最短路算法总结
一、负权图
在一个图里每条边都有一个权值(有正有负),如果存在一个环(从某个点出发又回到自己的路径),而且这个环上所有权值之和是负数,那这就是一个负权环,也叫负权回路。存在负权回路的图是不能求两点间最短路的,因为只要在负权回路上不断兜圈子,所得的最短路长度可以任意小。(没有最短路)
单源点的最短路径问题是指:给定一个加权有向图G和源点s,对于图G中的任意一点v,求从s到v的最短路径。
二、最短路
1、Bellman-Ford算法
2、Dijkstra算法(代码以邻接矩阵为例) && Dijkstra + 优先队列的优化(也就是堆优化)
3、floyd-Warshall算法(代码以邻接矩阵为例)
4、SPFA(代码以前向星为例)
5、BFS求解最短路
最短路径的估计值:我们的源点用s表示。在这里我们用数组dis[N]来存储最短路径,dis[N]数组为源点到其他点的最小距离。那么最最开始的最短路径的估计值也就是对dis[N]的初始化。一般我们的初始化都是初始化为 dis[N]= +∞,源点是要初始化为0的,dis[s] = 0,因为s—>s的距离为0;
三、Bellman-Ford
Bellman-Ford算法是求解单源最短路径问题的一种算法。可以判断有无负权回路(若有,则不存在最短路),时效性较好,时间复杂度O(VE)。与Dijkstra算法不同的是,在Bellman-Ford算法中,边的权值可以为负数。设想我们可以从图中找到一个环路(即从v出发,经过若干个点之后又回到v)且这个环路中所有边的权值之和为负。那么通过这个环路,环路中任意两点的最短路径就可以无穷小下去。如果不处理这个负环路,程序就会永远运行下去。而Bellman-Ford算法具有分辨这种负环路的能力。
3.1 Bellman-Ford算法的流程如下:
给定图G(V, E)(其中V、E分别为图G的顶点集与边集),源点s,·数组Distant[i]记录从源点s到顶点i的路径长度,初始化数组Distant[n]为inf, Distant[s]为0;
·以下操作循环执行至多n-1次,n为顶点数:
对于每一条边e(u, v),如果Distant[u] + w(u, v)
·为了检测图中是否存在负环路,即权值之和小于0的环路。对于每一条边e(u, v),如果存在Distant[u] + w(u, v)
可知,该算法寻找单源最短路径的时间复杂度为O(V*E)。
3.2 bellman-ford算法求最短路 C/C++版
//起点都从1开始,图采用临接矩阵保存
所用数据结构 :
struct node
{
int u, v, w;//u 为起点,v为终点,w为u—>v的权值
};
node edge[100];
bool Bellman_Ford(int s)
{
for(int i = 1; i <= node_num;i++) //初始化
dis[i] =inf;
dis[s]=0;
for(int i = 1; i < node_num; i++) //进行|V|-1次
for(int j = 1; j <=edge_num; j++) //每个边都判断一次
if(dis[edge[j].v] >dis[edge[j].u] + edge[j].cost) //对边松弛,边的起点到s的距离,经过该边是否可松弛
{
dis[edge[j].v] =dis[edge[j].u] + edge[j].cost; //dis[edge[j].v] 保存的是edge[j].v到源点的距离
pre[edge[j].v] =edge[j].u; //保存前驱,即edge[j].v得到这个最短距离的上一步走的是edge[j].u这个节点
}
bool flag = 1; //判断是否含有负权回路
for(int i = 1; i <=edge_num; i++)
if(dis[edge[i].v]> dis[edge[i].u] + edge[i].cost)
{
flag = 0;
break;
}
return flag;
}
四、Dijkstra(贪心策略)
求单源、无负权的最短路。时效性较好,时间复杂度为O(V*V+E)。当是稀疏图的情况时,此时E=V*V/lgV,所以算法的时间复杂度可为O(V^2)。若是斐波那契堆作优先队列的话,算法时间复杂度,则为O(V*lgV + E)。
因为dijstra是基于贪心策略的,每次出发都是从到源点最小权值的点开始,直到终点。而带负权边的可以从先通过一个不是从到源点最小权值的点开始,经过负权边使总权值变小,例如下面的图
1到2权值3,1到3权值4,3到2权值-2。Dijstra求出的是3,实际的为4-2=2。
4.1 迪杰斯特拉算法简介
迪杰斯特拉(dijkstra)算法是典型的用来解决最短路径的算法,也是很多教程中的范例,由荷兰计算机科学家dijkstra于1959年提出,用来求得从起始点到其他所有点最短路径。该算法采用了贪心的思想,每次都查找与该点距离最近的点,也因为这样,它不能用来解决存在负权边的图。解决的问题大多是这样的:有一个无向图G(V,E),边E[i]的权值为W[i],找出V[0]到V[i]的最短路径。
4.2 算法思想
1)初始化:设定除源节点以外的其它所有节点到源节点的距离为inf(一个很大的数),且这些节点都没被处理过。
2)从源节点出发,更新相邻节点到源节点的距离。然后在所有节点中选择一个最短距离的点作为当前节点。
3)标记当前节点为done(表示已经被处理过),与步骤2类似,更新其相邻节点的距离。(这些相邻节点的距离更新也叫松弛,目的是让它们与源节点的距离最小。因为你是在当前最小距离的基础上进行更新的,由于当前节点到源节点的距离已经是最小的了,那么如果这些节点之前得到的距离比这个距离大的话,我们就更新它)。
4)步骤3做完以后,设置这个当前节点已被done,然后寻找下一个具有最小代价(cost)的点,作为新的当前节点,重复步骤3.
