吴恩达深度学习课程笔记(二):改善深层神经网络
吴恩达深度学习课程笔记(二):改善深层神经网络
- 吴恩达深度学习课程笔记(二):改善深层神经网络
- 第一周 深度学习的实用层面
- 1.1 训练 / 开发 / 测试集
- 1.2 偏差 / 方差
- 1.3 机器学习基础
- 1.4 正则化
- 1.5 为什么正则化可以减少过拟合?
- 1.6 Dropout 正则化
- 1.7 理解 Dropout
- 1.8 其他正则化方法
- 1.9 归一化输入
- 1.10 梯度消失与梯度爆炸
- 1.11 神经网络的权重初始化
- 1.12 梯度的数值逼近
- 1.13 梯度检验
- 1.14 关于梯度检验实现过程中的注意事项
- 第二周 优化算法
- 2.1 Mini-batch 梯度下降法
- 2.2 理解 mini-batch 梯度下降法
- 选择mini-batch size:
- 选择mini batch size 的指导原则
- 选择mini-batch size:
- 2.3 指数加权平均
- 2.4 理解指数加权平均
- 2.5 指数加权平均的偏差修正
- 2.6 动量梯度下降法Gradient descent with momentum
- 标准梯度下降的缺点:
- momentum 梯度下降:
- 2.7 RMSprop
- 2.8 Adam 优化算法
- 2.9 学习率衰减
- 为什么要计算学习率衰减?
- 如何进行学习率衰减?
- 其他学习率衰减的办法
- 2.10 局部最优的问题
- 鞍点
- 平稳段问题
- 第三周 超参数调试、Batch Normalization和程序框架
- 3.1 超参数调整
- 超参数重要程度分级
- 随机
- 3.2 为超参数选择合适的范围
- 给αα\alpha取值
- 给ββ\beta取值(给有指数加权平均值的超参数取值)
- 3.3 超参数调整的实践:Pandas VS Caviar
- 3.4 batch normalization(归一化网络的激活函数)
- 优点:
- normalizing inputs to speed up learning
- 实现Batch Norm
- 3.5 将 Batch Norm加入到神经网络
- BN加入到神经网络
- BN working with mini-batches
- 实现带BN的梯度下降:
- 3.6 Batch Norm 为什么奏效?
- covariate shift 问题:
- 减弱covariate shift
- BN的轻微正则化
- 3.7 测试时的 Batch Norm
- 3.8 Softmax 回归
- 3.9 训练一个 Softmax 分类器
- hard vs soft
- 理解softmax回归
- 损失函数loss function
- 代价函数cost function
- 3.10 深度学习框架
- 3.11 TensorFlow
- 3.1 超参数调整
- 第一周 深度学习的实用层面
第一周 深度学习的实用层面
1.1 训练 / 开发 / 测试集
- 应用机器学习算法是一个高度迭代的过程。从一开始的idea,一直要进行不断的尝试、更新。超参数的选择就在这个不断地迭代尝试过程中产生。
- 创建高质量的训练集、验证集、测试集有助于提高迭代效率。
- 训练集训练几个模型;验证集选出最好的模型;在测试集上评估该模型的性能。
- 在小数据时代,可以60%/20%/20%;
- 在大数据时代,验证集和测试集的比例更小;比如1 000 000 条数据,可能取10000条进行验证即可。
训练集和测试集分布不匹配的情况很多:
- 训练猫咪图像分类,训练集图片来组互联网,高清,制作精良;验证集和测试集图像来自用户手机拍摄,质量差,像素低,模糊;
- 经验:确保验证集和测试集的数据来自同一分布。
- 经验:就算没有测试集也ok,测试集的目的是对最后的模型做出无偏的评估,但是如果不需要无偏的评估,就可以不设置测试集。
如果没有测试集,仅有训练集和验证集,那么这个时候验证集被有些人们称之为测试集,但其实这个“测试集”起到的是验证集的作用。所以叫做测试集是错误的。只有两个划分的时候,就只有训练集和验证集。
- 验证集和测试集可以加速神经网络的集成。也可以更有效的衡量算法的偏差和方差。
1.2 偏差 / 方差
通过训练集的误差和验证集的误差查看:
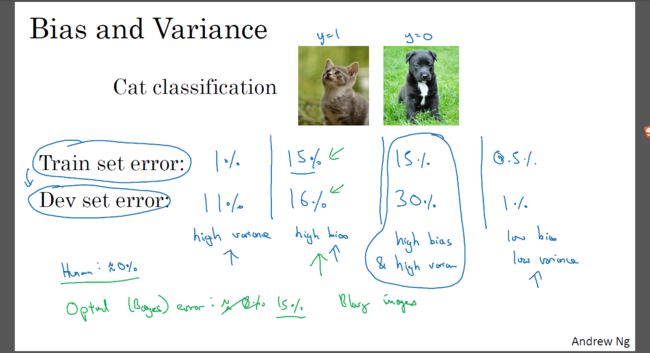
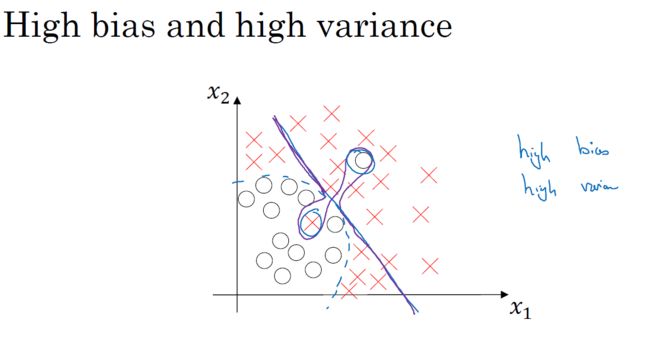
存在高偏差高方差的情况:
上述结论是在基础误差很小的情况下成立的。
1.3 机器学习基础
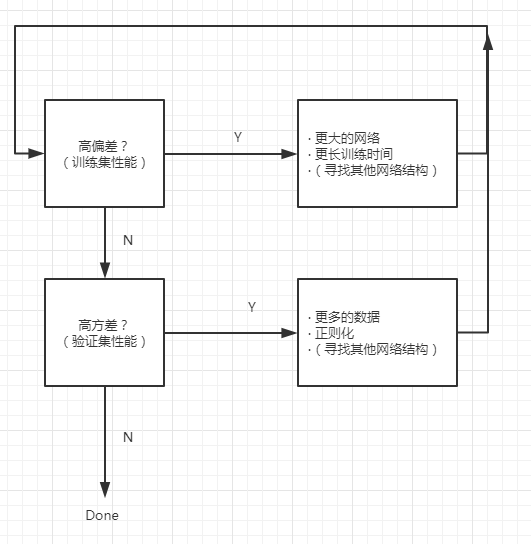
- 用训练集和验证集检测模型是否存在高偏差or高方差问题。
- 机器学习早期存在方差偏差平衡问题。
- 在大数据和深度学习时代,可以做到只降低偏差(方差),而基本不影响方差(偏差),即在降低一方的同时,不过多影响另一方。比如:
- 适度正则化的情况下,更大的network可以在不影响方差的情况下降低偏差;
- 用更多的数据训练网络能够在不过多影响偏差的情况下降低方差。
在大数据和深度学习时代,不用过多关心如何平衡偏差和方差。这是大数据和深度学习带来的一个益处。
在网络比较规范的情况下,训练一个更大的网络的主要代价也只是计算时间(or算力)。其他负面影响很小。
1.4 正则化
regularization
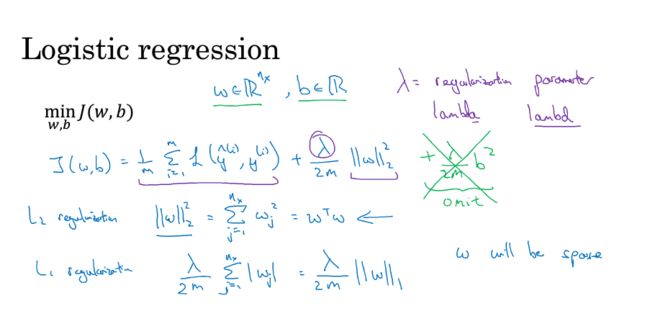
逻辑回归:
