一颗MCU可以搞定无人机的电机驱动+飞控算法!

i.MX RT跨界处理器具有实时操作和应用处理器级的功能,其已经实际应用在智能交互、工厂自动化、智能支付终端、语音处理和语音识别等领域,这些应用场景已经足以证明i.MX RT的强大与广泛的适应性。
除了前述的应用方向之外,今天小编再为大家介绍一个典型的应用场景——无人机。
玩无人机的小伙伴们都知道,四旋翼无人机的BLDC电调电机,通常需要单独的MCU进行控制,如果用更加节能的FOC控制方式,那么对MCU的性能要求就比较高。一般讲,这颗MCU除去控制电机外,还会处理一些其它事情并留有余量,所以生产无人机的厂商,大都喜欢用Cortex-M4的MCU来做FOC控制(NXP的高主频+硬件除法器的M0+也完全可以胜任),也就是四旋翼无人机需要四颗较高性能的MCU,来分别控制四个电机。
除此之外,还需要一个至少是Cortex-M4级别的MCU做飞控,它需要读取传感器数据、控制飞行姿态、完成通讯等任务。
所有这些控制和操作,现在用一颗i.MX RT就都可以搞定了。i.MX RT性能强悍,以Cortex-M7为内核,主频高达600MHz,片内512KB RAM,同时具有4组PWM模块、适合多电机模拟信号采样的ADC_ETC模块,及丰富灵活的通讯接口,所以搞定飞控+4个BLDC电机控制自然不在话下。
我们接触到很多使用i.MX RT做无人机的实例,下面为各位展示两个优秀的方案。
基于i.MX RT1052的飞行学习板
这是一个由ZLG技术研发中心设计的,“4个无刷电机FOC驱动 + 飞控算法”的单芯片解决方案,按竞赛级设计,有实力在无人机飞行大赛上争金夺银的!
其中的ZLG-Soar飞控软件库具有如下特点:
采用四元数互补滤波融合算法,和基于角速度环与角度环的串级PID姿态控制算法,在i.MX RT下控制频率可达2KHz(一般飞控频率为0.5KHz)。
支持自动校准功能,支持9轴或6轴IMU(惯量测量传感器)。
支持SBUS航模串口协议,适用于支持该协议的任意无线收发器。
支持常用的IIC/SPI/UART接口,可以扩展不同的传感器。
飞行学习板可以通过蓝牙模块,使用NXP的FreeMaster软件边飞边进行参数的调试。
提供的软件接口,可以让用户快速移植自己的飞控软件,或BetaFlight,ClenFlight,PX4,OpenPiliot,RaceFlight等软件。
下图是i.MX RT飞行学习板的真身!产品级软硬件设计,既可直接用于无人机,也可用于多电机FOC的应用评估,例如稳拍器、机器人、工业缝纫机等等。

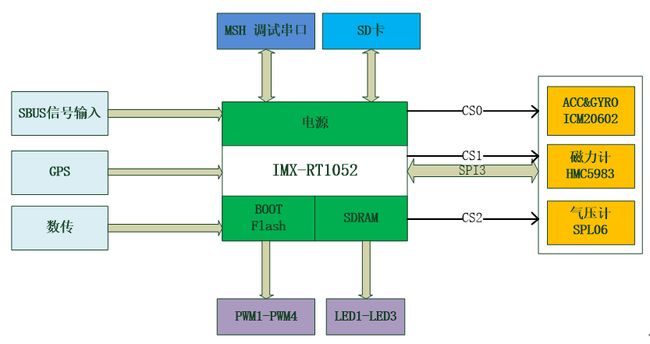
下图则是i.MX RT飞行学习板的电路结构:
核心是i.MX RT1052跨界处理器;
外接4路功率模块,用无感FOC算法驱动4个无刷电机;
外扩IMU传感器和气压计,可同时运行飞行控制算法;
同时预留了4个油门脉冲接口,可外接飞行控制器,学习板仅作为“4无刷电机FOC驱动”使用。默认整机7-12V/16A,可根据需求修改。