5)如果最后检测到目标节点时,其周围所有的节点都已被处理,那么目标节点与源节点的距离就是最小距离了。如果想看这个最小距离所经过的路径,可以回溯,前提是你在步骤3里面加入了当前节点的最优路径前驱节点信息。
4.3 dijkstra是广度优先搜索算法吗
不是,扩展表的进行方式和广度优先不同。只是某处有点类似广度优先搜索。Dijkstra是从起点出发,遍历其起点的节点,记录到各子节点的位置,选择一条权值小的路,然后从这个子节点出发,到其中一个子节点,计算其到起点的距离,比较从原点出发所得距离最小的那个节点(没有子节点的就不比较了),从那个节点出发。得到距离后再比较,再从最小的节点出发。(而广度优先搜索是要遍历完一个节点的每一个子节点,然后在遍历完子节点的子节点。而Dijkstra每次从已遍历到节点中到起点距离最小的那个节点出发)(把广度优先搜索的队列里的数据换成权值低的先出队列就是dijkstra了)
4.4 Dijkstra算法
//用的是临接矩阵,自身到自身的距离为0。
1void dijkstra(int s,int t)
2{
3 bool vis[203];//标记该点是否访问过
4 int dis[203];//保存最短路径
5 int i, j, k;
6
7 for(i=0;i<n;i++)//初始化
8 dis[i] =G[s][i];//s—>各个点的距离,未直接连接的为inf
9 memset(vis,false,sizeof(vis));//初始化为假表示未访问过
10 dis[s] =0;//s->s距离为0
11 vis[s] =true;//s点访问过了,标记为真
12 for(i=1;i<n;i++)//G.V-1次操作+上面对s的访问 = G.V次操作
13 {
14 k =-1;
15 for(j=0;j
16 if(!vis[j] && (k==-1||dis[k]>dis[j]))//未访问过 && 是距离最小的(不会出现dis[-1])
17 k = j;
18 if(k == -1)//若图找不到则结束
19 break;//跳出循环
20 vis[k] =true;//将k点标记为访问过了(下面保证其周围所有的边都判断了)
21 for(j=0;j<n;j++)//松弛操作
22 if(!vis[j] && dis[j]>dis[k]+G[k][j])//该点未访问过 && 可以进行松弛
23 dis[j] = dis[k]+G[k][j];//j点的距离 大于当前点的距离+w(k,j)则松弛成功,进行更新
24 }
25 printf("%d\n",dis[t]==MAX?-1:dis[t]);//输出结果
26 }
五、Floyd-Warshall算法(Floyd-Warshall algorithm)(动态规划)
是解决任意两点间的最短路径的一种算法,可以正确处理有向图或负权的最短路径问题,同时也被用于计算有向图的传递闭包。Floyd-Warshall算法的时间复杂度为O(N3),空间复杂度为O(N2)。
5.1 算法描述
1)算法思想原理:
Floyd算法是一个经典的动态规划算法。用通俗的语言来描述的话,首先我们的目标是寻找从点i到点j的最短路径。从动态规划的角度看问题,我们需要为这个目标重新做一个诠释(这个诠释正是动态规划最富创造力的精华所在)
从任意节点i到任意节点j的最短路径不外乎2种可能,1是直接从i到j,2是从i经过若干个节点k到j。所以,我们假设Dis(i,j)为节点u到节点v的最短路径的距离,对于每一个节点k,我们检查Dis(i,k) + Dis(k,j)< Dis(i,j)是否成立,如果成立,证明从i到k再到j的路径比i直接到j的路径短,我们便设置Dis(i,j) = Dis(i,k) +Dis(k,j),这样一来,当我们遍历完所有节点k,Dis(i,j)中记录的便是i到j的最短路径的距离。
2).算法描述:
a.从任意一条单边路径开始。所有两点之间的距离是边的权,如果两点之间没有边相连,则权为无穷大。
b.对于每一对顶点 u 和 v,看看是否存在一个顶点 w使得从 u 到 w再到 v 比己知的路径更短。如果是更新它。
3).Floyd算法过程矩阵的计算----十字交叉法
5.2 Floyd-Warshall的原理是动态规划
设Di,j,k为从i到j的只以(1..k)集合中的节点为中间节点的最短路径的长度。若最短路径经过点k,则Di,j,k = Di,k,k-1 + Dk,j,k-1;若最短路径不经过点k,则Di,j,k = Di,j,k-1。因此,Di,j,k = min(Di,k,k-1 +Dk,j,k-1 , Di,j,k-1)。
在实际算法中,为了节约空间,可以直接在原来空间上进行迭代,这样空间可降至二维。
5.3 floyd程序
1void floyd()
2{
