Torch7入门续集(五)----进一步了解optim
总说
现在看以前写的入门续集,觉得写的好烂,但我不想改了。在torch7学习(六)稍微提到了optim,觉得写的很不清楚,所以有了这篇。
入门续集到了这篇,个人认为看Torch框架的深度学习代码应该没啥大问题了。
总览
x*, {f}, ... = optim.method(opfunc, x[, config][, state])
- opfunc: 自定义的闭包,必须包含:我们计算的f 对于优化的参数x的求导的API,比如大部分我们是训练网络,然后我们的 f 就是loss,而x就是网络的weight。此时我们在opfunc中必须包含”API”, 这个“API”在这里类似是:
-- 这里的loss就是f
local loss = criterion:forward(predict, trainlabels)
local dloss_dpredict = criterion:backward(predict,trainlabels)
-- 这里调用backward,这个backward会计算gradWeight, gradBias以及gradInput.
local gradInput = net:backward(trainset, dloss_dpredict)- x: 需要优化的参数,这里的x必须是一维的!
- config: 根据不同的优化方法,设置不同的选项。
- state: 这个一般包含learningRate,learningRateDecay之类的。
- x*: 其中 x* = argmin_x f(x)
- {f}: 略
一般的写法:
require 'optim'
local optimState = {learningRate = 0.01}
local params, gramParams = net:getParameters()
function feval(params)
-- 无论如何,在f函数中,先要将需要“优化的参数的梯度”设置成0
gradParams:zero()
-- 重新计算“需要优化的参数”。
local outputs = model:forward(batchInputs)
local loss = criterion:forward(outputs, batchLabels)
local dloss_doutputs = criterion:backward(outputs, batchLabels)
model:backward(batchInputs, dloss_doutputs)
-- 返回f值,就是loss,以及gramParams(这个必须是一维的)
return loss, gradParams
end
for epoch = 1, 50 do
-- 加载点数据,干点额外的事。
-- 在最后一句调用optim.method
optim.sgd(feval, params, optimState)
end再次强调:backward只是调用每一层的 updateGradInput以及accGradParameters,并不会更新参数,只是计算参数的梯度,以及计算每一层的输入的梯度。
local fDx = function(x)
netD:apply(function(m) if torch.type(m):find('Convolution') then m.bias:zero() end end)
netG:apply(function(m) if torch.type(m):find('Convolution') then m.bias:zero() end end)
gradParametersD:zero()
-- Real
-- train netD with (real, real_label)
local output = netD:forward(real_AB)
local label = torch.FloatTensor(output:size()):fill(real_label)
if opt.gpu>0 then
label = label:cuda()
end
local errD_real = criterion:forward(output, label)
local df_do = criterion:backward(output, label)
-- 这里对针对real的图,计算netD的网络的输入的梯度,以及网络参数的梯度。
netD:backward(real_AB, df_do)
-- Fake
-- train netD with (fake_AB, fake_label)
local output = netD:forward(fake_AB)
label:fill(fake_label)
local errD_fake = criterion:forward(output, label)
local df_do = criterion:backward(output, label)
-- 这里的netD的参数没有置0,所以梯度是累加!
-- 当netD经过real和fake的计算后,梯度“中和”后,再将我们需要优化
-- 的网络的参数的梯度 gradParametersD输出。
netD:backward(fake_AB, df_do)
errD = (errD_real + errD_fake)/2
return errD, gradParametersD
end可以结合 Torch7入门续集(八)—终结篇的“再次说说网络更新权值的方式”来理解。
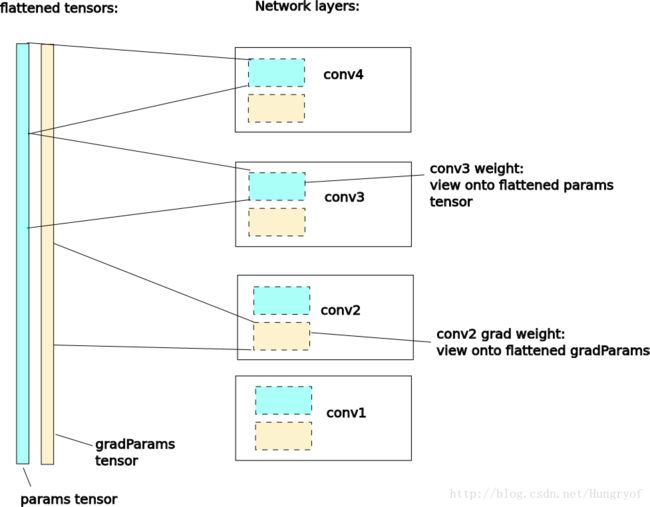
getParameters
我们发现,上面采用了getParameters函数。这个函数会将网络中的参数全部压缩成一维的存储空间连续的Tensor。并返回网络中的weight(以及bias)和gradWeight(以及gradBias)。
前面提到optim.method要求需要优化的参数x必须是一维的!
