出了最好的结果。
blockStride:blockStride确定相邻块之间的重叠并控制对比度标准化程度。通常,blockStride设置为blockSize的50%。
nbins:nbins设置渐变直方图中的bin数。HOG论文的作者建议使用值9来捕获0到180度之间的渐变,以20度为增量。在我的实验中,将此值增加到18并没有产生任何更好的结果。
signedGradients:通常,渐变可以具有0到360度之间的任何方向。这些梯度被称为“有符号”梯度,而不是“无符号”梯度,它们使符号下降并取0到180度之间的值。在原始HOG纸中,无符号梯度用于行人检测。在我的实验中,对于这个问题,签名渐变产生了稍好的结果。
上面定义的HOG描述符可用于使用以下代码计算图像的HOG特征。
C++
// im is of type Mat
vector deors;
hog.compute(im,deor); Python
deor = hog.compute(im)对于我们选择的参数,该描述符的大小为81×1。
第3步:训练模型(又称学习分类器)
在此之前,我们已经对原始图像进行了校正,并为我们的图像定义了描述符。这使我们能够将数据集中的每个图像转换为大小为81×1的向量。
我们现在准备训练一个模型,对我们训练集中的图像进行分类。为此,我们选择了支持向量机(SVM)作为我们的分类算法。虽然SVM背后的理论和数学涉及并超出了本教程的范围,但它的工作原理非常直观且易于理解。您可以查看我之前解释线性SVM的帖子。
要快速回顾一下,如果在n维空间中有点并且类标签附加到点,则线性SVM将使用平面划分空间,使得不同的类位于平面的不同侧。在下图中,我们有两个由红色和蓝色圆点表示的类。如果将此数据输入到线性SVM中,则可以通过查找明确区分这两个类的行来轻松构建分类器。有许多行可以分离这些数据。SVM选择处于任一类的最大距离数据点的那个。

与我们的数字分类问题相比,上图中显示的两类示例可能看起来很简单,但在数学上它们非常相似。我们的图像描述符不是二维空间中的点,而是81维空间中的点,因为它们由81×1向量表示。附加到这些点的类标签是图像中包含的数字,即0,1,2,... 9.而不是2D中的线,SVM将在高维空间中找到超平面来进行分类。
SVM参数C.
在训练SVM时您需要了解的两个常见参数之一称为C.真实世界数据不像上面所示那样干净。有时,训练数据可能有错误标记的示例。在其他时候,一组的一个例子在外观上可能与另一个例子太接近。例如,手写数字2可能看起来像3。
在下面的动画中,我们创建了这个场景。请注意,蓝点太靠近红色簇。选择默认值C = 1时,蓝点被错误分类。为C选择值100将其正确分类。
但是现在由黑线代表的决策边界太接近其中一个类。您是否愿意选择C为1,其中一个数据点被错误分类,但类之间的分离要好得多(减去一个数据点)?参数C允许您控制此权衡。
那么,你如何选择C?我们选择在提供的测试集上提供最佳分类的C. 该组中的图像未用于训练。
SVM参数Gamma:非线性SVM
你注意到了,我偷了几次“线性”这个词?在分类任务中,如果包含数据的空间可以使用平面(或2D中的线)进行分区以分隔类,则由多个类组成的数据集称为线性可分。
如果数据不是线性可分的怎么办?下图显示了使用红色和蓝色点的两个类,这些点不是线性可分的。您无法在平面上绘制一条线来分隔这两个类。使用黑线表示的良好分类器更像是一个圆圈。
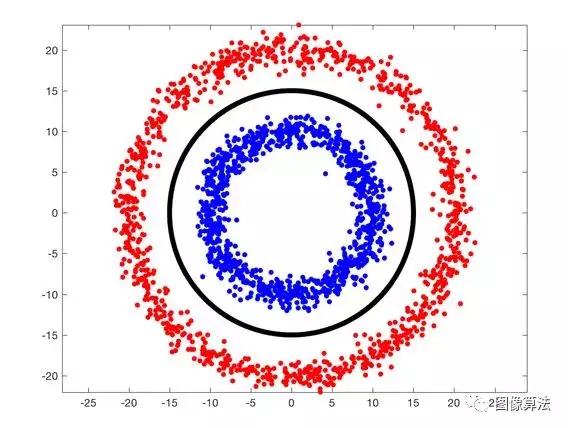
在现实生活中,数据是混乱的,而不是线性可分的。
我们还可以使用SVM吗?答案是肯定的!
为此,您使用了一种称为Kernel Trick的技术。这是一个巧妙的技巧,可将非线性可分离数据转换为线性可分离数据。在我们的示例中,红色和蓝色点位于2D平面上。让我们使用以下等式为所有数据点添加第三维。

如果您听过人们使用带有高斯核的奇异项径向基函数(RBF),他们只是在谈论上面的等式。RBF只是一个实值函数,它仅取决于与原点的距离(即仅取决于)。的高斯核是指上式的高斯形式。更一般地,RBF可以具有不同种类的内核。你可以在这里看到其中一些。
![]()
因此,我们根据其他两个维度中的数据制作了第三维。下图显示了这个三维(x,y,z)数据。我们可以看到它可以被包含黑色圆圈的平面分开!
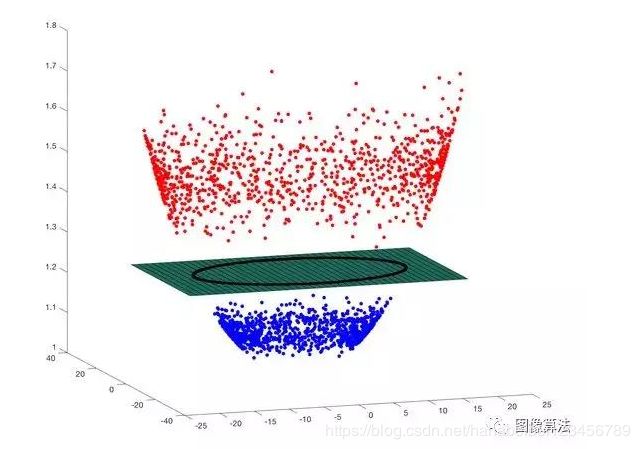
参数Gamma(\伽玛)控制第三维中的数据拉伸。它有助于分类,但也会扭曲数据。像金发姑娘一样,你必须选择这个参数“恰到好处”。这是人们在训练SVM时选择的两个重要参数之一。
有了这些知识,我们现在准备使用OpenCV训练SVM。
使用OpenCV训练和测试SVM
在幕后,OpenCV使用LIBSVM。OpenCV 2.4.x中的SVM仍然使用C API。幸运的是,从3.x开始,OpenCV现在使用了更好的C ++ API。以下是在C ++和Python中使用OpenCV设置SVM的方法。
C++
// Set up SVM for OpenCV 3
Ptr svm = SVM::create();
// Set SVM type
svm->setType(SVM::C_SVC);
// Set SVM Kernel to Radial Basis Function (RBF)
svm->setKernel(SVM::RBF);
// Set parameter C
svm->setC(12.5);
// Set parameter Gamma
svm->setGamma(0.50625);
// Train SVM on training data
Ptr td = TrainData::create(trainData, ROW_SAMPLE, trainLabels);
svm->train(td);
// Save trained model
svm->save("digits_svm_model.yml");
// Test on a held out test set
svm->predict(testMat, testResponse); Python
# Set up SVM for OpenCV 3
svm = cv2.ml.SVM_create()
# Set SVM type
svm.setType(cv2.ml.SVM_C_SVC)
# Set SVM Kernel to Radial Basis Function (RBF)
svm.setKernel(cv2.ml.SVM_RBF)
# Set parameter C
svm.setC(C)
# Set parameter Gamma
svm.setGamma(gamma)
# Train SVM on training data
svm.train(trainData, cv2.ml.ROW_SAMPLE, trainLabels)
# Save trained model
svm->save("digits_svm_model.yml");
# Test on a held out test set
testResponse = svm.predict(testData)[1].ravel()自动训练SVM
可以想象,选择正确的SVM参数C和Gamma可能非常耗时。幸运的是,OpenCV 3.x C ++ API提供了一个功能,可以自动为您执行此超参数优化,并提供最佳的C和Gamma值。在上面的代码中,您可以将svm-> train(td)更改为以下内容
svm->trainAuto(td);
这种训练可能需要很长时间(比svm->训练多5倍),因为它基本上是多次训练。
OpenCV SVM错误
我们在使用OpenCV SVM时遇到了两个错误。第一个是确认的,但另外两个不是。
SVM模型不会在Python API中加载。如果您使用的是Python,您刚刚保存的训练有素的SVM模型将无法加载!错误修复会来吗?不!检查出来这里
trainAuto似乎没有通过Python API公开。
带有RBF内核的SVM在iOS / Android中不起作用。很高兴被证明是错误的,但在移动平台(iOS / Android)上,我们无法使用受RBF内核训练的SVM。SVM响应始终相同。线性SVM模型工作得很好。
结果
经过训练和一些超参数优化,我们在数字分类上达到了98.6%!不是,只需几秒钟的培训就不好了。
在训练集中的500个图像中,有7个被错误分类。图像及其错误分类的标签如下所示。就像父亲看着他孩子的错误一样,我想说的是这些错误是可以理解的。

源码地址关注微信公众号:“图像算法”或者微信搜索账号imalg_cn关注公众号 回复数字分类器