3 int i, j, k;
4
5 for(k=0;k
6 for(i=0;i
7 for(j=0;j
8 G[i][j] = min(G[i][j],G[i][k]+G[k][j]);
9 printf("%d\n",G[s][t]==MAX?-1:G[s][t]);
10 }
这段代码的基本思想就是:最开始只允许经过0号顶点进行中转,接下来只允许经过0和1号顶点进行中转……允许经过1~n号所有顶点进行中转,求任意两点之间的最短路程。用一句话概括就是:从i号顶点到j号顶点,只经过前k号点的最短路程。补充一下:对于floyd判断负环是否存在只需检查是否存在d[i][i]是负数的顶点i即可。
六、SPFA
是Bellman-Ford的队列优化,时效性相对好,时间复杂度O(kE),其中(k<
6.1 SPFA算法:
设立一个先进先出的队列用来保存待优化的结点,优化时每次取出队首结点u,并且用u点当前的最短路径估计值对离开u点所指向的结点v进行松弛操作,如果v点的最短路径估计值有所调整,且v点不在当前的队列中,就将v点放入队尾。这样不断从队列中取出结点来进行松弛操作,直至队列空为止。SPFA在形式上和广度(宽度)优先搜索非常类似,不同的是bfs中一个点出了队列就不可能重新进入队列,但是SPFA中一个点可能在出队列之后再次被放入队列,也就是一个点改进过其它的点之后,过了一段时间可能本身被改进(重新入队),于是再次用来改进其它的点,这样反复迭代下去。
6.2 SPFA是这样判断负环的
如果某个点进入队列的次数超过N次,则存在负环(SPFA无法处理带负环的图)。
6.3 SPFA适用场合
因为spfa是动态维护最短路,所以对于一个节点入队次数越少,他的时间复杂度就越小。也就是说,只要图越稀疏,spfa的时间复杂度就越低。所以,spfa适用于比较稀疏的图。在稠密图里spfa容易超时。spfa可以处理负权图,因为他是动态维护了最短路。所以用spfa时不需要考虑是否存在负边。spfa可以处理负环,需要注意的是,可以处理负环不代表他能求出有负环的图的最短路,他只是能判断是否存在负环。
与Dijkstra算法与Bellman-ford算法都不同,SPFA的算法时间效率是不稳定的,即它对于不同的图所需要的时间有很大的差别。在最好情形下,每一个节点都只入队一次,则算法实际上变为广度优先遍历,其时间复杂度仅为O(E)。另一方面,存在这样的例子,使得每一个节点都被入队(V-1)次,此时算法退化为Bellman-ford算法,其时间复杂度为O(VE)。
SPFA算法在负边权图上可以完全取代Bellman-ford算法,另外在稀疏图中也表现良好。但是在非负边权图中,为了避免最坏情况的出现,通常使用效率更加稳定的Dijkstra算法,以及它的使用堆优化的版本。通常的SPFA算法在一类网格图中的表现不尽如人意。
6.4 SPFA算法
1bool SPFA()
2{
3 int u;//从队列que中取出的数
4 int i;
5 queue<int >que;//队列
6 int dis[503];//保存最短距离
7 bool vis[503];//标记是否访问过
8 int flag[503];//记录点进入队列的次数
9
10 memset(flag,0,sizeof(flag));//初始化为0
11 memset(vis,false,sizeof(vis));//初始化
12 fill(dis,dis+n+1,MAX);//初始化
13 dis[1] =0;//从1开始
14 que.push(1);//将 1 放入队列
15 while(!que.empty()){//队列不为空
16 u = que.front();//从队列中取出一个数
17 que.pop();//删除此数
18 vis[u] =false;//标记为未访问过
19 for(i=1;i<=n;i++)//对所有的边判断(采用临接矩阵存储的,若是临接表就可直接判断存在的边)
20 {
21 if(dis[i]>dis[u]+G[u][i]){//进行松弛
22 dis[i] = dis[u]+G[u][i];//松弛成功
23 if(!vis[i]){//若点i未被访问过
24 vis[i] =true;//标记为访问过
25 flag[i]++;//入队列次数+1
26 if(flag[i]>=n)//若此点进入队列此数超过n次 说明有负环
27 return true;//有负环
28 que.push(i);//将此点放入队列
29 }
30 }
31 }
32 }
33 return
false;//没有负环
34 }
6.5 两个著名优化(SLF和LLL)
SPFA是按照 FIFO的原则更新距离的, 没有考虑到距离标号的作用. 实现中 SPFA 有两个非常著名的优化: SLF 和 LLL.
