Opencv学习
头文件介绍
导图
管理态对象内存、处理轮廓
OpenCV使用==Memory Storage== 来统一管理各种动态对象的内存
使用==sequence==处理轮廓,是Memory Storage中可存储的一种对象
XML\YAML文件打开
在OpenCV中的数据结构为FileStorage,打开操作例如:
string filename = "I.xml";
FileStorage fs(filename, FileStorage::WRITE);
\\...
fs.open(filename, FileStorage::READ);直方图显示
void Histget(const Mat src)
{
vector图像尺寸变换
- resize 常规方法
void resize(Mat inputImg,Mat outputImg,Size dsize,
double fx,double fy,
int interpolation=, CV_INTER_AREA);
//其中 dsize可以通过Size来定义
// Size dsize=Size(Img.rows,Img.cols*2);
//fx,fy与dsize不能同时为0,
//interpolation控制新增像素
//INTER_NEAREST - 最近邻插值
//INTER_LINEAR - 线性插值(默认值)
//INTER_AREA - 区域插值(利用像素区域关系的重采样插值)
//INTER_CUBIC –三次样条插值(超过4×4像素邻域内的双三次插值)
//INTER_LANCZOS4 -Lanczos插值(超过8×8像素邻域的Lanczos插值)- 图像金字塔
分为pyrUp(向上采样)和pyrDown(向下采样),二者不互逆
void pyrUp(InputMat src, OutputMat dst, Size dsize,
int borderType=BORDER_DEFAULT )
resize可以一次性将原图像变为任意不为0的尺寸,适合用来做归一化图像操作;而pyrDown与pyrUp适合做长宽比率不变得操作,且调用一次只能变为1/2或者2倍~~~
可以参考CSDN链接讲解
图像结构形状描述
void findContours();//得到轮廓区域的参数
Hough Transformation
- 在二值图中快速准确得出直线和圆
分为两种:
- 标准hough变换
- 统计hough变换
步骤:
1. 提取图像,并进行canny边缘提取
2. 进行灰度转换,再经过hough变换
3. 输出hough图像
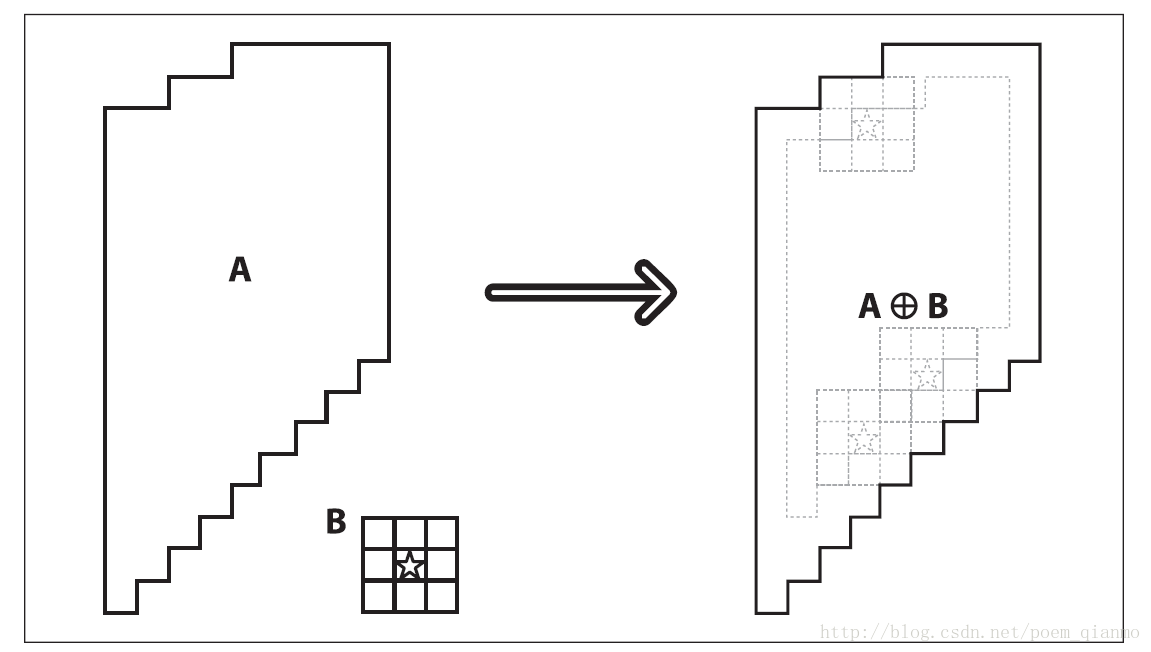
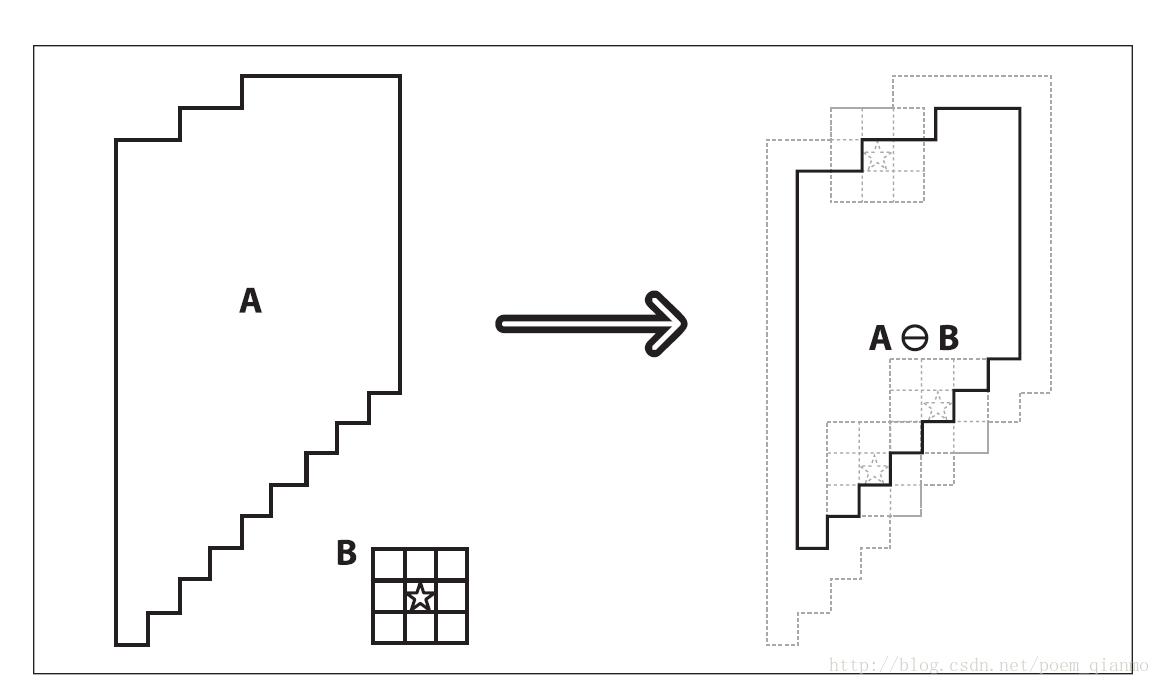
vector腐蚀、膨胀
膨胀
腐蚀
Mat element=getStructuringElement(MORPH_RECT, Size(5, 5));
//矩形: MORPH_RECT
//交叉形: MORPH_CROSS
//椭圆形: MORPH_ELLIPSE
void cv::dilate(src,src1,element);
void cv::erode(src,src1,element);
访问像素
例如产生随机椒盐噪声
i=std::rand()%img.cols;
j=std::rand()%img.rows;
if (img.type()==CV_8UC1)
img.at(I,j)=255;//二值图访问
else if (img.type()==CV_8UC3)
Img.at<cv::vec3b>(I,j)[1]=255;//三通道图片访问
Img.at<cv::vec3b>(I,j)[2]=255;
Img.at<cv::vec3b>(I,j)[3]=255;