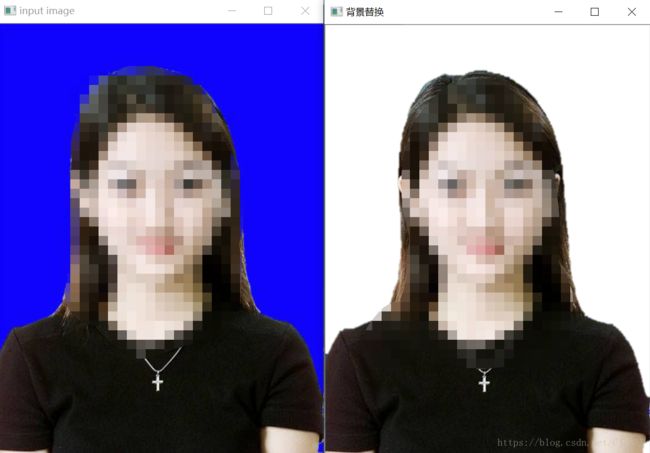
OpenCV之图像分割(五) 证件照背景替换
算法设计步骤:

代码与注释:
/*
流程处理思路:
先通过Kmeans训练,目的为了得到背景像素的一个标记(个人觉得没有这个必要,性价比太低了)
利用这个标记跟证件照的原图进行一波处理,得到背景跟前景的一个(0跟255)的分开,架构这个作为mask
对这个马mask进行一波骚操作,目的是为了后面的羽化边缘,得到更加精确的效果,
羽化边缘有几种思路:先讲下这种的,即
利用3X3的内核去掉一个边界像素,再利用高斯模糊得到梯度边缘,得到这个之后,再最后的一步操作中,
会根据梯度的高低赋予不同的边界像素,即由权重得到边界值
最后的操作是根据mask的值赋予不同的值
如果是0则为背景像素
如果是255则为证件照的前景像素
其他的值就根据梯度的大小,权重进行重新赋值
*/
#include
#include
using namespace cv;
using namespace std;
Mat labels;
Mat centers;
Mat mat_to_samples(Mat &image);
int main(int argc, char** argv) {
Mat src = imread("toux.jpg");
if (src.empty()) {
printf("could not load image...\n");
return -1;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src);
// 组装数据
int w1 = src.cols;
int h = src.rows;
int samplecount = w1*h;
int dims = src.channels();
Mat points(samplecount, dims, CV_32F, Scalar(10));
int index1 = 0;
for (int row = 0; row < h; row++) {
for (int col = 0; col < w1; col++) {
index1 = row*w1 + col;
Vec3b bgr = src.at(row, col);
points.at(index1, 0) = static_cast(bgr[0]);
points.at(index1, 1) = static_cast(bgr[1]);
points.at(index1, 2) = static_cast(bgr[2]);
}
}
// 运行KMeans
int numCluster = 4;
TermCriteria criteria = TermCriteria(TermCriteria::EPS + TermCriteria::COUNT, 10, 0.1);
kmeans(points, numCluster, labels, criteria, 3, KMEANS_PP_CENTERS, centers);
//我觉得没有必要用这个,毕竟这个的价值只是为了找到背景的标记罢了,
//用那么多的时间换取这个,成本太大而收益太低了
// 去背景+遮罩生成
Mat mask = Mat::zeros(src.size(), CV_8UC1);
int index = src.rows * 2 + 2;
int cindex = labels.at(index, 0);
int height = src.rows;
int width = src.cols;
for (int row = 0; row < height; row++) {
for (int col = 0; col < width; col++) {
index = row*width + col;
int label = labels.at(index, 0);
if (label == cindex) {
// 背景
//dst.at(row, col)[0] = 0;
//dst.at(row, col)[1] = 0;
//dst.at(row, col)[2] = 0;
mask.at(row, col) = 0;
}
else {
mask.at(row, col) = 255;
}
}
}
//imshow("mask", mask);
// 腐蚀 + 高斯模糊
Mat mask_morph, mask_blur;
Mat k = getStructuringElement(MORPH_RECT, Size(7, 7), Point(-1, -1));
erode(mask, mask_morph, k); //腐蚀操作后的图像白色边界少了一个边界像素,是全部的轮廓边界
//imshow("erode-mask", mask);
//更新一个骚操作,以前不知道,原来3X3的内核去掉的是广义上的一个边界像素,5X5去掉的是两个边界像素,真香哈哈哈~
GaussianBlur(mask_morph, mask_blur, Size(3, 3), 0, 0);
//imshow("Blur Mask", mask); //使得边界高斯模糊了原本的0跟255变成0,64,191,255
/*
为什么要进行这步操作呢?