SPFA算法有两个优化算法 SLF和 LLL:
SLF:Small Label First策略,设要加入的节点是j,队首元素为i,若dist(j)< dist(i),则将j插入队首,否则插入队尾。
LLL:LargeLabel Last策略,设队首元素为i,每次弹出时进行判断,队列中所有dist值的平均值为x,若dist(i)>x则将i插入到队尾,查找下一元素,直到找到某一i使得dist(i)<=x,则将i出对进行松弛操作。
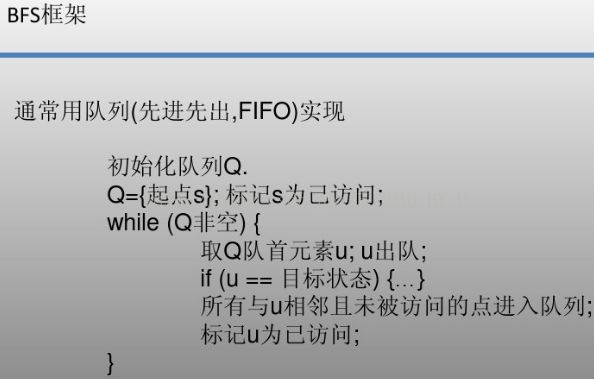
七、广度优先搜索
广度优先搜索算法(Breadth-First-Search),又译作宽度优先搜索,或横向优先搜索,简称BFS。简单的说,BFS是从根节点开始,沿着树的宽度遍历树的节点。如果所有节点均被访问,则算法中止。广度优先搜索的实现一般采用open-closed表。
使用该算法注意的问题:
(1)使用该算法关键的数据结构为:队列,队列保证了广度优先,并且每个节点都被处理到
(2)新加入的节点一般要是未处理过的,所以某些情况下最初要对所有节点进行标记
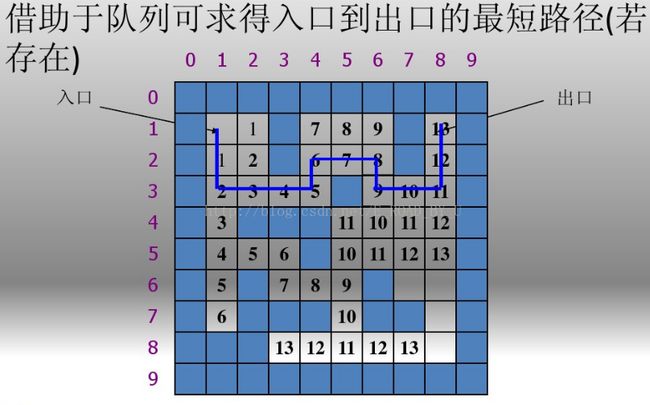

利用队列保存没有寻找过的点,利用数组保存寻找过的节点的父节点,遍历完所有的节点后,由目的节点在数组中找其父节点,然后找父节点的父节点依次直到开始节点。
bfs求最短路:
1struct P
2{
3 int v, w;//v顶点 w最短距离
4 bool operator <(const P &a)const{
5 return a.w < w;//按w 从小到大排序
6 }
7};
8 priority_queue que;
程序在另一篇博客中写过:http://blog.csdn.net/e_road_by_u/article/details/70037441
感觉广搜只能搜索权值不一样的二叉树或权值都一样的图。(因为广搜只能进一次队列)(如果使用优先队列则都可以,这时可以按照起点到当前搜到的点的权值进行排序,权值低的优先出队。这与dijstra不是一样了吗???)