用32板实现ps2无线遥控的实时控制
最近对无线控制有点着迷,无意中接触到ps2无线遥控,发射/接收端自动连接,通道多(包括摇杆模拟值),通信协议简单,关键价格还便宜!
经过一下午对材料的阅读,更改程序,最终实现了无线遥控实时控制LED灯的亮灭,当然,对其他器件的控制只要更改执行语句就可以实现了。
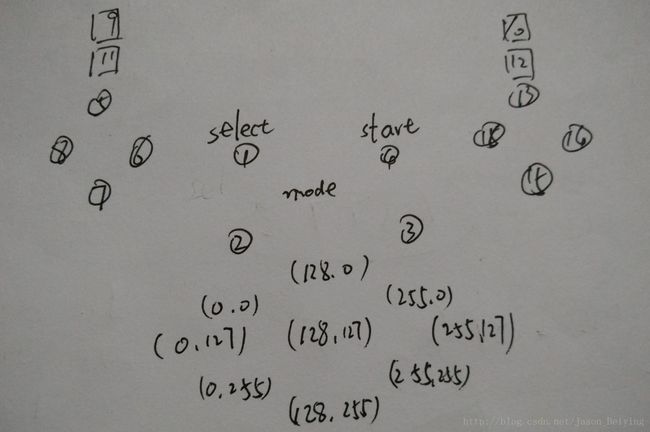
按键值:
.h .c文件
#ifndef __PSTWO_H
#define __PSTWO_H
#include "delay.h"
#include "sys.h"
/*********************************************************
Copyright (C), 2015-2025, YFRobot.
www.yfrobot.com
File:PS2驱动程序
Author:pinggai Version:1.1 Data:2015/10/20
Description: PS2驱动程序
增加功能:
1、软件设置“红灯模式”、“绿灯模式”,并可以设置“保存”,通过手柄“模式按键”无法改变
2、设置手柄震动:通过数值的设置,改变左侧大震动电机震动频率。
通过数值的设置,开关右侧小震动电机。
History:
V1.0: 2015/05/16
1、手柄解码,识别按键值,读取模拟值。
**********************************************************/
#define DI PBin(12) //PB12 输入
#define DO_H PBout(13)=1 //命令位高
#define DO_L PBout(13)=0 //命令位低
#define CS_H PBout(14)=1 //CS拉高
#define CS_L PBout(14)=0 //CS拉低
#define CLK_H PBout(15)=1 //时钟拉高
#define CLK_L PBout(15)=0 //时钟拉低
//These are our button constants
#define PSB_SELECT 1
#define PSB_L3 2
#define PSB_R3 3
#define PSB_START 4
#define PSB_PAD_UP 5
#define PSB_PAD_RIGHT 6
#define PSB_PAD_DOWN 7
#define PSB_PAD_LEFT 8
#define PSB_L2 9
#define PSB_R2 10
#define PSB_L1 11
#define PSB_R1 12
#define PSB_GREEN 13
#define PSB_RED 14
#define PSB_BLUE 15
#define PSB_PINK 16
#define PSB_TRIANGLE 13
#define PSB_CIRCLE 14
#define PSB_CROSS 15
#define PSB_SQUARE 16
//#define WHAMMY_BAR 8
//These are stick values
#define PSS_RX 5 //右摇杆X轴数据
#define PSS_RY 6
#define PSS_LX 7
#define PSS_LY 8
extern u8 Data[9];
extern u16 MASK[16];
extern u16 Handkey;
void PS2_Init(void);
u8 PS2_RedLight(void); //判断是否为红灯模式
void PS2_ReadData(void); //读手柄数据
void PS2_Cmd(u8 CMD); //向手柄发送命令
u8 PS2_DataKey(void); //按键值读取
u8 PS2_AnologData(u8 button); //得到一个摇杆的模拟量
void PS2_ClearData(void); //清除数据缓冲区
void PS2_Vibration(u8 motor1, u8 motor2);//振动设置motor1 0xFF开,其他关,motor2 0x40~0xFF
void PS2_EnterConfing(void); //进入配置
void PS2_TurnOnAnalogMode(void); //发送模拟量
void PS2_VibrationMode(void); //振动设置
void PS2_ExitConfing(void); //完成配置
void PS2_SetInit(void); //配置初始化
#endif#include "pstwo.h"
/*********************************************************
Copyright (C), 2015-2025, YFRobot.
www.yfrobot.com
File:PS2驱动程序
Author:pinggai Version:1.1 Data:2015/10/20
Description: PS2驱动程序
增加功能:
1、软件设置“红灯模式”、“绿灯模式”,并可以设置“保存”,通过手柄“模式按键”无法改变
2、设置手柄震动:通过数值的设置,改变左侧大震动电机震动频率。
通过数值的设置,开关右侧小震动电机。
History:
V1.0: 2015/05/16
1、手柄解码,识别按键值,读取模拟值。
**********************************************************/
#define DELAY_TIME delay_us(5);
u16 Handkey; // 按键值读取,零时存储。
u8 Comd[2]={0x01,0x42}; //开始命令。请求数据
u8 Data[9]={0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}; //数据存储数组
u16 MASK[]={
PSB_SELECT,
PSB_L3,
PSB_R3 ,
PSB_START,
PSB_PAD_UP,
PSB_PAD_RIGHT,
PSB_PAD_DOWN,
PSB_PAD_LEFT,
PSB_L2,
PSB_R2,
PSB_L1,
PSB_R1 ,
PSB_GREEN,
PSB_RED,
PSB_BLUE,
PSB_PINK
}; //按键值与按键明
//手柄接口初始化 输入 DI->PB12
// 输出 DO->PB13 CS->PB14 CLK->PB15
void PS2_Init(void)
{
//输入 DI->PB12
RCC->APB2ENR|=1<<3; //使能PORTB时钟
GPIOB->CRH&=0XFFF0FFFF;//PB12设置成输入 默认下拉
GPIOB->CRH|=0X00080000;
// DO->PB13 CS->PB14 CLK->PB15
RCC->APB2ENR|=1<<3; //使能PORTB时钟
GPIOB->CRH&=0X000FFFFF;
GPIOB->CRH|=0X33300000;//PB13、PB14、PB15 推挽输出
}
//向手柄发送命令
void PS2_Cmd(u8 CMD)
{
volatile u16 ref=0x01;
Data[1] = 0;
for(ref=0x01;ref<0x0100;ref<<=1)
{
if(ref&CMD)
{
DO_H; //输出一位控制位
}
else DO_L;
CLK_H; //时钟拉高
DELAY_TIME;
CLK_L;
DELAY_TIME;
CLK_H;
if(DI)
Data[1] = ref|Data[1];
}
delay_us(16);
}
//判断是否为红灯模式,0x41=模拟绿灯,0x73=模拟红灯
//返回值;0,红灯模式
// 其他,其他模式
u8 PS2_RedLight(void)
{
CS_L;
PS2_Cmd(Comd[0]); //开始命令
PS2_Cmd(Comd[1]); //请求数据
CS_H;
if( Data[1] == 0X73) return 0 ;
else return 1;
}
//读取手柄数据
void PS2_ReadData(void)
{
volatile u8 byte=0;
volatile u16 ref=0x01;
CS_L;
PS2_Cmd(Comd[0]); //开始命令
PS2_Cmd(Comd[1]); //请求数据
for(byte=2;byte<9;byte++) //开始接受数据
{
for(ref=0x01;ref<0x100;ref<<=1)
{
CLK_H;
DELAY_TIME;
CLK_L;
DELAY_TIME;
CLK_H;
if(DI)
Data[byte] = ref|Data[byte];
}
delay_us(16);
}
CS_H;
}
//对读出来的PS2的数据进行处理,只处理按键部分
//只有一个按键按下时按下为0, 未按下为1
u8 PS2_DataKey()
{
u8 index;
PS2_ClearData();
PS2_ReadData();
Handkey=(Data[4]<<8)|Data[3]; //这是16个按键 按下为0, 未按下为1
for(index=0;index<16;index++)
{
if((Handkey&(1<<(MASK[index]-1)))==0)
return index+1;
}
return 0; //没有任何按键按下
}
//得到一个摇杆的模拟量 范围0~256
u8 PS2_AnologData(u8 button)
{
return Data[button];
}
//清除数据缓冲区
void PS2_ClearData()
{
u8 a;
for(a=0;a<9;a++)
Data[a]=0x00;
}
/******************************************************
Function: void PS2_Vibration(u8 motor1, u8 motor2)
Description: 手柄震动函数,
Calls: void PS2_Cmd(u8 CMD);
Input: motor1:右侧小震动电机 0x00关,其他开
motor2:左侧大震动电机 0x40~0xFF 电机开,值越大 震动越大
