ROS(四):简单的机器人仿真
之前跟着古月居的博客一步一步学ROS,发现可能大神写的博客很早了,然后代码有些版本存在问题.所以LZ要自己在记录下.
环境为Ubuntu14.04+ros indigo.参开书籍:ROS by Example
LZ假设小伙伴已经安装成功ROS indigo的版本.
1.检查环境并安装依赖
cd ~
wget https://raw.githubusercontent.com/pirobot/rbx1/indigo-devel/rbx1-prereq.sh
sh rbx1-prereq.sh2.安装书中例子
cd ~/catkin_ws/src/
git clone https://github.com/pirobot/rbx1.git
cd rbx1
git checkout indigo-devel
cd ~/catkin_ws
catkin_make
source ~/catkin_ws/devel/setup.bash
rospack profile3.安装机器人模拟器
rviz是一个显示机器人实体的工具,本身不具有模拟的功能,需要安装一个模拟器arbotix。
sudo apt-get install ros-indigo-arbotix-*
rospack profile4.TurtleBot机器人的模拟
在书中的rbx_vol_1包里已经为我们写好了模拟的代码,我们先进行实验,完成后再仔细研究代码。
机器人模拟运行:
roscore
//如果找不到package,可以source devel/setup.bach
roslaunch rbx1_bringup fake_pi_robot.launch
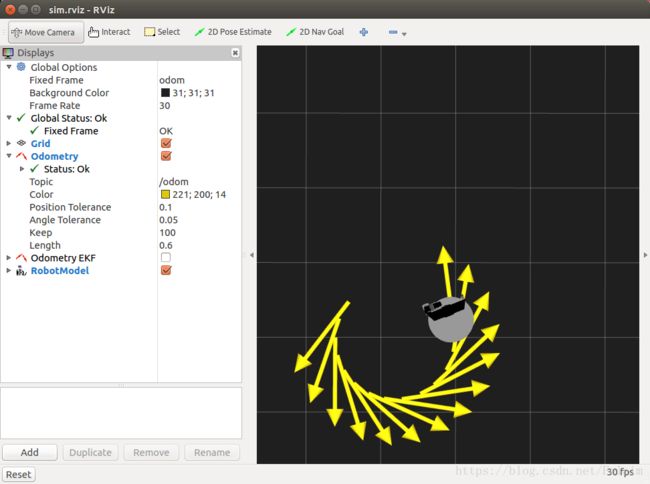
rosrun rviz rviz -d `rospack find rbx1_nav`/sim.rviz
//发布一个信息
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'最后效果如下图所示:
如果要让机器人停下来,需要在中端中按下“Ctrl+c”,然后输入:
rostopic pub -1 /cmd_vel geometry_msgs/Twist '{}'
在/home/felaim/catkin_ws/src/rbx1/rbx1_bringup/launch中打开fake_turtlebot.launch
<launch>
<param name="/use_sim_time" value="false" />
//从制定的包中加载urdf文件
<arg name="urdf_file" default="$(find xacro)/xacro.py '$(find rbx1_description)/urdf/turtlebot.urdf.xacro'" />
<param name="robot_description" command="$(arg urdf_file)" />
//启动arbotix模拟器
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen" clear_params="true">
<rosparam file="$(find rbx1_bringup)/config/fake_turtlebot_arbotix.yaml" command="load" />
<param name="sim" value="true"/>
node>
//启动状态,发布节点
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher">
//tf坐标系配置
<param name="publish_frequency" type="double" value="20.0" />
node>
launch>
在/home/felaim/catkin_ws/src/rbx1/rbx1_nav中打开nav_test.rviz可以看到:很多的参数设置!!!
