tp5.1集成workerman将业务代码放到控制器并且可以使用命令启动多个业务代码
之前写过一篇博客,介绍把wokerman的回调函数定义到thinkphp的控制其中,并通过命令启动.
tp5.1最新版集成workerman如何自定义命令并把业务逻辑写到控制器里
但是有局限性,那篇文章是在windows下实现的,linux不能直接使用,并且一次命令只能启动一个控制器,就是说你有两个控制器需要后台启动,无法用一条命令启动.本片文章为解决这个需求的解决方案.但是只适合linux版本.不兼容windwos.
需求目标
- 把业务逻辑写到控制器里
- 不同的业务写到不同的控制器
- 可以通过命令启动指定或全部的业务代码
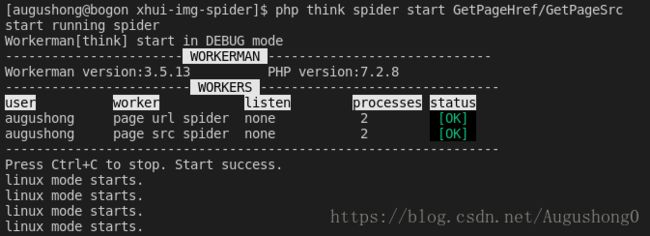
即以下命令可以启动getPageHref和getPageSrc两个控制器代码
php think spider start GetPageHref/GetPageSrc上面命令运行的效果(每个控制器也可以启动不同的进程数,但这都是在业务代码实现的),命令行可以选择启动不同的代码或全部代码.
workerman系统兼容介绍
workerman的windwos版本和linux核心逻辑不同,在解析命令,使用扩展,子进程方式都不同,在实现如题需求时遇到以下兼容问题:
- 解析命令不同,具体可查看两个版本的worker文件
- 启动扩展不同,linux使用了posix扩展
- 子进程方式不同,其导致了windwos不能在同一文件启动多个woker,也让在linux下如题需求得以解决,具体参见手册.入口
thinkphp自定义指令
详细请参考手册.
为了定义该命令,我们修改了application/command.php文件如下
return [
'app\common\command\Spider',
];
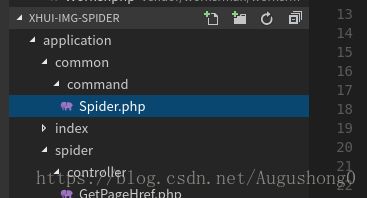
建立相关目录文件:
Spider.php的基本指令代码,等下会有全部的代码,可以复制使用.
/**
* configure
* tp框架自定义指令特性
* 注册命令参数
* @return mixed
*/
protected function configure()
{
$this->setName('spider')
->addArgument('status', Argument::OPTIONAL, "status")
->addArgument('controller_name', Argument::OPTIONAL, "controller_name/controller_name")
->addArgument('mode', Argument::OPTIONAL, "d")
->setDescription('spider control');
/**
* 以上设置命令格式为:php think spider [status] [controller_name/controller_name] [d]
* think 为thinkphp框架入口文件
* spider 为在框架中注册的命令,上面setName设置的
* staus 为workerman框架接受的命令
* controller_name/controller_name 为控制器名称,以正斜线分割,执行制定控制器,为空或缺省则启动所有控制器,控制器列表在controller_name属性中注册
* d 最后一个参数为wokerman支持的-d-g参数,但是不用加-,直接使用d或者g
*/
}
上面的代码是thinkphp的特性所支持的内容,基本的内容是,设置指令名称为"spider"并接受其他参数,
以上设置可以接受以下形式的命令.
php think spider start
php think spider start all d
php think spider start GetPageHref d介绍逻辑
运行中,我们发现workerman原生地解析命令行方法不适用,所以需要重写,因此:
- 新建一个Start.php控制器当作业务基类.
- 该控制器继承worker.
- 该控制器重写parseCommand()方法.
- 为了实现重写,添加静态属性argvs.
start.php代码,该部分代码可以直接复制使用.其中所有逻辑都是worker原生的没有改动,只是改动了参数数组.原有的是直接在命令行获取,现在改称从静态属性获取.
[mode]\nCommands: \nstart\t\tStart worker in DEBUG mode.\n\t\tUse mode -d to start in DAEMON mode.\nstop\t\tStop worker.\n\t\tUse mode -g to stop gracefully.\nrestart\t\tRestart workers.\n\t\tUse mode -d to start in DAEMON mode.\n\t\tUse mode -g to stop gracefully.\nreload\t\tReload codes.\n\t\tUse mode -g to reload gracefully.\nstatus\t\tGet worker status.\n\t\tUse mode -d to show live status.\nconnections\tGet worker connections.\n";
if (!isset(static::$argvs[1]) || !in_array(static::$argvs[1], $available_commands)) {
if (isset(static::$argvs[1])) {
static::safeEcho('Unknown command: ' . static::$argvs[1] . "\n");
}
exit($usage);
}
// Get command.
$command = trim(static::$argvs[1]);
$command2 = isset(static::$argvs[2]) ? static::$argvs[2] : '';
// Start command.
$mode = '';
if ($command === 'start') {
if ($command2 === '-d' || static::$daemonize) {
$mode = 'in DAEMON mode';
} else {
$mode = 'in DEBUG mode';
}
}
static::log("Workerman[$start_file] $command $mode");
// Get master process PID.
$master_pid = is_file(static::$pidFile) ? file_get_contents(static::$pidFile) : 0;
$master_is_alive = $master_pid && posix_kill($master_pid, 0) && posix_getpid() != $master_pid;
// Master is still alive?
if ($master_is_alive) {
if ($command === 'start') {
static::log("Workerman[$start_file] already running");
exit;
}
} elseif ($command !== 'start' && $command !== 'restart') {
static::log("Workerman[$start_file] not run");
exit;
}
// execute command.
switch ($command) {
case 'start':
if ($command2 === '-d') {
static::$daemonize = true;
}
break;
case 'status':
while (1) {
if (is_file(static::$_statisticsFile)) {
@unlink(static::$_statisticsFile);
}
// Master process will send SIGUSR2 signal to all child processes.
posix_kill($master_pid, SIGUSR2);
// Sleep 1 second.
sleep(1);
// Clear terminal.
if ($command2 === '-d') {
static::safeEcho("\33[H\33[2J\33(B\33[m", true);
}
// Echo status data.
static::safeEcho(static::formatStatusData());
if ($command2 !== '-d') {
exit(0);
}
static::safeEcho("\nPress Ctrl+C to quit.\n\n");
}
exit(0);
case 'connections':
if (is_file(static::$_statisticsFile) && is_writable(static::$_statisticsFile)) {
unlink(static::$_statisticsFile);
}
// Master process will send SIGIO signal to all child processes.
posix_kill($master_pid, SIGIO);
// Waiting amoment.
usleep(500000);
// Display statisitcs data from a disk file.
if(is_readable(static::$_statisticsFile)) {
readfile(static::$_statisticsFile);
}
exit(0);
case 'restart':
case 'stop':
if ($command2 === '-g') {
static::$_gracefulStop = true;
$sig = SIGTERM;
static::log("Workerman[$start_file] is gracefully stopping ...");
} else {
static::$_gracefulStop = false;
$sig = SIGINT;
static::log("Workerman[$start_file] is stopping ...");
}
// Send stop signal to master process.
$master_pid && posix_kill($master_pid, $sig);
// Timeout.
$timeout = 5;
$start_time = time();
// Check master process is still alive?
while (1) {
$master_is_alive = $master_pid && posix_kill($master_pid, 0);
if ($master_is_alive) {
// Timeout?
if (!static::$_gracefulStop && time() - $start_time >= $timeout) {
static::log("Workerman[$start_file] stop fail");
exit;
}
// Waiting amoment.
usleep(10000);
continue;
}
// Stop success.
static::log("Workerman[$start_file] stop success");
if ($command === 'stop') {
exit(0);
}
if ($command2 === '-d') {
static::$daemonize = true;
}
break;
}
break;
case 'reload':
if($command2 === '-g'){
$sig = SIGQUIT;
}else{
$sig = SIGUSR1;
}
posix_kill($master_pid, $sig);
exit;
default :
if (isset($command)) {
static::safeEcho('Unknown command: ' . $command . "\n");
}
exit($usage);
}
}
}
执行命令时,主要的逻辑是:
- 实例化指定(或全部)控制器.
- 将其绑定到start类中.
- 运行start.
此时体现了linux版的workerman的好处,可以在统一文件中建立多个woker对象,并通过runAll()运行所有对象,也正是这个特性是的以上解决方式能够实现.