******************************************************/
void PS2_Vibration(u8 motor1, u8 motor2)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01); //开始命令
PS2_Cmd(0x42); //请求数据
PS2_Cmd(0X00);
PS2_Cmd(motor1);
PS2_Cmd(motor2);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
CS_H;
delay_us(16);
}
//short poll
void PS2_ShortPoll(void)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x42);
PS2_Cmd(0X00);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
CS_H;
delay_us(16);
}
//进入配置
void PS2_EnterConfing(void)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x43);
PS2_Cmd(0X00);
PS2_Cmd(0x01);
PS2_Cmd(0x00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
CS_H;
delay_us(16);
}
//发送模式设置
void PS2_TurnOnAnalogMode(void)
{
CS_L;
PS2_Cmd(0x01);
PS2_Cmd(0x44);
PS2_Cmd(0X00);
PS2_Cmd(0x01); //analog=0x01;digital=0x00 软件设置发送模式
PS2_Cmd(0xEE); //Ox03锁存设置,即不可通过按键“MODE”设置模式。
//0xEE不锁存软件设置,可通过按键“MODE”设置模式。
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
CS_H;
delay_us(16);
}
//振动设置
void PS2_VibrationMode(void)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x4D);
PS2_Cmd(0X00);
PS2_Cmd(0x00);
PS2_Cmd(0X01);
CS_H;
delay_us(16);
}
//完成并保存配置
void PS2_ExitConfing(void)
{
CS_L;
delay_us(16);
PS2_Cmd(0x01);
PS2_Cmd(0x43);
PS2_Cmd(0X00);
PS2_Cmd(0x00);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
CS_H;
delay_us(16);
}
//手柄配置初始化
void PS2_SetInit(void)
{
PS2_ShortPoll();
PS2_ShortPoll();
PS2_ShortPoll();
PS2_EnterConfing(); //进入配置模式
PS2_TurnOnAnalogMode(); //“红绿灯”配置模式,并选择是否保存
PS2_VibrationMode(); //开启震动模式
PS2_ExitConfing(); //完成并保存配置
}#include "sys.h"
#include "usart.h"
#include "delay.h"
#include "led.h"
#include "key.h"
#include "pstwo.h"
int main(void)
{
vu8 key;
Stm32_Clock_Init(9); //系统时钟设置
delay_init(72); //延时初始化
uart_init(72,9600); //串口1初始化
LED_Init(); //初始化与LED连接的硬件接口
KEY_Init(); //初始化与按键连接的硬件接口
PS2_Init(); //驱动端口初始化
PS2_SetInit(); //配配置初始化,配置“红绿灯模式”,并选择是否可以修改
//开启震动模式
LED0=0; //点亮LED
while(1)
{
LED1 =! LED1;
key=PS2_DataKey();
if(key!=0) //有按键按下
{
printf(" \r\n %d is light \r\n",Data[1]);//ID
printf(" \r\n %d is pressed \r\n",key);
if(key == 11)
{
PS2_Vibration(0xFF,0x00); //发出震动后必须有延时 delay_ms(1000);
delay_ms(500);
}
else if(key == 12)
{
PS2_Vibration(0x00,0xFF); //发出震动后必须有延时 delay_ms(1000);
delay_ms(500);
}
else
PS2_Vibration(0x00,0x00);
}
printf(" %5d %5d %5d %5d\r\n",PS2_AnologData(PSS_LX),PS2_AnologData(PSS_LY),
PS2_AnologData(PSS_RX),PS2_AnologData(PSS_RY) );
delay_ms(50);
}
}
这个程序是通过串口向电脑发送按键值,想继续开发,请自行修改!
想获取更多资料及通信协议,请前往http://www.yfrobot.com/thread-11561-1-1.html