K-SVD Algorithm
1. 算法简介
K-SVD可以看做K-means的一种泛化形式,K-means算法总每个信号量只能用一个原子来近似表示,而K-SVD中每个信号是用多个原子的线性组合来表示的。
K-SVD通过构建字典来对数据进行稀疏表示,经常用于图像压缩、编码、分类等应用。
2. 主要问题
Y = DX
Where Y∈R(n*N), D∈R(n*K), X∈R(k*N), X is a sparse matrix.
N is number of samples;
n is dimension of feature /dimension of every word in dictionary;
K is the length of a coefficient/the number of atoms in the trained dictionary..

Y为要表示的信号,D为超完备矩阵(列数大于行数), X为系数矩阵,X与Y按列对应,表示D中元素按照Xi为系数线性组合为Y,
![]()
![]()
上面的式子本质上是相通的,只是表述形式不一样罢了。
寻找最优解(X最稀疏)是NP-Hard问题。
用追逐算法(Pursuit Algorithm)得到的次优解代替。
MatchingPursuit (MP)
OrthogonalMatching Pursuit (OMP)
BasisPursuit (BP)
FocalUnderdetermined System Solver (FOCUSS)
3. 算法求解
给定训练数据后一次找到全局最优的字典为NP问题,只能逐步逼近最优解.构造D算法分两步:稀疏表示和字典更新
稀疏表示
首先设定一个初始化的字典,用该字典对给定数据迚行稀疏表示(即用尽量少的系数尽可能近似地表示数据),得到系数矩阵X。此时,应把DX看成D中每列不X中对应每行乘积的和,也就是把DX分“片”,即:
(di 表示D的列 , xi表示X的行),然后逐片优化。
字典更新
初始字典往往不是最优的,满足稀疏性的系数矩阵表示的数据和原数据会有较大误差,我们需要在满足稀疏度的条件下逐行逐列更新优化,减小整体误差,逼近可用字典。剥离字典中第k(1-K)项dk的贡献,计算当前表示误差矩阵:
![]()
误差值为 :
求解流程
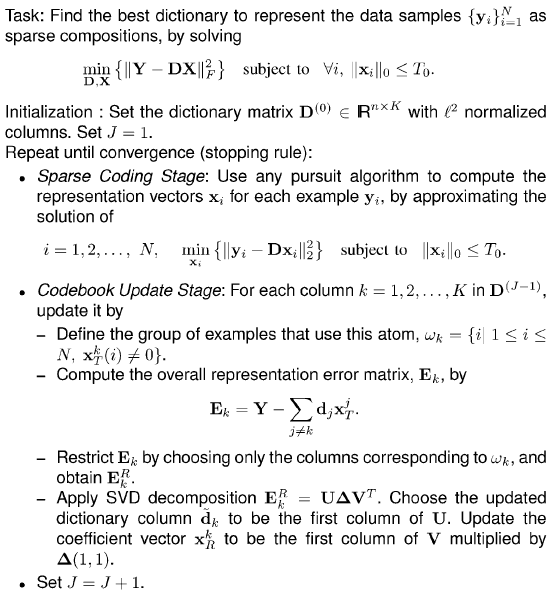
K-SVD的求解是一个迭代过程。首先,假设字典D是固定的,用MP、OMP、BP等算法,可以得到字典D上,Y的稀疏表示的系数系矩阵X,然后让X固定,根据X更新字典D,如此循环直到收敛为止。
字典D的更新是逐列进行的。首先假设系数矩阵X和字典D都是固定的,将要更新的是字典的第k列dk ,系数矩阵X中dk对应第k行为![]() ,则
,则
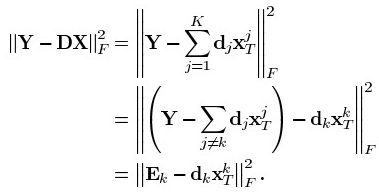
得到当前误差矩阵Ek后,我们只需要调整dk和xk,使其乘积与Ek的误差尽可能的小。
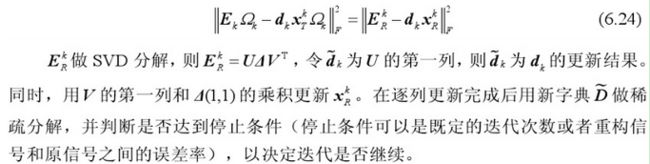
对于上面的问题,如果直接用Ek的SVD分解结果来更新dk和xk,则会导致xk不稀疏,出现"发散"。换句话说,![]() 与更新dk前
与更新dk前![]() 的非零元所处位置和value不一样。怎么办呢?我们可以只保留系数中的非零值,再进行SVD分解就不会出现这种现象了。所以对Ek和
的非零元所处位置和value不一样。怎么办呢?我们可以只保留系数中的非零值,再进行SVD分解就不会出现这种现象了。所以对Ek和![]() 做变换,
做变换,![]() 中只保留x中非零位置的,Ek只保留dk和
中只保留x中非零位置的,Ek只保留dk和![]() 中非零位置乘积后的那些项。形成
中非零位置乘积后的那些项。形成![]() ,将
,将![]() 做SVD分解,更新dk。
做SVD分解,更新dk。
具体如下:

算法流程
关于SVD分解可以参考:http://www.cnblogs.com/LeftNotEasy/archive/2011/01/19/svd-and-applications.html