OpenCV图像的阈值化
图像阈值化的基本思想是,给定一个数组和一个阈值,然后根据数组中每个元素是低于还是高于阈值而进行一些处理。
cvThreshold()函数如下:
double cvThreshold(CvArr* src, CvArr* dst, double threshold, double max_value, int threshold_type);cvShold函数只能处理8位或者浮点灰度图像,目标图像必须与源图像一致,或者为8为图像 。
实现阈值化的代码如下:
#include
#include
#pragma comment(lib, "ml.lib")
#pragma comment(lib, "cv.lib")
#pragma comment(lib, "cvaux.lib")
#pragma comment(lib, "cvcam.lib")
#pragma comment(lib, "cxcore.lib")
#pragma comment(lib, "cxts.lib")
#pragma comment(lib, "highgui.lib")
#pragma comment(lib, "cvhaartraining.lib")
int main()
{
IplImage* sourceImage;
IplImage* dstImage;
if(!(sourceImage = cvLoadImage("D:\\Testing_Images\\view.png")))
return -1;
dstImage = cvCreateImage(cvGetSize(sourceImage), sourceImage->depth, 1);
IplImage* r = cvCreateImage(cvGetSize(sourceImage), IPL_DEPTH_8U, 1);
IplImage* g = cvCreateImage(cvGetSize(sourceImage), IPL_DEPTH_8U, 1);
IplImage* b = cvCreateImage(cvGetSize(sourceImage), IPL_DEPTH_8U, 1);
IplImage* tempImage = cvCreateImage(cvGetSize(sourceImage), IPL_DEPTH_8U, 1);
cvSplit(sourceImage, r, g, b, NULL);
cvAddWeighted(r, 1./3., g, 1./3., 0.0, tempImage);
cvAddWeighted(tempImage, 1, b, 1./3., 0.0, tempImage);
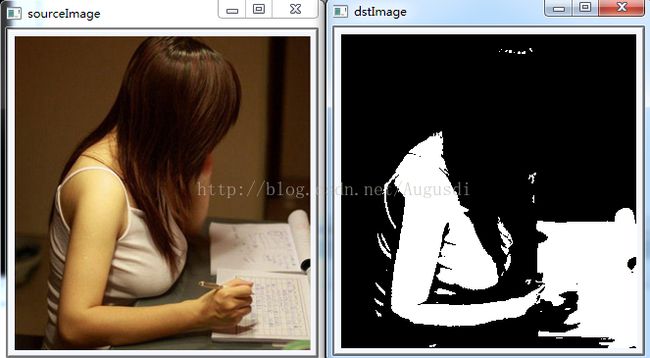
cvThreshold(tempImage, dstImage, 100, 255, CV_THRESH_BINARY);
// 对于大于100的设为255
cvNamedWindow("sourceImage");
cvNamedWindow("dstImage");
cvShowImage("sourceImage",sourceImage);
cvShowImage("dstImage",dstImage);
cvWaitKey(-1);
cvReleaseImage(&r);
cvReleaseImage(&g);
cvReleaseImage(&b);
cvDestroyWindow("sourceImage");
cvDestroyWindow("dstImage");
cvReleaseImage(&sourceImage);
cvReleaseImage(&dstImage);
return 0;
} 
在自适应阈值中,阈值本身就是一个变量,实现自适应阈值的代码如下:
#include
#include
#pragma comment(lib, "ml.lib")
#pragma comment(lib, "cv.lib")
#pragma comment(lib, "cvaux.lib")
#pragma comment(lib, "cvcam.lib")
#pragma comment(lib, "cxcore.lib")
#pragma comment(lib, "cxts.lib")
#pragma comment(lib, "highgui.lib")
#pragma comment(lib, "cvhaartraining.lib")
int main()
{
IplImage* sourceImage;
//直接以灰度图像载入
if(!(sourceImage = cvLoadImage("D:\\Testing_Images\\view.png", CV_LOAD_IMAGE_GRAYSCALE)))
return -1;
IplImage* dstImage = cvCreateImage(cvGetSize(sourceImage), IPL_DEPTH_8U, 1);
//这个函数只能处理单通道图像或者8位图像,并且要求源图像 与目标图像不能为同一个图像
cvAdaptiveThreshold(
sourceImage,
dstImage,
255, //max_val
CV_ADAPTIVE_THRESH_MEAN_C,
CV_THRESH_BINARY,
3, //block_size
5 //offset
);
cvNamedWindow("AdaptiveThreshold", 0);
cvShowImage("AdaptiveThreshold", dstImage);
//单一阈值
IplImage *dstImage2 = cvCreateImage(cvGetSize(sourceImage), IPL_DEPTH_8U, 1);
cvThreshold(sourceImage, dstImage2, 100, 255, CV_THRESH_BINARY);
cvNamedWindow("sourceImage", 0);
cvNamedWindow("Threshold", 0);
cvShowImage("sourceImage", sourceImage);
cvShowImage("Threshold", dstImage2);
cvWaitKey(-1);
//释放资源
cvDestroyWindow("sourceImage");
cvDestroyWindow("Threshold");
cvDestroyWindow("AdaptiveThreshold");
cvReleaseImage(&sourceImage);
cvReleaseImage(&dstImage);
cvReleaseImage(&dstImage2);
return 0;
} 