1.羽化边界,先通过形态学腐蚀,为了是轮廓边界在”腐蚀 + 高斯模糊“ 操作后,轮廓边缘的像素保持不变
高斯模糊的原因在于将原本的0跟255的像素变成0,64,191,255,使得边界不会发生突变,可以起到羽化的作用
*/
// 通道混合
RNG rng(12345);
Vec3b color;
color[0] = 217;//rng.uniform(0, 255);
color[1] = 60;// rng.uniform(0, 255);
color[2] = 160;// rng.uniform(0, 255);
Mat result(src.size(), src.type());
double w = 0.0;
int b = 0, g = 0, r = 0;
int b1 = 0, g1 = 0, r1 = 0;
int b2 = 0, g2 = 0, r2 = 0;
for (int row = 0; row < height; row++) {
for (int col = 0; col < width; col++) {
int m = mask_blur.at(row, col);
if (m == 255) {
result.at(row, col) = src.at(row, col); // 前景
}
else if (m == 0) {
result.at(row, col) = color; // 背景
}
else {
w = m / 255.0;
b1 = src.at(row, col)[0];
g1 = src.at(row, col)[1];
r1 = src.at(row, col)[2];
b2 = color[0];
g2 = color[1];
r2 = color[2];
b = b1*w + b2*(1.0 - w);
g = g1*w + g2*(1.0 - w);
r = r1*w + r2*(1.0 - w);
result.at(row, col)[0] = b;
result.at(row, col)[1] = g;
result.at(row, col)[2] = r;
}
}
}
imshow("背景替换", result);
waitKey(0);
return 0;
}
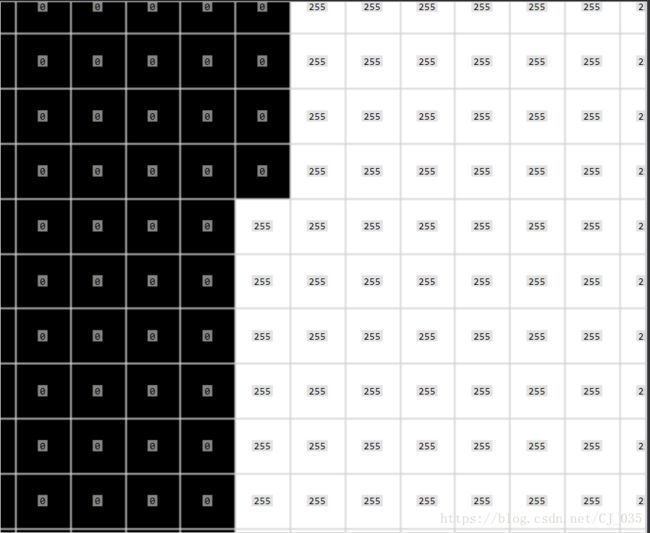
原本mask后的部分边缘像素:
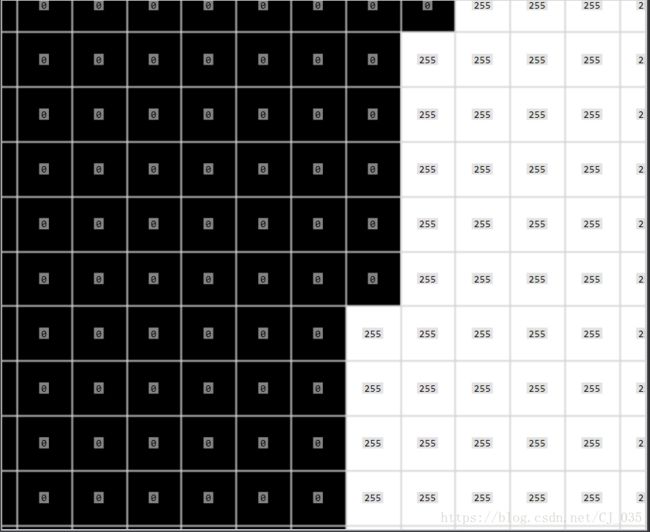
该部分继续腐蚀后的像素:边缘减少了2个像素有木有!因为我用的是(5X5)的内核
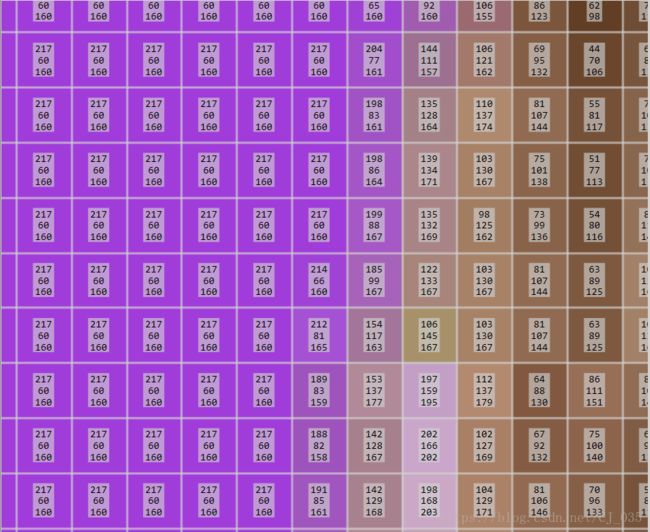
该部分继续高斯后的像素:得到梯度边缘

证件照最后的效果图:
效果图: