【Semantic Segmentation】语义分割综述 -- Encoder And Decoder
【Semantic Segmentation】语义分割综述 -- Encoder And Decoder
- Encoder And Decoder
- [FCN] Fully Convolutional Networks for Semantic Segmentation 2016-05
- FCN-32
- FCN-16
- FCN-8
- code by pytorch
- [U-Net] Convolutional Networks for Biomedical Image Segmentation 2015-05
- [SegNet] A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation 2015-11
Encoder And Decoder
encoder-decoder是语义分割最基础的网络结构。主要论文如下:
[FCN] Fully Convolutional Networks for Semantic Segmentation 2016-05
https://arxiv.org/abs/1605.06211
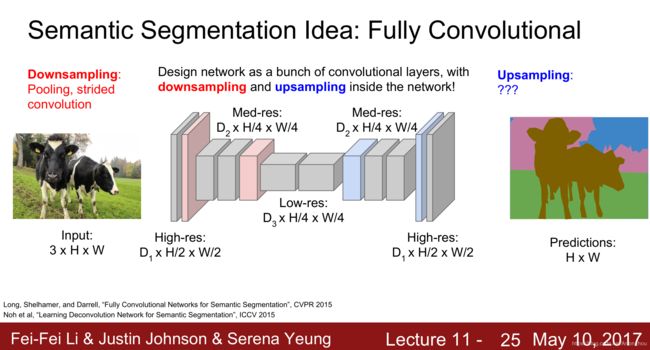
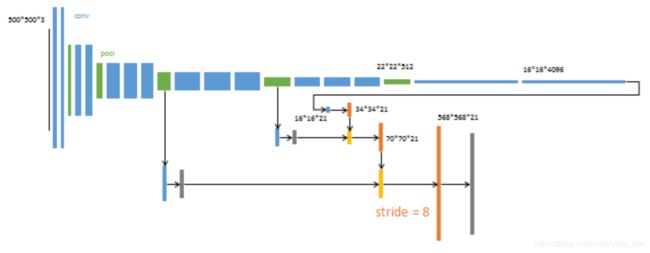
在前面的backbone做传统的卷积操作,不断增大感受野的同时,feature map size 不断缩小。为了解决feature map size 变小不能给每个像素分类的问题,进行上采样将feature map放大到原图。
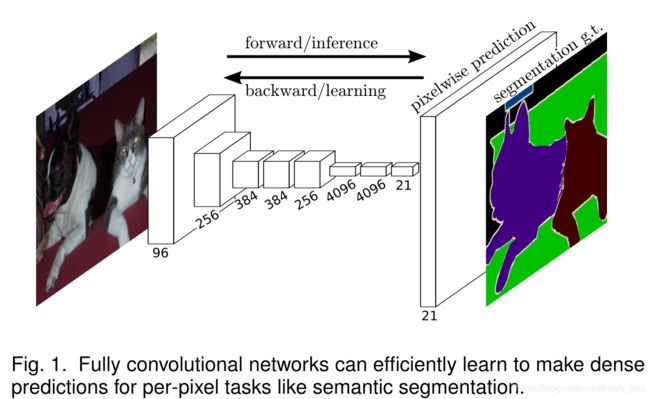
为了提高对细节像素的分类准确度,将encoder不同pooling大小的feature map 按照pixel-wise 与decoder层的pool相加,再做上采样。
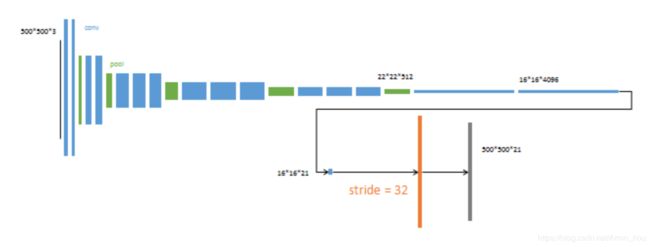
FCN-32
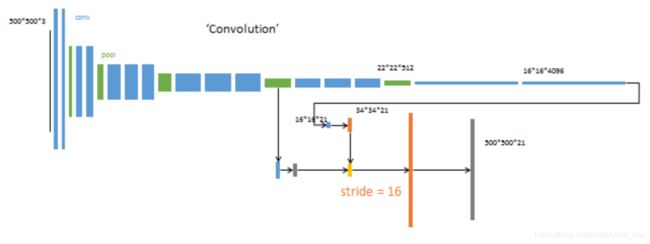
FCN-16
FCN-8
上图摘自 深度学习500问
code by pytorch
使用resnet 作为backbone 实现了fcn-4s如下,参考了torchvision的版本。
torchvision实现的是fcn-32s.
下面的变量pool与图中的pool并不是对应的。
使用双线性插值初始化转置卷积参数。
class FCNHead(nn.Sequential):
'''
To merge the feature mapping with different scale in the middle with the feature mapping by
upsampling need to change channel dimensionality to the same.
'''
def __init__(self, in_channels, channels):
inter_channels = in_channels // 4
layers = [
nn.Conv2d(in_channels, inter_channels, 3, padding=1, bias=False),
nn.BatchNorm2d(inter_channels),
nn.LeakyReLU(),
nn.Dropout(0.1),
nn.Conv2d(inter_channels, channels, 1)
]
super(FCNHead, self).__init__(*layers)
class FCNUpsampling(nn.Sequential):
'''
'''
def __init__(self, num_classes, kernel_size, stride=1, padding=0):
layers = [
nn.ConvTranspose2d(num_classes, num_classes, kernel_size,
stride=stride, padding=padding, bias=False)
]
super(FCNUpsampling, self).__init__(*layers)
class FCN(nn.Module):
def __init__(self, backbone, num_classes, aux_classifier=None):
super(FCN, self).__init__()
# Using the modified resNet to get 4 different scales of the tensor,
# in fact, the last three used in the paper,
# first reserved for experiment
self.backbone = getBackBone(backbone)
self.pool1_FCNHead = FCNHead(256, num_classes)
self.pool2_FCNHead = FCNHead(512, num_classes)
self.pool3_FCNHead = FCNHead(1024, num_classes)
self.pool4_FCNHead = FCNHead(2048, num_classes)
# upsampling using transposeConvolution
# out = s(in-1)+d(k-1)+1-2p
# while s = s , d =1, k=2s, p = s/2, we will get out = s*in
# we need to zoom in 32 times by 2 x 2 x 2 x 4
self.up_score2 = FCNUpsampling(num_classes, 4, stride=2, padding=1)
self.up_score4 = FCNUpsampling(num_classes, 8, stride=4, padding=2)
self.up_score8 = FCNUpsampling(num_classes, 16, stride=8, padding=4)
self.up_score32 = FCNUpsampling(num_classes, 64, stride=32, padding=16)
self.aux_classifier = aux_classifier
self.initial_weight()
def forward(self, x):
result = OrderedDict()
input_shape = x.shape[-2:]
# pool1 scaling = 1/4 channel = 256
# pool2 scaling = 1/8 channel = 512
# pool3 scaling = 1/16 channel = 1024
# pool4 scaling = 1/32 channel = 2048
pool1, pool2, pool3, pool4 = self.backbone(x)
# pool1_same_channel scaling = 1/4 channel = num_classes
# pool2_same_channel scaling = 1/8 channel = num_classes
# pool3_same_channel scaling = 1/16 channel = num_classes
# pool4_same_channel scaling = 1/32 channel = num_classes
pool1_same_channel = self.pool1_FCNHead(pool1)
pool2_same_channel = self.pool2_FCNHead(pool2)
pool3_same_channel = self.pool3_FCNHead(pool3)
pool4_same_channel = self.pool4_FCNHead(pool4)
if self.aux_classifier is not None:
result["aux"] = self.up_score32(pool4_same_channel)
# merge x and pool3 scaling = 1/16
x = self.up_score2(pool4_same_channel) + pool3_same_channel
# merge x and pool2 scaling = 1/8
x = self.up_score2(x) + pool2_same_channel
# merge x and pool2 scaling = 1/4
x = self.up_score2(x) + pool1_same_channel
# scaling = 1
result["out"] = self.up_score4(x)
return result
def initial_weight(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='leaky_relu')
elif isinstance(m, (nn.BatchNorm2d, nn.GroupNorm)):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
elif isinstance(m,nn.ConvTranspose2d):
m.weight = torch.nn.Parameter(self.bilinear_kernel(m.in_channels,m.out_channels,m.kernel_size[0]))
def bilinear_kernel(self, in_channels, out_channels, kernel_size):
factor = (kernel_size + 1) // 2
if kernel_size % 2 == 1:
center = factor - 1
else:
center = factor - 0.5
og = np.ogrid[:kernel_size, :kernel_size]
filt = (1 - abs(og[0] - center) / factor) * \
(1 - abs(og[1] - center) / factor)
weight = np.zeros((in_channels, out_channels, kernel_size, kernel_size), dtype='float32')
weight[range(in_channels), range(out_channels), :, :] = filt
return torch.from_numpy(weight)
完整代码
上采样 最近插值 双线性插值
>>> input = torch.arange(1, 5, dtype=torch.float32).view(1, 1, 2, 2) >>> input tensor([[[[ 1., 2.], [ 3., 4.]]]]) >>> m = nn.Upsample(scale_factor=2, mode='nearest') >>> m(input) tensor([[[[ 1., 1., 2., 2.], [ 1., 1., 2., 2.], [ 3., 3., 4., 4.], [ 3., 3., 4., 4.]]]]) >>> m = nn.Upsample(scale_factor=2, mode='bilinear') # align_corners=False >>> m(input) tensor([[[[ 1.0000, 1.2500, 1.7500, 2.0000], [ 1.5000, 1.7500, 2.2500, 2.5000], [ 2.5000, 2.7500, 3.2500, 3.5000], [ 3.0000, 3.2500, 3.7500, 4.0000]]]]) >> m = nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True) >> m(input) tensor([[[[ 1.0000, 1.3333, 1.6667, 2.0000], [ 1.6667, 2.0000, 2.3333, 2.6667], [ 2.3333, 2.6667, 3.0000, 3.3333], [ 3.0000, 3.3333, 3.6667, 4.0000]]]]) >>> # Try scaling the same data in a larger tensor >>> >>> input_3x3 = torch.zeros(3, 3).view(1, 1, 3, 3) >>> input_3x3[:, :, :2, :2].copy_(input) tensor([[[[ 1., 2.], [ 3., 4.]]]]) >>> input_3x3 tensor([[[[ 1., 2., 0.], [ 3., 4., 0.], [ 0., 0., 0.]]]]) >>> m = nn.Upsample(scale_factor=2, mode='bilinear') # align_corners=False >>> # Notice that values in top left corner are the same with the small input (except at boundary) >>> m(input_3x3) tensor([[[[ 1.0000, 1.2500, 1.7500, 1.5000, 0.5000, 0.0000], [ 1.5000, 1.7500, 2.2500, 1.8750, 0.6250, 0.0000], [ 2.5000, 2.7500, 3.2500, 2.6250, 0.8750, 0.0000], [ 2.2500, 2.4375, 2.8125, 2.2500, 0.7500, 0.0000], [ 0.7500, 0.8125, 0.9375, 0.7500, 0.2500, 0.0000], [ 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000]]]]) >>> m = nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True) >>> # Notice that values in top left corner are now changed >>> m(input_3x3) tensor([[[[ 1.0000, 1.4000, 1.8000, 1.6000, 0.8000, 0.0000], [ 1.8000, 2.2000, 2.6000, 2.2400, 1.1200, 0.0000], [ 2.6000, 3.0000, 3.4000, 2.8800, 1.4400, 0.0000], [ 2.4000, 2.7200, 3.0400, 2.5600, 1.2800, 0.0000], [ 1.2000, 1.3600, 1.5200, 1.2800, 0.6400, 0.0000], [ 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000]]]])
参考
【翻译】https://www.cnblogs.com/xuanxufeng/p/6249834.html
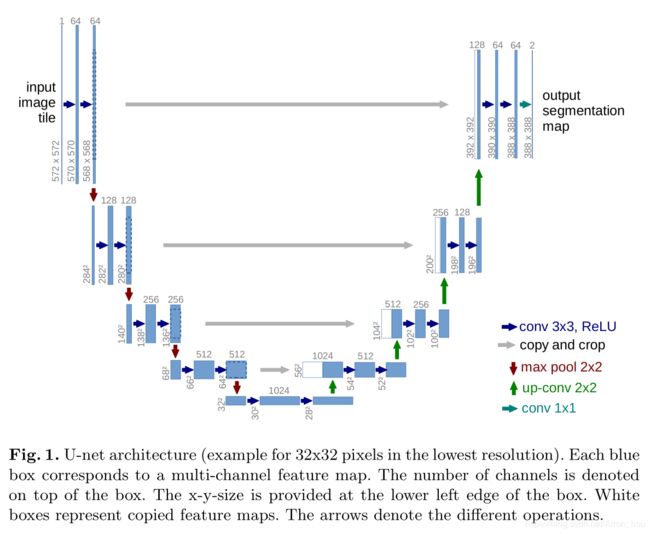
[U-Net] Convolutional Networks for Biomedical Image Segmentation 2015-05
https://arxiv.org/abs/1505.04597v1
U-Net结构与FCN类似。
区别主要在于:
FCN根据放缩的程度有8,16,32的版本,U-Net 每一次缩小feature map都有对应的上采样操作恢复到原来feature map size.
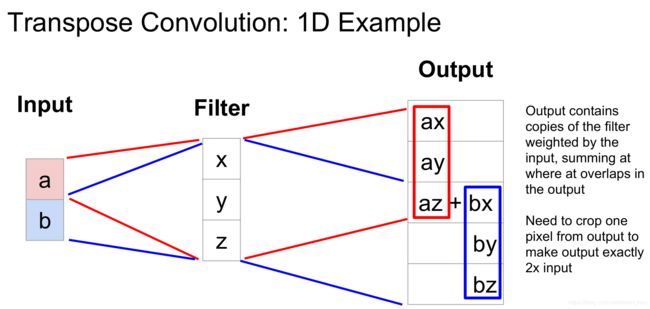
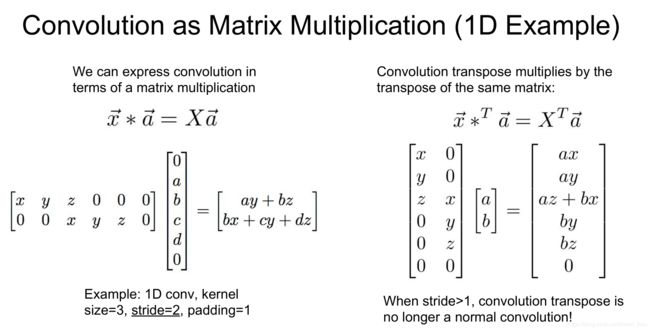
转置卷积
看动图
上图来自 CS231n

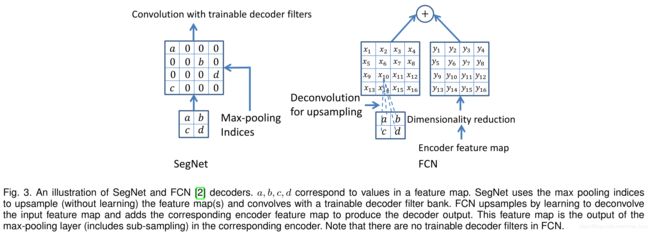
[SegNet] A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation 2015-11
https://arxiv.org/abs/1511.00561v3
SegNe类似于U-Net,但是为了减少冗余,通过记录pooling indices 将 encoder的信息输入到decoder之中。
1)提升边缘刻画度;
2)减少训练的参数;
3)这种上采样模式可以包含到任何编码-解码网络中。

MaxUnpool1d
>>> pool = nn.MaxPool1d(2, stride=2, return_indices=True) >>> unpool = nn.MaxUnpool1d(2, stride=2) >>> input = torch.tensor([[[1., 2, 3, 4, 5, 6, 7, 8]]]) >>> output, indices = pool(input) >>> unpool(output, indices) tensor([[[ 0., 2., 0., 4., 0., 6., 0., 8.]]]) >>> # Example showcasing the use of output_size >>> input = torch.tensor([[[1., 2, 3, 4, 5, 6, 7, 8, 9]]]) >>> output, indices = pool(input) >>> unpool(output, indices, output_size=input.size()) tensor([[[ 0., 2., 0., 4., 0., 6., 0., 8., 0.]]]) >>> unpool(output, indices) tensor([[[ 0., 2., 0., 4., 0., 6., 0., 8.]]])MaxUnpool2d
>>> pool = nn.MaxPool2d(2, stride=2, return_indices=True) >>> unpool = nn.MaxUnpool2d(2, stride=2) >>> input = torch.tensor([[[[ 1., 2, 3, 4], [ 5, 6, 7, 8], [ 9, 10, 11, 12], [13, 14, 15, 16]]]]) >>> output, indices = pool(input) >>> unpool(output, indices) tensor([[[[ 0., 0., 0., 0.], [ 0., 6., 0., 8.], [ 0., 0., 0., 0.], [ 0., 14., 0., 16.]]]]) >>> # specify a different output size than input size >>> unpool(output, indices, output_size=torch.Size([1, 1, 5, 5])) tensor([[[[ 0., 0., 0., 0., 0.], [ 6., 0., 8., 0., 0.], [ 0., 0., 0., 14., 0.], [ 16., 0., 0., 0., 0.], [ 0., 0., 0., 0., 0.]]]])