i.MX RT飞行学习板,提供多种配套软件,包括:ZLG-FOC电机库、简易飞行控制算法、i.MX RT外设基础例程等。用户可快速搭建无人机产品,或其他多电机FOC的产品,例如稳拍器、机器人、工业缝纫机、IoT创新产品等等。
关于此方案的更详细信息,请参看原文:
《i.MX RT飞行学习板--没错,真的可以飞!》
基于i.MX RT1052的开源AutoQuad飞控
这是一位网络牛人(姑且称他为老J)参加RT-Thread应用作品征集赛的一个作品。
AutoQuad是德国的一款老牌开源飞控(硬件闭源),其旨在提供稳定、动态飞行和自动驾驶功能的飞控控制器。
由于AutoQuad硬件闭源的特性,国内的玩家很少,但AutoQuad 的ukf算法“独步天下”,绝对是一绝。15年时老J自己做出了Autoquad的M4版本硬件,并可以运行官方源码。
2017年时他又将Autoquad移植到MDK环境下,并且将其RTOS替换为RT-Thread。后续玩这个玩了蛮久时间。他的体会是这个版本的AutoQuad由于UKF算法占用了很多CPU资源,使得整个系统CPU占用率太高,再者就是片内RAM资源捉襟见肘。
对于这个版本的AutoQuad目前有挺多模友想继续深入的开发,比如网名为“我的世界观”的网友,想将L1自适应控制算法加入到其中,但这个L1自适应算法也是极耗费CPU资源的。在这个背景下,老J开始着手了AutoQuad在i.MX RT1052上的实现,以期留出足够的资源来给模友们做深入开发,同时也借机熟悉下RT-Thread的3.x版本。
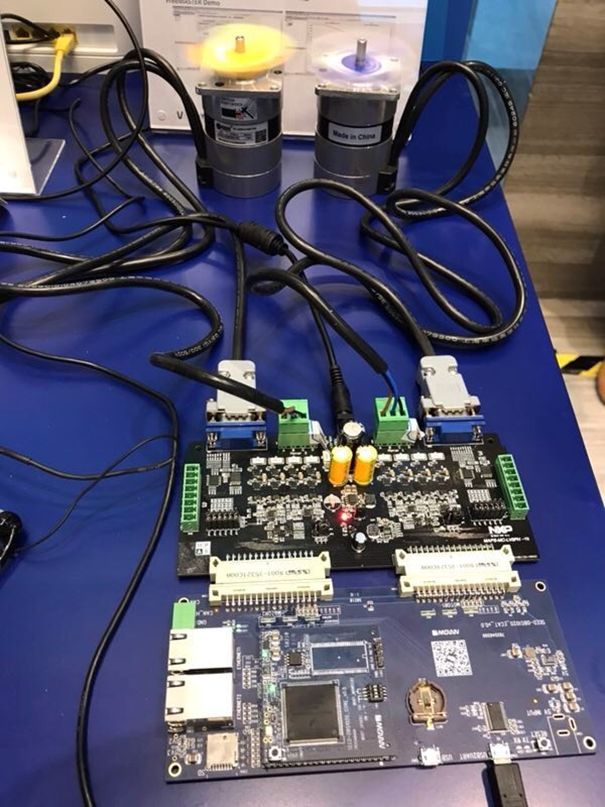
硬件板子目前基于野火1052 mini开发板,传感器是从马家买的现成模块,采用飞线的形式固定在开发板上(后期会重新设计一款小的适合飞控的板子)。


全部的连接都使用飞线

完成后的效果
系统框图如下
本设计的特点是:
首先,作者对AutoQuad非常熟悉,已经清楚地看到了软件对CPU高性能,与对大容量RAM的要求。刚好i.MX RT可以在这两方面满足他的升级要求。
其次,作者使用了现成的实时操作系统——RT-Thread,及其RT-Thread在i.MX RT上的现成BSP,依托i.MX RT丰富的外设接口和RT-Thread提供的标准设备驱动框架,能够快速地移植整个软件系统到i.MX RT平台上。
第三,整个硬件环境尤其是主控板,采用了现成的野火开发板,省却了研究适配开发i.MX RT1052硬件平台的时间和精力。
关于该设计的详细信息,可以参看原文:
《基于RT-Thread和i.MX RT1052的开源AutoQuad飞控》
NXP在i.MX RT105x上的方案
以上两个方案都是充分地利用了i.MX RT1052的高性能、多端口和方便开发的特性,用一颗MCU实现了以前需要4-5颗MCU,甚至更多MCU,才能实现的功能,大大地简化了硬件系统的复杂度,即降低了总体成本又缩小了系统的整体尺寸,同时减小了重量和功耗,进一步提高了无人机的性价比。
目前NXP还没有在i.MX RT上的专用无人机方案,在多电机应用方面,有一个单片i.MX RT同时驱动三个电机的机械臂方案,如下图所示:

接下来会通过摄像头实时自动地识别物体,再直接驱动机械臂执行动作,所有这些也将会通过i.MX RT实现。
i.MX RT电机控制第三方学习板预告
恩智浦有个MAPS学习评估板系列,是按照原来的TOWER板重新设计的,目前有广受客户欢迎的MAPS-DSC系列,同时支持双电机的伺服或步进。
如果需要评估i.MX RT的电机控制性能,除了官方发布的评估板之外,第三方合作伙伴正在建造中的MAPS-RT是个非常实用的评估板,不但支持伺服或步进电机,还可以支持工业中广泛使用的EtherCAT(与友商合作),值得期待。

![]()
1.大牛说他这样阅读STM32参考手册。。。
2.新版IAR调试查看寄存器问题和STM8代码大小优化问题,本文来解决!
3.适用于STM32的五大嵌入式操作系统,你选哪个?
4.需求大还缺货,国产MCU为何仍受投资界“冷落”?
5.华为22年,49岁,然而他一直在编码!
6.开源的本质是什么,免费还是自由?
免责声明:本文系网络转载,版权归原作者所有。如涉及作品版权问题,请与我们联系,我们将根据您提供的版权证明材料确认版权并支付稿酬或者删除内容。