凸优化(Convex Optimization)浅析
凸优化(Convex Optimization)浅析
在机器学习中,很多情况下我们都需要求得一个问题的全局最优值(global optimum). 大多数的全局最优值很难求得, 但是对于凸问题,我们可以比较高效的找到其全局最优值, 这是由凸问题的性质决定的.我们将逐步的介绍凸集, 凸函数, 凸问题等.
1. 凸集(convex set)
对于一个集合 C ,如果对于任意两个元素 x,y∈C ),以及任意实数 θ∈R 且 0≤θ≤1 都满足
那么集合 C 就是凸集.如下图所示:

凸集的例子包括:
- Rn
- 非负象限 Rn+
- 范式球(Norm Ball), 亦即 x:∥x∥≤1 , 其中 ∥⋅∥ 是 Rn 上的范式
- 凸集的交集
- 半正定矩阵
2. 凸函数(convex function)
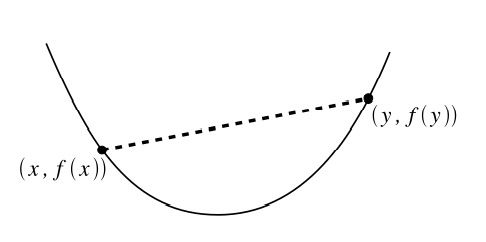
如果一个函数 f:Rn→R 的定义域 D(f) 是凸集, 并且对于所有的 x,y∈D(f) 和 θ∈R,0≤θ≤1 使得:
则函数 f(x) 是凸函数.
如果把上述限制条件改为对于任意的 x,y∈D(f),x≠y,0<θ<1
函数 f(x) 是严格凸(strictly convex)的.
如果 −f 是凸的, 则 f 是凹(concave)的.
凸函数如下图所示:
2.1 凸函数的一阶条件
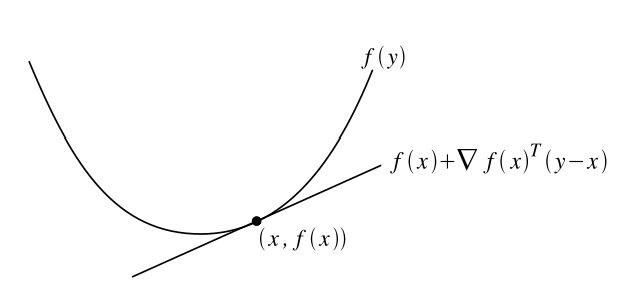
如果一个函数 f:Rn→R 是可微的, 那么 f 是凸函数当且仅当 D(f) 是凸集, 并且对于任意的 x,y∈D(f) :
其中 f(x)+∇xf(x)T(y−x) 称为 f 在点 x 处的一阶近似. 上述性质如下图所示:
2.2 凸函数的二阶条件
函数 f 是凸的当且仅当 D(f) 是凸集, 并且其Hessian矩阵是半正定的:
2.3 Jensen不等式
凸函数的定义中有
上式可以扩展到多个点的情况:
也可以扩展到无限多个点或者某个区间的情况:
亦即
上式称为Jensen不等式
2.4 Sublevel集合
α−sublevel 集合是凸集的一种, 对于一个函数 f:Rn→R , 以及一个实数 α∈R , α−sublevel 集合的定义为
可以很容易的证明上述集合是凸集, 对于 x,y∈D(f) 使得 f(x)≤α,f(y)≤α :
2.5 凸函数例子
指数函数: f:R→R,f(x)=eαx
负对数: f:R→R,f(x)=−logx
仿射函数: f:R→R,f(x)=bTx+c
二次函数: f:R→R,f(x)=12xTAx+bTx+c
范式: f:R→R,f(x)=∥x∥
凸函数的非负加权和:
3. 凸优化问题
凸优化问题的形式如下:
其中 f 是凸函数, C 凸集, x 是待优化的变量, 我们通常可以把其写成
其中 f 和 gi 是凸函数, hi 是仿射函数.
gi 必须小于等于0, 这样得到的 x 的可行域(feasible region)才是凸的(因为 gi(x)≤0 定义了一个 α−sublevel 集)
3.1 凸问题中的全局最优
凸问题的一个很好地特性是其局部最优解也是全局最优解.推导如下
首先定义局部最优解: 当 x 是可行的(亦即位于可行域内), 而且存在 R>0 , 使得对于所有 ∥x−z∥2≤R 的位于可行点 z ,使得 f(x)≤f(z) .
然后定义全局最优解: 如果 x 是可行的, 且对于其他所有的可行点 z 都有 f(x)≤f(z)
凸问题中的全局最优解等同于局部最优解, 证明如下:
令 x 是一个局部最优解, 但不是全局最优解, 所以存在一个可行的点 y 使得 f(x)>f(y) .根据局部最优解的定义, 没有一个可行点 z 满足 ∥x−z∥2≤R,f(z)<f(x) . 但是, 我们可以选择
那么
另外, 因为 f 是凸函数, 所以
因为可行域是凸集, x , y 都是可行的, 所以 z=θy+(1−θ)x 也是可行的, 且 ∥x−z∥2<R,f(z)<f(x) , 假设不成立,所以 x 是全局最优解.
3.2 凸问题的例子
线性规划(LP, Linear Programming):
二次规划(QP, Quadratic Programming):
二次限制的二次优化(QCQP, quadratically constrained QP):
半定规划(Semidefinite Programming):
参考文献:
[1]. Zico Kolter, Honglak Lee. Convex Optimization Overview.
[2]. Stephen Boyd, Lieven Vandenberghe. Convex Optimization.
声明:
本文转载自凸优化(Convex Optimization)浅析——博客园kemaswill.对原作者的付出表示感谢.版权归原作者所有.