两种典型的训练写法
方式一:针对网络参数的训练(大部分情况)
这种就是训练一个模型呗,优化weight,使之能够完成特定任务。比如VGG之类的。
local parametersD, gradParametersD = netD:getParameters()
-- 自定义闭包
local fDx = function(x)
gradParametersD:zero()
local output = netD:forward(real_AB)
local label = torch.FloatTensor(output:size()):fill(real_label)
local errD_real = criterion:forward(output, label)
local df_do = criterion:backward(output, label)
netD:backward(real_AB, df_do)
errD = errD_real
return errD, gradParametersD
end
然后在训练时
for epoch = 1, opt.niter do
for i = 1, math.min(data:size(), opt.ntrain), opt.batchSize do
-- load a batch and run G on that batch
createRealFake()
optim.adam(fDx, parametersD, optimStateD)
-- 做点其他的事情
end
parametersD, gradParametersD = netD:getParameters() -- reflatten the params and get them
collectgarbage()
end方式一的分析
然后我们要优化的是netD的参数,那么我们必须
1. 先确认我们需要优化的参数,好了,我们需要优化的是D网络的参数,所以肯定要让netD进行一次backward。
2. 显然我们要先得到loss,才能进行backward。所以我们要将netD:forward,得到loss后,再反向传播得到dLoss_doutput
3. dLoss_doutput用backward经过netD。值得注意的是,调用backward前,必须先进行该网络的forward。
local fDx = function(x)
-- 第一步,先让需要优化的参数的梯度为0.
-- 一万年不变,这句话。
gradParametersD:zero()
-- 中间部分。这里无论怎么写,必须至少要包含我们参数所在的网络的一次backward。
local output = netD:forward(real_AB)
local label = torch.FloatTensor(output:size()):fill(real_label)
local errD_real = criterion:forward(output, label)
local df_do = criterion:backward(output, label)
netD:backward(real_AB, df_do)
errD = errD_real
-- 这里返回的 gradParametersD 是由getParameters()返回的,已经是被压平成1维的了。
return errD, gradParametersD
end下面这种是常规写法。adam或是sgd等等都是这种方式,必须指定迭代的次数!
for epoch = 1, opt.niter do
for i = 1, math.min(data:size(), opt.ntrain), opt.batchSize do
-- load a batch and run G on that batch
createRealFake()
optim.adam(fDx, parametersD, optimStateD)
-- 做点其他的事情
end
-- 最后要重新获得参数,毕竟是用for循环的。
parametersD, gradParametersD = netD:getParameters() -- reflatten the params and get them
collectgarbage()
end方式二:针对输入的训练(不改变模型的参数,只不断改变输入)
这种一般是通过迭代的方式,使得输入能满足某种分布,从而使得loss最小。一般采用已有的模型。比如neural style中的采用VGG19模型,它并不改变模型的参数,而是不断改变input。也就是说,我们这里需要优化的参数是gradInput!
说明时,采用neural_style的代码。
local num_calls = 0
local function feval(x)
num_calls = num_calls + 1
-- net:forward(x)会让content_module以及style_module各层计算loss
net:forward(x)
-- 由于并没有groundtruth的图。所以直接dy赋值为全是0的tensor
local grad = net:updateGradInput(x, dy)
-- loss包括content层的以及style层的,然后让这些loss加起来,让loss最小即可。
local loss = 0
for _, mod in ipairs(content_losses) do
loss = loss + mod.loss
end
for _, mod in ipairs(style_losses) do
loss = loss + mod.loss
end
maybe_print(num_calls, loss)
maybe_save(num_calls)
collectgarbage()
-- 返回的第一个参数是loss,是要最小化的目标,而传入feval的参数是要优化的参数。
-- optim.lbfgs expects a vector for gradients
return loss, grad:view(grad:nElement())
end训练时:
-- Run optimization.
if params.optimizer == 'lbfgs' then
print('Running optimization with L-BFGS')
local x, losses = optim.lbfgs(feval, img, optim_state)
elseif params.optimizer == 'adam' then
print('Running optimization with ADAM')
for t = 1, params.num_iterations do
local x, losses = optim.adam(feval, img, optim_state)
end
end方式二: 分析
由于这种并不更新网络的参数,所以就不要 gradParams:zero() 了。
更新输入时,由于这里没有groundtruth。我们只是希望 G(F(in)) 与 G(F(S)) 差异最小,同时希望 F(in) 和 F(C) 最小。这里的local grad = net:updateGradInput(x, dy)为什么可以这样做。 以styleLoss的updateInput为例。对于最后一层的style层,gradOutput是值为0的tensor。然后乘以strength后,直接加入gradInput。这样,最后的grad就是融合了每个层的grad的累加。
function StyleLoss:updateGradInput(input, gradOutput)
local dG = self.crit:backward(self.G, self.target)
dG:div(input:nElement())
self.gradInput = self.gram:backward(input, dG)
if self.normalize then
self.gradInput:div(torch.norm(self.gradInput, 1) + 1e-8)
end
self.gradInput:mul(self.strength)
self.gradInput:add(gradOutput)
return self.gradInput
end训练时当遇到lbfgs,这个函数会不断调用feval,所以就不需要放入for中了。
-- Run optimization.
if params.optimizer == 'lbfgs' then
print('Running optimization with L-BFGS')
local x, losses = optim.lbfgs(feval, img, optim_state)
elseif params.optimizer == 'adam' then
print('Running optimization with ADAM')
for t = 1, params.num_iterations do
local x, losses = optim.adam(feval, img, optim_state)
end
end