J(w,b)=1m∑mi=1L(y^(i),y(i))+λ2m||w||22 J ( w , b ) = 1 m ∑ i = 1 m L ( y ^ ( i ) , y ( i ) ) + λ 2 m | | w | | 2 2L2 L 2 正则化: λ2m||w||22 λ 2 m | | w | | 2 2 ,其中, ||w||22=∑nxj=1w2j=wTw | | w | | 2 2 = ∑ j = 1 n x w j 2 = w T w
L1 L 1 正则化: λ2m||w||1=λ2m∑nxj=1|wj| λ 2 m | | w | | 1 = λ 2 m ∑ j = 1 n x | w j | ; L1 L 1 正则化之后的 w w 是稀疏的。
神经网络:
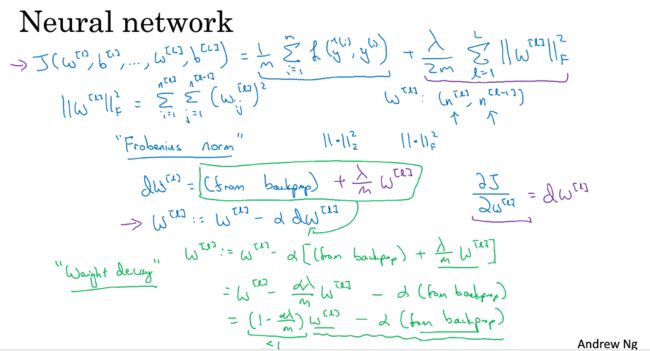
J(w[1],b[1],w[2],b[2],...,w[L],b[L])=1m∑mi=1L(y^(i),y(i))+λ2m∑Ll=1||w[l]||2F J ( w [ 1 ] , b [ 1 ] , w [ 2 ] , b [ 2 ] , . . . , w [ L ] , b [ L ] ) = 1 m ∑ i = 1 m L ( y ^ ( i ) , y ( i ) ) + λ 2 m ∑ l = 1 L | | w [ l ] | | F 2
L2 L 2 正则化: λ2m∑Ll=1||w[l]||2F λ 2 m ∑ l = 1 L | | w [ l ] | | F 2 ,其中, ||w||2F=∑n[l]i=1∑n[l−1]j=1w2ij | | w | | F 2 = ∑ i = 1 n [ l ] ∑ j = 1 n [ l − 1 ] w i j 2
则:
dw[l]=∂J∂w[l]+λmw[l] d w [ l ] = ∂ J ∂ w [ l ] + λ m w [ l ]
那么:
w[l]=w[l]−αdw[l]=w[l]−α(∂J∂w[l]+λmw[l])=(1−αλm)w[l]−α∂J∂w[l] w [ l ] = w [ l ] − α d w [ l ] = w [ l ] − α ( ∂ J ∂ w [ l ] + λ m w [ l ] ) = ( 1 − α λ m ) w [ l ] − α ∂ J ∂ w [ l ]
即正则化与没有正则化相比,就是在 w[l] w [ l ] 更新的时候减去了一个 αλmw[l] α λ m w [ l ] ,也就是为原来 w[l] w [ l ] 的 1−αλm 1 − α λ m 倍。
1.5 为什么正则化可以减少过拟合?
如果将 λ λ 取得非常大,那么很多 w w 接近于0,也就是网络变得更加简单,这样会从高方差(过拟合)导致到高偏差(欠拟合)。
但是 λ λ 适中的时候,我们会减少很多隐藏单元的影响,神经网络变得更简单,不容易发生过拟合。但也不会简化到欠拟合的程度。
直观理解:
如果 w w 在一个很小的区间,那么最后的 z z 也很小,经过激活函数的时候一直在其线性部分,如果整个网络都是这样,那么实际上,这就是个线性分类器。非线性的部分很少。也就是说,如果 w w 的范围小,那么网络去拟合数据集的非线性决策边界的能力就弱,不容易发生过拟合。
1.6 Dropout 正则化
dropout是一种正则化方法。
能防止过拟合。
除非算法过拟合,不然不使用dropout。
dropout:以一定概率随机删除网络中的神经单元。让每次训练的网络都不同。防止过拟合的问题。
dropout有很多种。
inverted dropout (反向随机失活):
训练阶段:
以神经网络的第三层为例: l=3 l = 3
keep_prob = 0.8 # 保留80%的节点,删除20%的节点。
d3 = np.random.rand(a3.shape[0], a3.shape[1]) < keep_prob # d3,第三层的dropout矩阵,a3,第三层的输出。
a3 = np.mutiply(a3, b3) # a3 *= b3,点乘
a3 /= keep_prob # 保持a3的期望和与dropout之前相比,不发生变化a3 /= keep_prob这一步,保持了a3的期望不变,所以和不除相比,在测试阶段变得更容易,因为平均值不会发生太大变化。
inverted dropout 最常用。
测试阶段:
测试阶段不使用dropout,所以在训练阶段除以keep_prob的意义就在于此。即让训练阶段和测试阶段的激活函数的预期结果不要发生太大变化。
1.7 理解 Dropout
对下一层的神经单元来说,上一次神经单元就是这个神经单元的输入。
因为神经单元的输入随时有可能被删除,所以该神经单元不能依赖于某一个特定的单一特征,必须将权重在所有特征上分配,也就是传播权重。
dropout的效果就是:收缩权重的平方范数。即:压缩权重。正则化,防止过拟合。
功能上类似L2正则化,不同之处是应用的方式不同,dropout也会有相应变化。更适用于不同的输入范围。
keep_prob=1,即没有dropout正则化;- 对输入层,即输入特征,一般不使用dropout,即
keep_prob=1,即使使用,keep_prob的值也接近1; - 不同层的
keep_prob可以不同:
- 对比其他层更容易发生过拟合的层,
keep_prob可以设置的小一些; - 对不太可能出现过拟合或者程度小的层,
keep_prob可以设置的大一些,甚至是1;
- 对比其他层更容易发生过拟合的层,
- 将不同层的dropout的
keep_prob设置成不一样的,这样做的缺点是:为了使用交叉验证,必须寻找更多的超参数。 - 另一种方案是:
仅对一部分层设置dropout,其他层不设置,且这些设置dropout的层用同一个keep_prob值。
dropout的缺点:
代价函数J没有办法去明确定义。因此,我们失去了调试工具,没有办法绘制梯度下降迭代的J的下降曲线。
- 解决办法:
先将keep_prob=1,即关闭dropout,待模型的代价函数的曲线下降后,再打开dropout。
1.8 其他正则化方法
- 数据增强
比如讲图像数据集的训练集数据图像都水平翻转一次。
因为数据有冗余,所以没有加入新的数据集那么好,但比起新加数据集,节省了很多成本和时间。
对图像:随机翻转、裁剪等手段增大数据集。
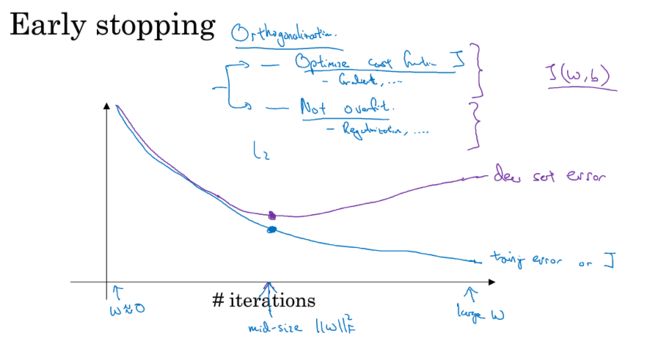
对字符:随意旋转、扭曲字符。 - 早停法
- 优点:耗费时间少
- 缺点:验证集J和训练集J的差距比较小的地方,偏差有可能很大。早停法一种方法必须兼顾两种问题,没有办法分开解决。
- 如果不用早停法解决问题,那么使用L2正则化,则神经网络的训练时间就长。同时需要花时间去选择正则化参数 λ λ 的值。
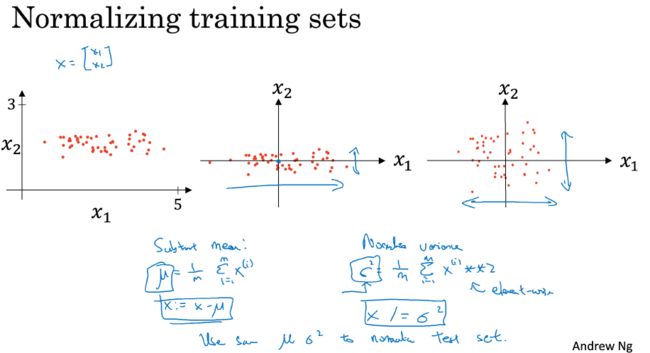
1.9 归一化输入
Normalizing inputs
训练集数据算出 μ μ 和 σ2 σ 2 ;
用 μ μ 和 σ2 σ 2 对整个数据集(训练集、验证集、测试集)进行归一化;
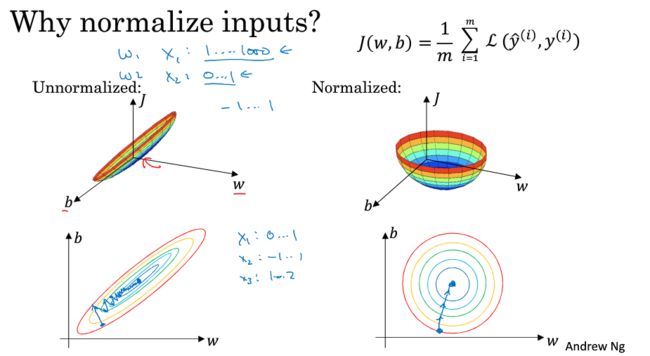
- 为什么要归一化?
如果不归一化,代价函数有可能就是一个非常细长狭窄的函数。归一化后的代价函数图像个更加对称。
对前者,梯度下降不得不用更小的学习速率。
对后者,梯度下降能更直接的找到最小值。可以使用较大的步长。
1.10 梯度消失与梯度爆炸
- 参考资料:
详解机器学习中的梯度消失、爆炸原因及其解决方法
梯度消失和梯度爆炸在本质上是一种情况。
梯度消失经常出现在深层网络和采用了不合理的损失函数之时,如sigmoid;
梯度爆炸经常出现在深层网络和权重初始化值太大之时。
- 深层网络角度:
BP过程中,由链式法则,对激活函数的导数大于1,不断的相乘,最终导致梯度爆炸;
对激活函数的导数小于1,不断的相乘,最终导致梯度消失;
梯度爆炸和消失的根本原因就是反向传播算法的先天不足导致的。 激活函数角度
sigmoid函数的导数最大不超过0.25,选择这样的激活函数很容易导致梯度消失;
tanh比sigmoid略佳,但导数仍然小于1;解决办法:
- 预训练+微调:
- 单独训练每一隐层,微调后,再BP,很少使用;
- 梯度裁剪:
- 主要针对梯度爆炸 ,设置梯度阈值,把超过阈值的梯度强制限制在范围内;
- 权重正则化:
- 可以减少梯度爆炸的概率;
- 激活函数:
- relu,在>0的部分导数恒为1;解决梯度消失和梯度爆炸的问题;
优点:
解决梯度爆炸、梯度消失;
计算方便、速度快;
加速网络的训练。
缺点:
输出不是以0为中心的;
负数部分导数恒为0,会导致一些神经元无法激活。 - leaky relu:
包含relu的优点;
解决relu的缺点; - elu:
比leaky relu计算耗时
- relu,在>0的部分导数恒为1;解决梯度消失和梯度爆炸的问题;
- BN:bacth normalization, 批规范化
- 残差结构
- LSTM
- 预训练+微调:
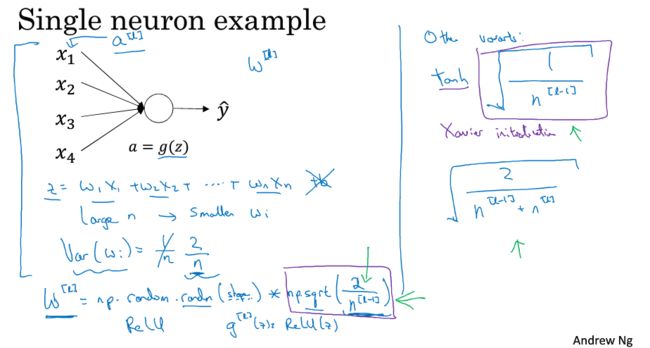
1.11 神经网络的权重初始化
权重初始化是对一开始的 w w 进行初始化的技巧,可以减缓梯度消失和梯度爆炸。属于加快训练速度的技巧之一。
思想是,神经元的输入越多,所有的随机化的 wi w i 乘以 xi x i 的之和就越大。为了不变大,将 w w 的方差减小。即 w w 的方差为 1/n 1 / n
权重初始化,即对随机生成的 w w 的方差进行初始化。
W_l=np.random.randn((l_n, L_n_1))*np.sqrt(1/n)
在实际操作过程中,针对不同的激活函数, w w 有不同的方差。
- relu:
2n[n−1] 2 n [ n − 1 ]
w[l]=np.random.randn(shape)∗np.sqrt(2n[n−1]) w [ l ] = n p . r a n d o m . r a n d n ( s h a p e ) ∗ n p . s q r t ( 2 n [ n − 1 ] )
- tanh:
1n[n−1] 1 n [ n − 1 ] 或者 2n[n−1]+ n[n] 2 n [ n − 1 ] + n [ n ]
w[l]=np.random.randn(shape)∗np.sqrt(1n[n−1]) w [ l ] = n p . r a n d o m . r a n d n ( s h a p e ) ∗ n p . s q r t ( 1 n [ n − 1 ] )
w[l]=np.random.randn(shape)∗np.sqrt(2n[n−1]+ n[n]) w [ l ] = n p . r a n d o m . r a n d n ( s h a p e ) ∗ n p . s q r t ( 2 n [ n − 1 ] + n [ n ] )
以上就是初始化权重矩阵 w w 的方差的默认值。
在这些默认的方差效果不理想的情况下,可以调整方差的分子(算是一个超参数)——方差参数。在神经网络的众多超参数中,调整该参数的优先级很低。
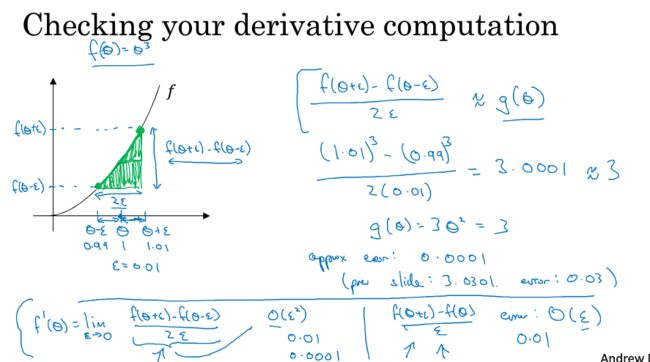
1.12 梯度的数值逼近
双边误差比单边误差精确度更高,梯度的数值逼近一般用双边误差。
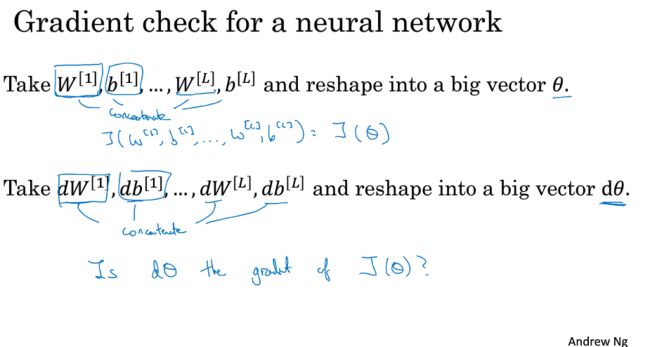
1.13 梯度检验
gradient checking
grad check
用梯度检验检查一个神经网络反向传播的正确与否。
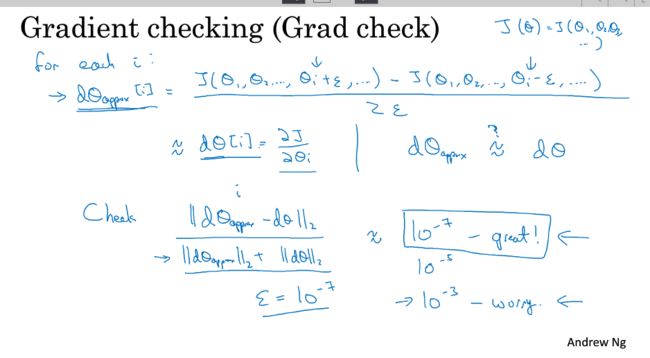
dΘ[i]approx=J(…,θi+ϵ,…)−J(…,θi−ϵ,…)2ϵ d Θ a p p r o x [ i ] = J ( … , θ i + ϵ , … ) − J ( … , θ i − ϵ , … ) 2 ϵ
||dΘapprox−dΘ||2||dΘapprox||2+||dΘ||2 | | d Θ a p p r o x − d Θ | | 2 | | d Θ a p p r o x | | 2 + | | d Θ | | 2
取 ϵ=10−7 ϵ = 10 − 7
如果结果约等于 10−7 10 − 7 ,那么认为梯度没有问题。
如果大于了,可能就有bug。
1.14 关于梯度检验实现过程中的注意事项
- 不能在训练时使用梯度检验,——仅用于dubug;
- 如果梯度检验结果很大,检查每一项去找到bug;
- 不要忘记正则化部分,也是 \theata \theata 的一部分;
- 不要在dropout的网络上使用梯度检验,因为dropout很难计算代价函数 J J ,没办法去使用梯度检验。也就是,将dropout的
keep_prob = 1,再进行梯度检验。 - (很少用)在一开始初始化网络参数后,即进行一次梯度检验;在网络训练一段时间后,再进行一次梯度检验。因为一开始 w w 和 b b 比较小,梯度下降是正确的,随着 w w 和 b b 越来越大,梯度下降有可能出错。
第二周 优化算法
优化算法帮助你快速训练模型。
2.1 Mini-batch 梯度下降法
数据集分成若干个小的子集,每个子集叫一个mini-batch。每次训练神经网络,只用一个mini-batch,可以加快网络的训练速度。
x(i) x ( i ) ,第 i i 个样本;
z[i] z [ i ] ,第 i i 层神经网络;
X{i}, X { i } , 第 i i 个mini-batch,每一个mini-batch都有很多个样本;
必然要引入for循环,为了训练完所有的mini-batch。
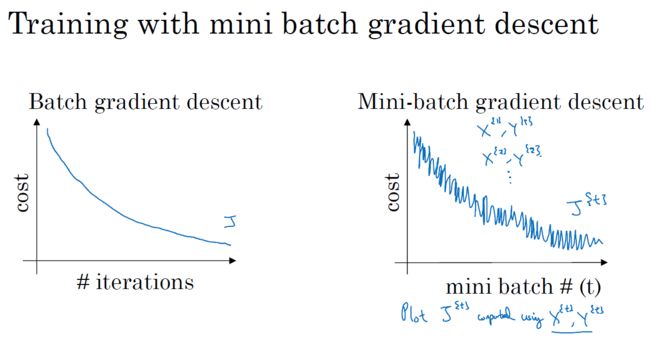
1 epoch:遍历了一遍训练集。- 如果采用梯度下降(又叫batch gradient descent),
1 epoch只有一次梯度下降。 - 如果采用Mini-batch 梯度下降法,
1 epoch有5000次梯度下降(每个mini batch有1000个数据,整个训练集有500 0000个数据)。 - 一般的,需要多次遍历训练集。直到收敛到合适的精度。
- mini-batch 梯度下降 比 batch 梯度下降 快。
2.2 理解 mini-batch 梯度下降法
与batch gradient descent相比,mini-batch gradient descent的学习曲线没有那么平滑,有很多噪声,但总体趋势应该也是不断降低向下。
选择mini-batch size:
- 如果
mini-batch size=m:batch gradient descent——批梯度下降 (X{1},Y{1})=(X,Y) ( X { 1 } , Y { 1 } ) = ( X , Y ) ,单次迭代耗时太长。 - 如果
mini-batch size=1:stochastic gradient descent——随机梯度下降,每一个样本就是一个mini-batch。 (X{i},Y{i})=(x(i),y(i)) ( X { i } , Y { i } ) = ( x ( i ) , y ( i ) ) ,失去向量化带来的加速作用,效率低。 1 << mini-batch size << m,mini batch gradient descent——mini-batch 梯度下降,介于梯度下降和随机梯度下降之间。mini-batch size not too big, not too small——>学习速率最快。
- 首先,大量的向量化数据;
- 其次,不用等整个数据集都计算后再梯度下降,单次迭代耗时短。
batch梯度下降:
- 相对噪声低;
- 幅度大( α α );
- 训练下降方向指向最小值方向;
- 最终能收敛到最小值。
随机梯度下降:
- 噪声比较大;
- 为了抑制噪声,学习速率 α α 要设置的小一些;
- 每次训练的下降方向不一定是指向最小值的方向;
- 永远无法收敛,但是会在最小值附近波动;
mini-batch 梯度下降:
- 每次下降方向不总是指向最小值方向,但比随机梯度下降要更持续地靠近最小值的方向;
- 不一定收敛,有可能在最小值的附近很小的范围内波动;
- 如果在最小值附近波动,可以慢慢减小学习率 α α 。
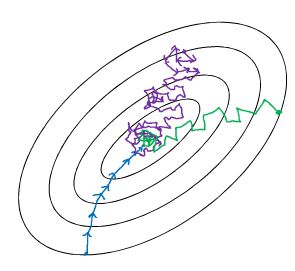
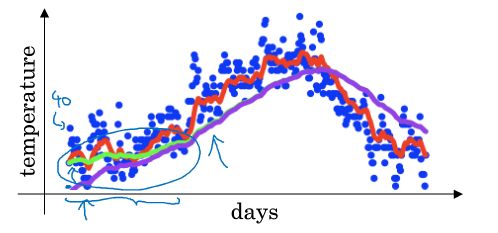
蓝色为batch梯度下降;
紫色为随机梯度下降;
绿色为mini batch梯度下降。
选择mini batch size 的指导原则
- 如果训练集小(m <= 2000):用batch梯度下降;
- 其他选择mini batch梯度下降;
- 典型的mini batch size(64-512之间):64、128、256、512(选择2的次幂,代码会运行的快一些);
- 确保mini batch符合CPU/GPU的内存;
- 需要对mini batch size选择一些不同的值来挑选使得模型的代价函数下降最快的一个。
2.3 指数加权平均
接下来几节学习比梯度下降快的优化算法。
在学习这些算法前,必须学会指数加权平均(统计学叫指数加权移动平均)。
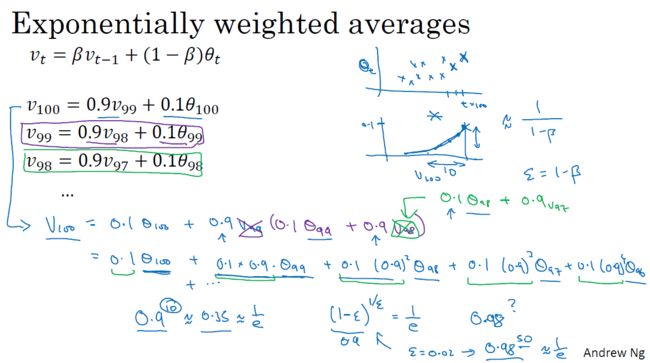
- 指数加权平均:
V0=0 V 0 = 0
Vt=βVt−1+(1−β)θt V t = β V t − 1 + ( 1 − β ) θ t
其中, Vt V t 近似为 11−β 1 1 − β 天的数据平均值; 0<=β<=1 0 <= β <= 1 ;
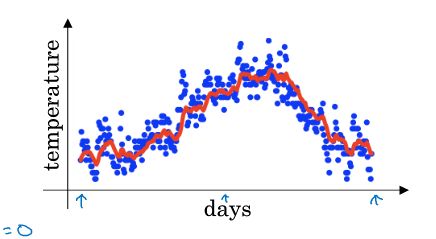
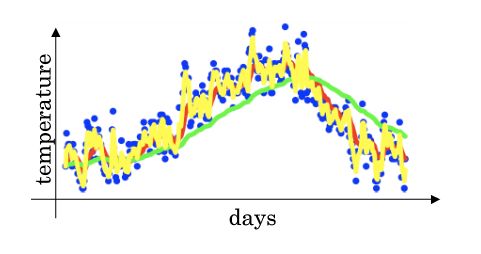
β β 越大,曲线越平滑,但曲线会进一步右移;
β β 越小,曲线波动越大,更有可能出现异常值,但能更好的适应数据的变化趋势 。
指数加权平均可以理解为:由过去几天的数据在今天的平均值构成的曲线。
2.4 理解指数加权平均
向量化 Vθ V θ 的计算,基本上只占一行代码。
Vθ=0 V θ = 0
repeat:{ r e p e a t : {
get next θt g e t n e x t θ t
Vθ=βVθ+(1−β)θt V θ = β V θ + ( 1 − β ) θ t
} }
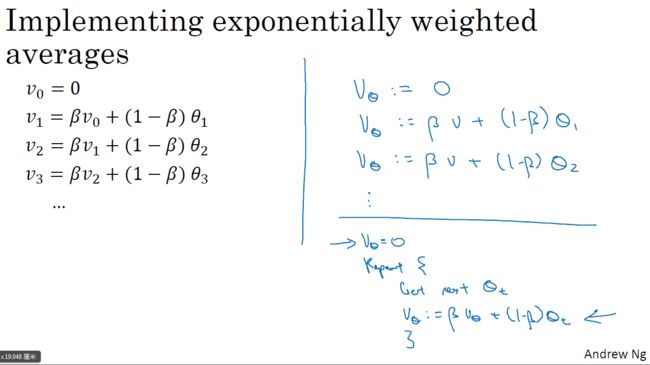
优点:
- 代码量少;占用极小内存;运算量小;结果虽不精确但也不赖。
- 不是最好的计算平均数的方法,也不是最精确的。 但如果使用一个窗去计算10天的平均数,会有很多行代码,执行更加复杂,计算成本更加高昂。
2.5 指数加权平均的偏差修正
如果没有偏差修正,曲线的最左侧很小,无法反应真实情况。
那么添加偏差修正会改善这种情况。
即: Vθ=βVθ+(1−β)θt1−βt V θ = β V θ + ( 1 − β ) θ t 1 − β t
分开写:
Vθ=0 V θ = 0
repeat:{ r e p e a t : {
get next θt g e t n e x t θ t
Vθ=βVθ+(1−β)θt V θ = β V θ + ( 1 − β ) θ t
Vθ=Vθ/(1−βt) V θ = V θ / ( 1 − β t )
} }
对结果除以 1−βt 1 − β t ,效果是能够消除一开始的偏差,而对后期没有影响。
大部分人不愿意使用偏差修正,而是熬过初始时期。
如果你关心初始时期的偏差, 偏差修正能够帮助你在模型训练的早期获得更好的估计。
紫色为没有偏差修正,绿色为偏差修正后。
2.6 动量梯度下降法Gradient descent with momentum
训练速度比标准的梯度下降法要快。
- 基本思想:
计算梯度的指数加权平均数,作为新的梯度,来训练网络。
标准梯度下降的缺点:
标准梯度下降(包括batch梯度下降、mini batch梯度下降、随机梯度下降),下降过程中存在波动。导致:1,训练模型耗时;2,无法使用过大的学习率 α α 。为了避免摆动过大,需要使用较小的 α α 。
在纵轴上,希望学习的慢一点;在横轴上,希望学习快。

momentum 梯度下降:
Vdw=0、Vdb=0 V d w = 0 、 V d b = 0
On iteration t: O n i t e r a t i o n t :
compute dw、db on current mini-batch compute dw、db on current mini-batch
Vdw=βVdw+(1−β)dw V d w = β V d w + ( 1 − β ) d w
Vdb=βVdb+(1−β)db V d b = β V d b + ( 1 − β ) d b
w=w−αVdw w = w − α V d w
b=b−αVdb b = b − α V d b
两个超参数:
- α α 学习速率;
- β β 控制着指数加权移动平均数,一般为 β=0.9 β = 0.9 (具有鲁棒性);
一般不会添加偏差修正;
在竖直方向上,计算指数加权移动平均值,正负相抵,减少纵轴方向上的波动;
在水平方向上,所有的微分都是指向最小值方向的,所以指数加权移动平均值的影响不大;
所以,纵轴方向波动减小,横轴方向运动更快。
即,在抵达最小值的路上减少了摆动。

想象一个碗装的函数,开口朝上。一个点位于碗的上沿。momentum梯度下降就相当于给下降的小球一个加速度。因为 β β 比1小一些,类似于摩擦力,所以速度不会无限制的增大下去。
在 Vdw=βVdw+(1−β)dw V d w = β V d w + ( 1 − β ) d w 中, Vdw V d w 就是前一刻的速度, dw d w 就是加速度。小球具有的动量会越来越大。
与梯度下降每次迭代都是独立的不同,模型可以从momentum梯度下降中获得一个越来越大的动量。而这个动量是跟以前的若干次梯度下降有关系的。
图像来自深度学习优化函数详解(4)– momentum 动量法
momentum GD可以想象成小球从坡上往下滚。小球的动量越来越大,过最低点后仍然会往前冲,如果冲到了另一个下坡。,有可能到一个更低点(更好的局部极小值)。如果动量没那么大,会慢慢的慢下来,再次返回到第一个低点。
2.7 RMSprop
- RMSprop:root mean square propagation,方均根传播
- 作用:加速梯度下降
- 简化的算法说明:
On iteration t: On iteration t:
compute dw, db on current mini-batch compute dw, db on current mini-batch
Sdw=β2Sdw+(1−β2)(dw)2 S d w = β 2 S d w + ( 1 − β 2 ) ( d w ) 2
Sdb=β2Sdb+(1−β2)(db)2 S d b = β 2 S d b + ( 1 − β 2 ) ( d b ) 2
