强化学习 Q-learning及python例子
文章目录
- Q-learning原理
- python例子
本文是作者在学习莫烦的强化学习课程中的笔记,强烈推荐 莫烦强化学习。
Q-learning原理
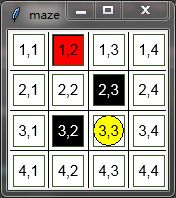
我们以一个走迷宫的小游戏为例:让探索者学会走迷宫. 黄色的是天堂 (reward 1), 黑色的地狱 (reward -1). 大多数 RL 是由 reward 导向的, 所以定义 reward 是 RL 中比较重要的一点.
Q-learning原理实际上就是建立一个Q表(最本文最后有展示),里面包含所有状态下、不同动作的Q值(最终根据Q值走出迷宫),Q-learning通过不断尝试每个回合、每一步,不断的更新Q表,最终达到最优的状态。
整个算法就是一直不断更新 Q table 里的值, 然后再根据新的值来判断要在某个 state 采取怎样的 action. Qlearning 是一个 off-policy 的算法, 因为里面的 max action 让 Q table 的更新可以不基于正在经历的经验(可以是现在学习着很久以前的经验,甚至是学习他人的经验). 不过这一次的例子, 我们没有运用到 off-policy, 而是把 Qlearning 用在了 on-policy 上, 也就是现学现卖, 将现在经历的直接当场学习并运用. On-policy 和 off-policy 的差别我们会在之后的 Deep Q network (off-policy) 学习中见识到. 而之后的教程也会讲到一个 on-policy (Sarsa) 的形式, 我们之后再对比。
python例子
首先我们先 import 两个模块, maze_env 是我们的环境模块, 已经编写好了, 大家可以直接在这里下载, maze_env 模块我们可以不深入研究, 如果你对编辑环境感兴趣, 可以去看看如何使用 python 自带的简单 GUI 模块 tkinter 来编写虚拟环境. maze_env 就是用 tkinter 编写的. 而 RL_brain 这个模块是 RL 的大脑部分.
from maze_env import Maze
from RL_brain import QLearningTable
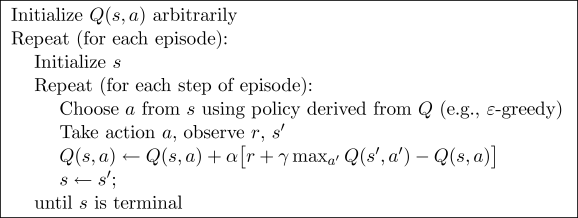
下面的代码, 我们可以根据上面的图片中的算法对应起来, 这就是整个 Qlearning 最重要的迭代更新部分啦.
def update():
# 学习 100 回合
for episode in range(100):
# 初始化 state 的观测值
observation = env.reset()
while True:
# 更新可视化环境
env.render()
# RL 大脑根据 state 的观测值挑选 action
action = RL.choose_action(str(observation))
# 探索者在环境中实施这个 action, 并得到环境返回的下一个 state 观测值, reward 和 done (是否是掉下地狱或者升上天堂)
observation_, reward, done = env.step(action)
# RL 从这个序列 (state, action, reward, state_) 中学习
RL.learn(str(observation), action, reward, str(observation_))
# 将下一个 state 的值传到下一次循环
observation = observation_
# 如果掉下地狱或者升上天堂, 这回合就结束了
if done:
break
# 结束游戏并关闭窗口
print('game over')
env.destroy()
if __name__ == "__main__":
# 定义环境 env 和 RL 方式
env = Maze()
RL = QLearningTable(actions=list(range(env.n_actions)))
# 开始可视化环境 env
env.after(100, update)
env.mainloop()
迷宫中各个状态的位置:
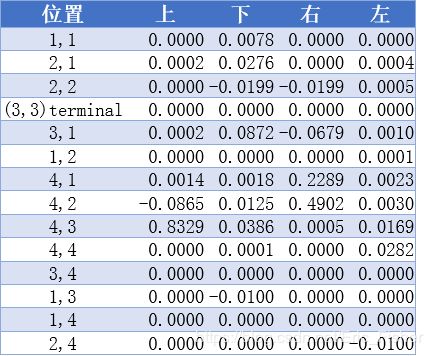
最终学到的Q表: