计算几何入门 1.4:凸包的构造——Jarvis March算法
回顾凸包构造算法:极点法、极边法和增量构造法,其复杂度分别为O(n^4)、O(n^3)和O(n^2),效率经过优化已经大大提高了。接下来引入一种新的算法——Jarvis March,其复杂度也是O(n^2),但是相较于增量构造在最好情况下效率是较高的。
一、选择排序
依旧是先回顾一个经典算法:选择排序(selection sort)。排序过程可以归结为下图:
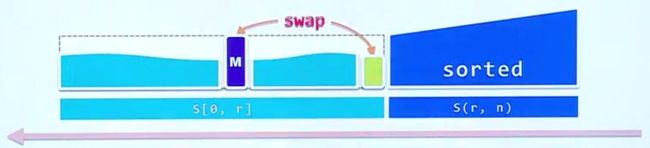
对比插入排序,可以发现sorted部分变成了从后向前扩张。算法的整体思路依然是增量式的,每次选取unsorted部分中的最大元素,和sorted部分前一个元素交换,重复上述过程完成sorted部分的扩张最终使得序列有序。
和插入排序每次随便从unsorted部分选取元素不同,选择排序每次选取出的unsorted最大元素放在sorted前一个位置上,也就意味着整个unsorted部分必然不会超过sorted部分。从算法整体框架考虑,每次我们都是维护一个局部解(也就是sorted部分),然后从尚未处理的部分(也就是unsorted部分)找到一个与当前局部解“紧密相关的元素”(相当于选取的最大元素)。这个思想为解决凸包问题带来了新思路。
二、策略
再来考虑为何极边法复杂度高达O(n^3)。实际上我们要对点集中所有边进行遍历,这需要n^2复杂度,然后对每个边进行鉴别,又需要n复杂度,因此总体复杂度高达O(n^3)。那么该如何改进呢?这就可以运用选择排序的思想:将下一个要查找的边缩小到一个小范围,而非遍历所有边。
先对算法的大致过程有直观的认识(标识为:已找到极边数/所有极边数):
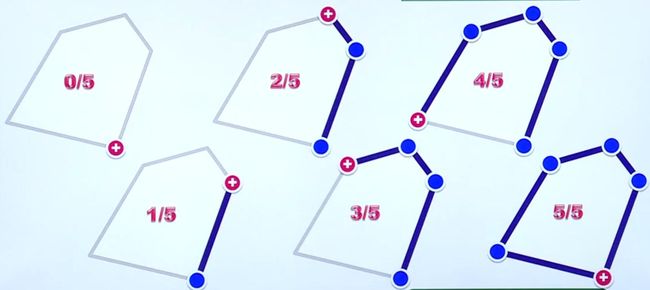
首先从任何一个极点(后面说明如何找到这个点)开始(图中0/5),然后找到一条以这个极点为端点的极边(1/5)。接着沿着极边另一个端点(endpoint)出发,再找出下一条极边(2/5)。如此反复操作,最终会找到一条以最初极点为endpoint的极边,得到一个封闭的环,凸包也构造完成。凸包构造过程类似于选择排序中sorted不断向前扩展一样,不断扩展局部解,最后得到问题最终解。
凸包构造的问题由此分解为一个个子问题:如何从endpoint出发找到下一条极边。
三、继续to left test
考虑以下一般情况:

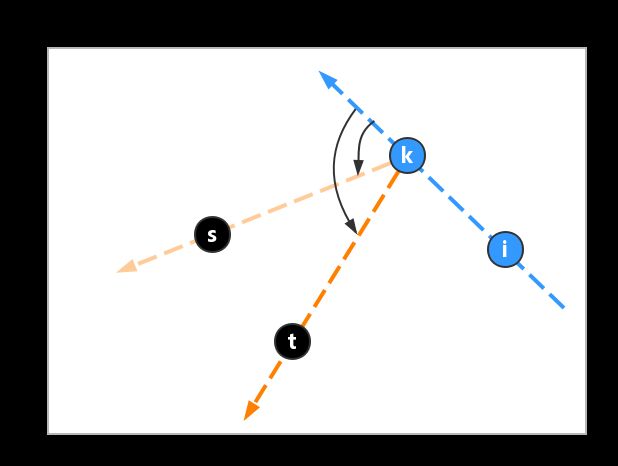
我们从极点o开始寻找极边,假设当前找到的极边是ik,接下来要做的工作是找到从k出发的另一条极边ks,即找到极点s。
显然,s来自于其他那些尚未处理的点中,那么s与其他点相比有什么特征?观察发现,ik作为一条极边,它的右侧肯定都是空的,所有其他点都在ik左侧。画出k与其他候选点的有向直线,例如下图中的ks,kt:

注意图中红色标出的角度,可以看出ks与ik的夹角比kt小,也就是ks比kt相较于ik偏左的角度更小。实际上ks偏左的角度比其他任何从k出发的边都小,这就是s点的判定依据。
这样就找到了从其余点中选择s点的思路:任选两个点,从k出发过这两点做有向边,看哪个偏左的角度更小就留下,另一点丢弃。然后再拿一点与留下的点比较,反复这个过程,最终留下的就是要找的s点。
问题至此转化为:如何比较两条有向边(例如ks和kt)相较于另一有向直线(例如ik)谁偏左的角度更小。
当然可以通过计算三角函数的方法来比较,这是最直观的数学思维。但是这样计算十分复杂,更重要的是引入了误差。这时候又要使用to left test这个基础方法来解决问题了。
具体做法就是以在ks和kr中以任意个为基准(如以ks为基准),对另一点(如t)做to left test。上图点t和有向边ks的to left test结果为true,t在ks左边,因此ks偏左的角度更小,舍弃点t。
类比选择排序来理解,sorted部分就相当于已得到的极边(从极点o开始到ik的首尾相连的极边),unsorted部分相当于其余点,从unsorted部分取出极大值就相当于找到点s——能构成最小偏角的点。选择排序中的选择过程需要比较元素大小,就要由一种比较器完成,而上述比较偏角的过程也可以抽象为一种比较器的操作。构造凸包的算法框架与选择排序相同,只是比较器替换为to left test而已。
//此处只是考虑一般情况,一些特殊细节未进行处理。例如在st上有s和s'两点,这两点的取舍问题未考虑。当然为了理解算法整体框架忽略特殊情况是很必要的。
然后考虑一个细节问题,也就是上文提到的算法最开始第一个极点如何确定。任何一个极点都可以使用,我们没必要去计算出哪个点是极点。可以选取y坐标最小的点,也就是最低点,在没有退化的情况下,这个点一定是一个极点。如果情况退化,有多个最低点(如例图中所示),我们就去选x坐标最小的那个点,也就是最左边的点即可。这种方法选出的点称为lowest-then-leftmost point(LTL)。注意选取的规则的先后顺序,先选lowest,若点不唯一再选leftmost。
四、Jarvis March
类比选择排序的过程,我们得到的凸包构造算法就是Jarvis March算法,又称gift wrapping算法(算法过程如包装礼物一样)。接下来看算法具体实现方法。
bool ToLeft(Point p, Point q, Point s)
{
int area2 = p.x * q.y - p.y * q.x
+ q.x * s.y - q.y * s.x
+ s.x * p.y - s.y * p.x;
return area2 > 0; //左侧为真
}
int ltl(Point S[], int n)
{
int LTL = 0;
for (int k = 1; k < n; k++)
if (S[k].y < S[LTL].y ||
(S[k].y == S[LTL].y &&
S[k].x < S[LTL].x))
LTL = K;
return LTL;
}
void Jarvis(Point S[], int n)
{
for (int = 0; k < n; k++)
S[k].extreme = false; //首先将所有点标记为非极点
int LTL = ltl(s, n); //找到LTL
int k = LTL; //将LTL作为第一个极点
do
{
S[k].extreme = true; //判定为极点
int s = -1;
//选取下一个极点,每次比较两个点s和t,
//做点t和有向边ks的to left test,最终找到s
for (int t = 0; t < n; t++)
if (t != k && t != s && //除了k和s外每个点
(s == -1 || !ToLeft(P[k], P[s], P[t]))) //
s = t; //如果t在s右边
S[k].succ = s; //k点的后继为s
k = s; //s变为下一次查找的起点
} while (LTL != k)
}
最后分析Jarvis March算法相较于增量构造法的优势。二者都是O(n^2)的复杂度,Jarvis March算法的优势在于其的“输出敏感性(output sensitive)”。考虑点集S,共有n个点,来构造S上的凸包。
何为“输出敏感性”?Jarvis March算法每次新加入一条边都会耗费n的复杂度,但是构造过程一共会加入的边数往往比n少。如下图(设n = 7):
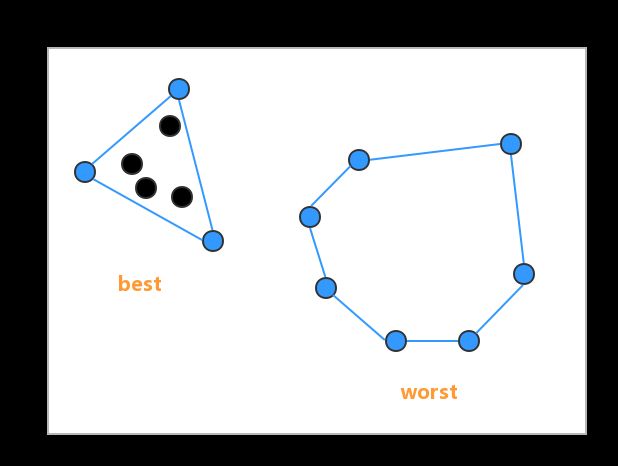
在非退化为共线的前提下,最好情况为只加入3条边(复杂度为O(3n)),最坏情况为所有点都是极点,加入n-1条边(复杂度为O(n^2))。实际情况中最坏情况出现的几率很小,我们引入一个指标h来衡量凸包的极边数(the size of convex hull):
h = |CH(S)|
Jarvis March算法算法的复杂度更准确的表示为O(nh)。h又由最终输出结果,即凸包本身来决定,输出结果决定了构造过程的复杂度,这就是所谓的“输出敏感性”。这种类型的算法又被称为output sensitive algorithm。这种特性在其它凸包算法中也会体现。
本文是学堂在线课程《计算几何》的笔记,帮助理解和记录思考过程,不够严谨请见谅。