w=w−αdwSdw√ w = w − α d w S d w
b=b−αdbSdb√ b = b − α d b S d b
- 现在假设b的方向为纵向,w的方向为横向,那么蓝色线为梯度下降的路线。
而RMSprop因为 S S 的存在:
一开始前进方向的 dw d w 小,垂直方向的 db d b 大,梯度小反而由于 Sdw−−−√ S d w 做分母,导致 w w 变化大, b b 变化小,所以将垂直方向压缩,水平方向拉伸,导致波动减小,这样加快训练速度。
同时,由于波动减小(不容易发生学习速率过大时导致不收敛或发散的问题),我们可以设置更大的学习速率 α α 。 - 实际上前进方向和垂直于前进方向的方向(纵轴方向)上的参数不一定就是 w w 、 b b 。有可能是如图:
-
纵轴为 w1、w3、w7 w 1 、 w 3 、 w 7 、横轴为 w2、w4....... w 2 、 w 4 . . . . . . .
-
- 为什么叫做RMSprop?
- Sdw=β2Sdw+(1−β2)(dw)2 S d w = β 2 S d w + ( 1 − β 2 ) ( d w ) 2 的 (dw)2 ( d w ) 2 是平方和;
- w=w−αdwSdw√ w = w − α d w S d w 的 Sdw−−−√ S d w 是平方根;
- 超参数叫做 β2 β 2 是为了和momentum算法的超参数 β β 区分开来,因为有两个算法的结合算法;
- 为防止 Sdw−−−√ S d w 出现的接近于
0的情况(导致参数变动很大),一般在 w=w−αdwSdw√ w = w − α d w S d w 添加一个很小的数字 ϵ ϵ ( ϵ=10−8 ϵ = 10 − 8 ),防止这种情况的发生,即:
w=w−αdwSdw−−−√+ϵ w = w − α d w S d w + ϵ
2.8 Adam 优化算法
- Adam:Adaptive Moment Estimation(自适应矩估计)
- 将momentum和RMSprop结合起来,得到速度更快的优化算法:Adam优化算法;
- 算法伪代码:
Vdw、Vdb、Sdw、Sdb=0 V d w 、 V d b 、 S d w 、 S d b = 0
On iteration t: On iteration t:
Vdw=β1Vdw+(1−β1)dw、 Vdb=β1Vdb+(1−β1)db <−−−(momentum) V d w = β 1 V d w + ( 1 − β 1 ) d w 、 V d b = β 1 V d b + ( 1 − β 1 ) d b < − − − ( m o m e n t u m )
Sdw=β2Sdw+(1−β2)(dw)2、Sdw=β2Sdw+(1−β2)(dw)2 <−−−(RMSprop) S d w = β 2 S d w + ( 1 − β 2 ) ( d w ) 2 、 S d w = β 2 S d w + ( 1 − β 2 ) ( d w ) 2 < − − − ( R M S p r o p )
Vcorrecteddw=Vdw / (1−βt1)、Vcorrecteddb=Vdb / (1−βt1) V d w c o r r e c t e d = V d w / ( 1 − β 1 t ) 、 V d b c o r r e c t e d = V d b / ( 1 − β 1 t )
Scorrecteddw=Sdw / (1−βt2)、Scorrecteddb=Sdb / (1−βt2) S d w c o r r e c t e d = S d w / ( 1 − β 2 t ) 、 S d b c o r r e c t e d = S d b / ( 1 − β 2 t )
w=w−α(VcorrecteddwScorrecteddw√+ϵ) w = w − α ( V d w c o r r e c t e d S d w c o r r e c t e d + ϵ )
b=b−α(VcorrecteddbScorrecteddb√+ϵ) b = b − α ( V d b c o r r e c t e d S d b c o r r e c t e d + ϵ ) - 超参数:
- α α :学习速率
- 调试,找到较好的值;
- β1 β 1 : dw d w 的移动加权平均值
0.9(一般情况下);
- β2 β 2 : dw2 d w 2 的移动加权平均值
0.999(Adam算法作者推荐);
- ϵ ϵ :不太重要,不会影响算法的表现
- 10−8 10 − 8 (Adam算法作者推荐);
- 一般情况下,人们使用 β1 β 1 、 β2 β 2 、 ϵ ϵ 的缺省值,不断尝试不同的 α α 值,寻求比较好的结果。
- α α :学习速率
- momentum、RMSprop、Adam是经受住考验的,适用于不同深度学习结构的优化算法;
- Adam:Adaptive Moment Estimation(自适应矩估计)叫自适应矩估计的原因:
- Vdw V d w 是 dw d w ( db d b )的估计,即对梯度的一阶矩估计,叫做第一矩;
- Sdw S d w 是 dw2 d w 2 ( db2 d b 2 )的估计,即对梯度的二阶矩估计,叫做第二矩;
- 第一矩和第二矩根据梯度的变化进行动态调整;
- α α 后边的部分对 α α 形成动态约束,而且有明确的范围;
- 优点:
- 对内存需求小;
- 为不同的参数计算不同的自适应学习率;
- 适用于大多数非凸优化;
- 适用于大数据集和高维空间;
2.9 学习率衰减
为什么要计算学习率衰减?
以固定的学习率 α α 去学习,在mini batch过程中存在噪声,下降的过程如上图所示,不会精确的收敛到最优解,而是在附近大幅度地振荡。
如果学习率会衰减,在学习初期的时候, α α 比较大,学习的速率比较快,随着 α α 的减小,步伐也渐渐变慢变小。最后学习曲线在最小值附近的一小块区域内摆动。
使用学习率衰减的原因是:
学习初期可以承受较大的步伐。
到了收敛的阶段,小的学习率可以让步伐变得小一些。
如何进行学习率衰减?
1 epoch = 1 pass through data,即遍历一遍数据集;
第一次遍历数据集,(将数据集分为若干mini batch),为epoch 1;
第二次,为epoch 2;
那么:
学习率衰减的图像大致如下;
| α0=0.2 α 0 = 0.2 | decay rate = 1 |
|---|---|
| epoch | α α |
| 1 | 0.1 |
| 2 | 0.067 |
| 3 | 0.05 |
| 4 | 0.04 |
| 。。。 | 。。。 |
- 超参数:
- α α
- decay rate d e c a y r a t e
为了达到比较好的效果,必须尝试不同的值,包括: α α 、 decay rate d e c a y r a t e
其他学习率衰减的办法
- 指数衰减:
α=0.95epachNum∗α0 α = 0.95 e p a c h N u m ∗ α 0
其中,0.95指代一个比1小的数字; - 离散下降:
- 其他方法:
其中,k为常数,t为mini batch的次数; - 手动衰减
学习速率衰减可以加快训练的速度;
但在一开始调整模型的超参数的时候,不考虑学习率衰减;
设置一个固定的学习速率,待尝试出一个比较好的模型后,可以用学习速率衰减加快训练。
2.10 局部最优的问题
鞍点
我们提起局部最优,往往想到的是如下图所示:
但梯度为0的点(驻点)不一定是一个局部极小值点,也有可能是鞍点。
往往代价函数梯度为0的点,是鞍点。
尽管梯度为0,但是在一个方向上为极小值点,在另一个方向上为极大值点。
平稳段问题
在碰到鞍点这种情况的时候,鞍点附近为平稳段;
在平稳段,由于梯度接近于0,所以学习的步伐很小;
如图,算法慢慢抵达平稳段的鞍点,然后慢慢走出平稳段,这需要花费很长时间。
在训练较大的神经网络时:
- 不太可能会陷入一个不太好的局部最优解中(因为参数多,被定义在高纬度空间中,那里充满了鞍点);
- 平稳段会使得学习速率变慢(各种优化算法的用武之地,例如Adam,用来加快训练速度,尽快走出平稳段);
第三周 超参数调试、Batch Normalization和程序框架
3.1 超参数调整
超参数重要程度分级
α α 最重要;
其次是黄色部分;
最后是紫色部分;
随机
- 随机尝试超参数,而不是用网格选择超参数;
- 因为并不能提前知道哪一个超参数更重要;比如,选择的两个超参数是 α α 和 ϵ ϵ ,如下图所示,那么网格法在尝试25组数据后,实际上 α α 只尝试了5种数据;而随机选择的话, α α 可以尝试25种数据;所以第二种可能下更有可能找到效果最好的那个。
往往一个模型的超参数不止两个,在多个超参数的情况下,我们事先不知道哪个超参数更重要的时候,使用随机的选择超参数的组合,能够探究更多的重要超参数的潜在值。
- 因为并不能提前知道哪一个超参数更重要;比如,选择的两个超参数是 α α 和 ϵ ϵ ,如下图所示,那么网格法在尝试25组数据后,实际上 α α 只尝试了5种数据;而随机选择的话, α α 可以尝试25种数据;所以第二种可能下更有可能找到效果最好的那个。
- 策略:由粗到细
- 在整个超参数构成的空间随机选取一些点尝试后,发现某些区域能取得更好的成果,那么在该区域进行精细的搜索;
随机取值可以提高对超参数的搜索效率。
3.2 为超参数选择合适的范围
给 α α 取值
使用对数尺度。
在Python中的用法:
也就是,如果 α α 的范围在 10a 10 a 到 10b 10 b 之间,那么,r的范围为[a, b]。
在[a, b]的范围内对r进行随机均匀取值。
即, α α 取值在对数刻度上随机均匀取值;希望能在每十倍程里边探索的 α α 的值一样多。
给 β β 取值(给有指数加权平均值的超参数取值)
1−β=10r 1 − β = 10 r
β=1−10r β = 1 − 10 r
即 β β 在0.9-0.99、0.99-0.999之间探索的值一样多。
- 为什么不用线性轴取值?
当 β β 接近于1时,所得结果的灵敏度会发生变化,即使 β β 有微小的变化。
需要更加密集的在 β β 接近于1的区间内取值。这样才能更有效的分布取样点。
在超参数的选择中,对超参数的标尺做出正确的选择,可以提高效率。
如果标尺总是选择线性标尺,可能就需要取更多的采样点。
3.3 超参数调整的实践:Pandas VS Caviar
随着算法的不断改进、数据的不断变化,运算硬件的升级等,每隔几个月至少一次去重新测试和评估超参数。
超参数调整的两种不同方式(取决于算力大小):
- 照看一个模型(babysitting one model):
- 情景:具有庞大的数据集但算力不够,只可以负担起试验一个模型or一小批模型;
- 做法:随着时间的推移,不断地观察模型的表现,调整其超参数;(之所以这么做,是因为不能在同一时间内试验大量模型)
- 熊猫模式:一胎只生一个,全力照看这一个宝宝。
- 同时训练多个模型(training many models in parallel):
- 情景:算力足够;
- 做法:多个模型同时训练,每个模型的超参数不同,观察其表现,择优录取;
- 鱼子模式:鱼每次产卵一亿个,但不会多照料其中的某一个鱼子,一视同仁。只是希望这一堆鱼子里边,能有一个或者一部分表现出色,变成鱼宝宝。
3.4 batch normalization(归一化网络的激活函数)
优点:
- 使超参数搜索变容易;
- 使NN对超参数的选择更加稳定;
- 超参数的范围更庞大;
- 超参数的效果更好;
- 很容易训练网络甚至是深层网络;
normalizing inputs to speed up learning
对于逻辑回归,归一化输入,可以加速训练 w、b w 、 b 。
X(i) 2 X ( i ) 2 即 X X 中的每一个元素的平方,即点积。
那么,对于深层网络,可不可以归一化每层网络的激活函数的输出值 a[l] a [ l ] ,来加速训练 w[l+1]、b[l+1] w [ l + 1 ] 、 b [ l + 1 ] ?