在windwos中如果希望一条命令运行多个worker对象,必须建立多个文件,每个文件是各自的worker对象. 即 php a.php b.php c.php
具体请参考手册.
Spider.php代码
setName('spider')
->addArgument('status', Argument::OPTIONAL, "status")
->addArgument('controller_name', Argument::OPTIONAL, "controller_name/controller_name")
->addArgument('mode', Argument::OPTIONAL, "d")
->setDescription('spider control');
/**
* 以上设置命令格式为:php think spider [status] [controller_name/controller_name] [d]
* think 为thinkphp框架入口文件
* spider 为在框架中注册的命令,上面setName设置的
* staus 为workerman框架接受的命令
* controller_name/controller_name 为控制器名称,以正斜线分割,执行制定控制器,为空或缺省则启动所有控制器,控制器列表在controller_name属性中注册
* d 最后一个参数为wokerman支持的-d-g参数,但是不用加-,直接使用d或者g
*/
}
/**
* execute
* tp框架自定义指令特性
* 执行命令后的逻辑
* @param mixed $input
* @param mixed $output
* @return mixed
*/
protected function execute(Input $input, Output $output)
{
//获得status参数,即think自定义指令中的第一个参数,缺省报错
$status = $input->getArgument('status');
if(!$status){
$output->writeln('pelase input control command , like start');
exit;
}
//获得控制器名称
$controller_str = $input->getArgument('controller_name');
//获得模式,d为wokerman的后台模式(生产环境)
$mode = $input->getArgument('mode');
//分析控制器参数,如果缺省或为all,那么运行所有注册的控制器
$controller_list = $this->controller_names;
if($controller_str != '' && $controller_str != 'all' )
{
$controller_list = explode('/',$controller_str);
}
//重写mode参数,改为wokerman接受的参数
if($mode == 'd'){
$mode = '-d';
}
if($mode == 'g'){
$mode = '-g';
}
//将wokerman需要的参数传入到其parseCommand方法中,此方法在start类中重写
Start::$argvs = [
'think',
$status,
$mode
];
$output->writeln('start running spider');
$programs_ob_list = [];
//实例化需要运行的控制器
foreach ($controller_list as $c_key => $controller_name) {
$class_name = 'app\\'.$this->model_name.'\controller\\'.$controller_name;
$programs_ob_list[] = new $class_name();
}
//将控制器的相关回调参数传到workerman中
foreach (['onWorkerStart', 'onConnect', 'onMessage', 'onClose', 'onError', 'onBufferFull', 'onBufferDrain', 'onWorkerStop', 'onWorkerReload'] as $event) {
foreach ($programs_ob_list as $p_key => $program_ob) {
if (method_exists($program_ob, $event)) {
$programs_ob_list[$p_key]->$event = [$program_ob,$event];
}
}
}
Start::runAll();
}
}简单介绍下以上代码:
- 创建指令,如开头介绍.
- 注册控制器名称,当命令缺省是,运行这些注册器.
- 解析命令中的控制器名称,如果命令中有指定控制器,那么就运行指定的控制器.
- 解析命令中的参数,将worker需要的参数通过静态属性argvs传递过去.
- 将控制器的onWorkerStart等方法绑定到各自实例化的Start类属性(本质上是worker类)中,作回调参数.
- 执行Start运行方法.
业务代码写法
tools();
}
public function tools()
{
//相关逻辑
}
}介绍:
- 声明命名空间,请学习tp手册.
- 使用Start基类,如上文介绍,该类重写了worker的parseCommand方法
- 继承Start基类.
- 正常写逻辑,其中worker指定的方法名会绑定为回调函数,比如上面代码中onWorkerStart方法,会在workerman运行是调用.
- 也可以设置正常的worker属性,比如count指定进程数,name指定进程名称,id为进程id.
最终效果

其中:
- application\command.php,为注册thinkphp指定命令.
- application\common\command\Spider.php,为设置自定义指令参数和逻辑.注册控制器.
- application\spider\controller\Start.php,该类继承worker类,其他业务文件应当继承此类.此类重写worker方法.
- application\spider\controller\GetPageSrc.php,一般的业务文件,应当继承Start类.
要注意:
如果一个业务控制器文件需要运行,那么应当在Spider.php注册控制器.