Panels:
- Class: rviz/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /Status1
- /Odometry1
Splitter Ratio: 0.652661
Tree Height: 483
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
Name: Tool Properties
Splitter Ratio: 0.588679
- Class: rviz/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: rviz/Time
Experimental: false
Name: Time
SyncMode: 0
SyncSource: ""
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 0.5
Class: rviz/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.03
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 20
Reference Frame: odom
Value: true
- Angle Tolerance: 0.05
Class: rviz/Odometry
Color: 221; 200; 14
Enabled: true
Keep: 100
Length: 0.6
Name: Odometry
Position Tolerance: 0.1
Topic: /odom
Value: true
- Angle Tolerance: 0.1
Class: rviz/Odometry
Color: 253; 124; 0
Enabled: false
Keep: 100
Length: 0.6
Name: Odometry EKF
Position Tolerance: 0.1
Topic: /odom
Value: false
- Alpha: 1
Class: rviz/RobotModel
Collision Enabled: false
Enabled: true
Links:
All Links Enabled: true
Expand Joint Details: false
Expand Link Details: false
Expand Tree: false
Link Tree Style: Links in Alphabetic Order
base_footprint:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
base_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
camera_depth_frame:
Alpha: 1
Show Axes: false
Show Trail: false
camera_depth_optical_frame:
Alpha: 1
Show Axes: false
Show Trail: false
camera_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
camera_rgb_frame:
Alpha: 1
Show Axes: false
Show Trail: false
camera_rgb_optical_frame:
Alpha: 1
Show Axes: false
Show Trail: false
front_wheel_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
gyro_link:
Alpha: 1
Show Axes: false
Show Trail: false
laser:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
left_cliff_sensor_link:
Alpha: 1
Show Axes: false
Show Trail: false
left_wheel_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
leftfront_cliff_sensor_link:
Alpha: 1
Show Axes: false
Show Trail: false
plate_0_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
plate_1_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
plate_2_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
plate_3_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
rear_wheel_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
right_cliff_sensor_link:
Alpha: 1
Show Axes: false
Show Trail: false
right_wheel_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
rightfront_cliff_sensor_link:
Alpha: 1
Show Axes: false
Show Trail: false
spacer_0_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
spacer_1_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
spacer_2_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
spacer_3_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
standoff_2in_0_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
standoff_2in_1_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
standoff_2in_2_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
standoff_2in_3_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
standoff_2in_4_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
standoff_2in_5_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
standoff_2in_6_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
standoff_2in_7_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
standoff_8in_0_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
standoff_8in_1_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
standoff_8in_2_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
standoff_8in_3_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
standoff_kinect_0_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
standoff_kinect_1_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
wall_sensor_link:
Alpha: 1
Show Axes: false
Show Trail: false
Name: RobotModel
Robot Description: robot_description
TF Prefix: ""
Update Interval: 0
Value: true
Visual Enabled: true
Enabled: true
Global Options:
Background Color: 31; 31; 31
Fixed Frame: odom
Frame Rate: 30
Name: root
Tools:
- Class: rviz/MoveCamera
- Class: rviz/Interact
Hide Inactive Objects: true
- Class: rviz/Select
- Class: rviz/SetInitialPose
Topic: /initialpose
- Class: rviz/SetGoal
Topic: /move_base_simple/goal
Value: true
Views:
Current:
Angle: -1.57
Class: rviz/TopDownOrtho
Enable Stereo Rendering:
Stereo Eye Separation: 0.06
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Name: Current View
Near Clip Distance: 0.01
Scale: 223.579
Target Frame:
Value: TopDownOrtho (rviz)
X: 0.552935
Y: 0.0507111
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 696
Hide Left Dock: false
Hide Right Dock: false
QMainWindow State: 000000ff00000000fd00000004000000000000012d00000272fc0200000005fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000006400fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000002800000272000000dd00ffffff000000010000010f00000270fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073000000002800000270000000b000fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000004a00000003efc0100000002fb0000000800540069006d00650000000000000004a0000002f600fffffffb0000000800540069006d00650100000000000004500000000000000000000002990000027200000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: false
Width: 972
X: 286
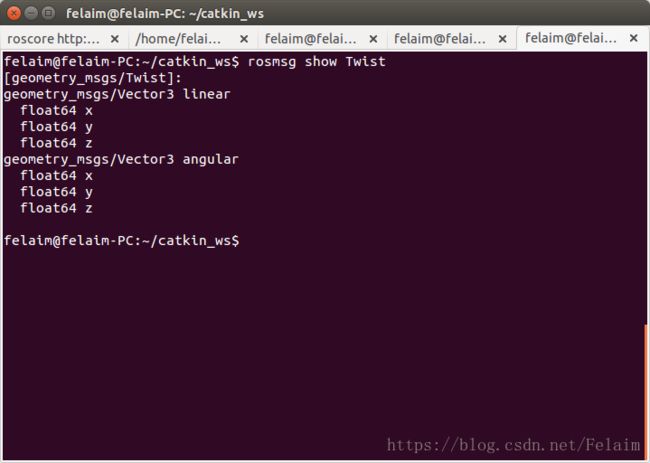
Y: 141 查看了一下msg:
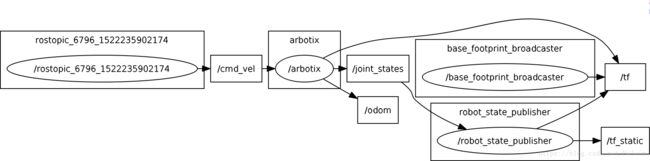
可以看下Topics graph:
蜗牛背着重重的壳,一步一步往上爬^_^RVIZ有很多还蛮炫的demo,如果小伙伴感兴趣的话,可以运行看看.
参考博客:https://www.ncnynl.com/archives/201609/841.html