严格来说,我们归一化的是 z[l] z [ l ] ,而不是 a[l] a [ l ] 。
学术界对归一化 z[l] z [ l ] 还是 a[l] a [ l ] 有争论。
但此处,我们学习归一化 z[l] z [ l ] 。
batch norm就是将归一化过程从输入层推广到了隐藏层。使得隐藏层单元值的均值和方差标准化,或者取得想要的均值和方差。
实现Batch Norm
Given some intermediate values in NN :z[l](1)、...、z[l](m) Given some intermediate values in NN : z [ l ] ( 1 ) 、 . . . 、 z [ l ] ( m )
μ=1m∑iz[l](i) μ = 1 m ∑ i z [ l ] ( i )
σ2=1m∑i(z[l](i)−μ)2 σ 2 = 1 m ∑ i ( z [ l ] ( i ) − μ ) 2
z[l](i)norm=z[l](1)−μσ2+ϵ√ z n o r m [ l ] ( i ) = z [ l ] ( 1 ) − μ σ 2 + ϵ
z˜[l](i)=γz[l](i)norm+β z ~ [ l ] ( i ) = γ z n o r m [ l ] ( i ) + β
usez˜[l](i) instend of z[l](i) use z ~ [ l ] ( i ) instend of z [ l ] ( i )
其中, γ、β γ 、 β 为模型的learnable parameters。
参数 γ、β γ 、 β 的意义在于,给出任意均值和方差的 z z 。
比如,如果隐藏层使用的是sigmoid激活函数,那么,我们需要的输入可能就不是均值为0,方差为1的输入数据。
- β β 不是momentum、adam、rms prop算法中的超参数,此处仅为BN的参数。
3.5 将 Batch Norm加入到神经网络
BN加入到神经网络
在反向传播更新 β、γ β 、 γ 的时候,可以使用梯度下降,也可以使用其他优化算法。
在深度学习框架中,不用自己去实现BN。已经有了现成的框架可以实现。
比如在tensorflow中,使用:tf.nn.batch_normalization()
虽然不用实现细节,但是必须了解原理。
BN working with mini-batches
实践中,BN往往和训练集的mini-batch一起使用。
- 第一批数据进入NN;
- 反向传播,更新网络参数 w[l]、β[l]、γ[l] w [ l ] 、 β [ l ] 、 γ [ l ] (没有 b[l] b [ l ] );
- 第二批数据进入NN(使用上次的NN参数);
- 反向传播,更新网络参数 w[l]、β[l]、γ[l] w [ l ] 、 β [ l ] 、 γ [ l ] (没有 b[l] b [ l ] );
- 第三批数据进入NN(使用上次的NN参数);
直到收敛。
网络的参数为: w[l]、β[l]、γ[l] w [ l ] 、 β [ l ] 、 γ [ l ] 。
为什么没有 b[l] b [ l ] ?
因为BN的过程,先是把数据的均值转换成0。再利用训练出来的参数 β β 给数据新的均值。那么,原始数据的参数 b[l] b [ l ] 不管如何取值,都会在均值转换成0这一步消掉。也就是,有没有 b[l] b [ l ] ,都不会影响到最后的 Z~[i] Z ~ [ i ] 。
如果输入数据 X{t} X { t } (第t批数据)为
(n,m),那么,- Z[1] Z [ 1 ] 为 (n[1]、m) ( n [ 1 ] 、 m ) —–> Z[l] Z [ l ] 为 (n[l]、m) ( n [ l ] 、 m ) ;
- w[l] w [ l ] 为 (n[l]、n[l−1]) ( n [ l ] 、 n [ l − 1 ] ) ;
- β[l] β [ l ] 和 γ[l] γ [ l ] 为 (n[l]、1) ( n [ l ] 、 1 ) (Python的广播机制);
图中 Z[l] Z [ l ] 为 (n[l]、1) ( n [ l ] 、 1 ) 的原因是输入的数据个数为1。
实现带BN的梯度下降:
for t = 1 ...... num of mini_batches: for t = 1 ...... num of mini_batches :
compute forward prop on X{t}: compute forward prop on X { t } :
in each hidden layer, use BN to replace Z[l] with Z~[l]; in each hidden layer, use BN to replace Z [ l ] w i t h Z ~ [ l ] ;
use back prop to compute dw[l]、dβ[l]、dγ[l]; use back prop to compute d w [ l ] 、 d β [ l ] 、 d γ [ l ] ;
update parameters w[l]=w[l]−αdw[l]、β[l]=β[l]−αdβ[l]、γ[l]=γ[l]−αdγ[l]; update parameters w [ l ] = w [ l ] − α d w [ l ] 、 β [ l ] = β [ l ] − α d β [ l ] 、 γ [ l ] = γ [ l ] − α d γ [ l ] ;
- 参数更新这一步,可以使用各种优化算法。
3.6 Batch Norm 为什么奏效?
感性的理解,貌似BN是将输入数据归一化这一技巧用到了所有的隐藏层,而输入数据归一化的好处就是能加速网络的训练,但是其实,BN之所以有效,还有更深层次的原因:
- 1.数据归一化的好处;
- 代价函数变得更加圆,梯度下降的波动减小,加速训练;
- 波动减小,可以选择更大的学习速率 α α ;
- 2.减弱covariate shift 问题;
- 3.轻微的正则化效果;
covariate shift 问题:
对这个逻辑回归模型
用一个数据集训练网络来找猫。训练集正例的猫都是黑色的。而真正的数据集的正例是各种颜色的猫。
即训练集和验证集(以及测试集)的数据分布不一样。
那么,在左边训练的很好的模型,不能期待它同样在右边也运行的很好。即使真的存在在左右两侧都运行的很好的一个函数。
但你不能期望自己有这么好的运气。
这种问题,就叫做covariate shift 。
- covariate shift 问题 :
- 在这个单层的网络或者逻辑回归模型中,训练集和验证集(以及测试集)的数据分布不一致。在训练集上训练出来的模型无法在验证集(以及测试集)上取得良好的效果。我们把训练集和验证集(以及测试集)的数据样本分布不一致的问题叫做covariate shift (协方差漂移)[非正确概念]
- 在这个单层的网络或者逻辑回归模型中,训练集和验证集(以及测试集)的数据分布不一致。在训练集上训练出来的模型无法在验证集(以及测试集)上取得良好的效果。我们把训练集和验证集(以及测试集)的数据样本分布不一致的问题叫做covariate shift (协方差漂移)[非正确概念]
上边这个概念其实是有些错误的,再加以延伸:
上图有一个深层的网络,如果我们单看中间的第三层,在该层之前的前一层的输出 a[2]1 a 1 [ 2 ] 、…、 a[2]4 a 4 [ 2 ] 作为它的输入。
那么,蓝色部分的参数 w[l] w [ l ] 、 b[l] b [ l ] 由于参数更新而发生了变化,在发生变化后的网络中输入数据,最后得到的新的 a[2]1 a 1 [ 2 ] 、…、 a[2]4 a 4 [ 2 ] 可能和参数更新前的分布不一致。
或者说,在参数 w[l] w [ l ] 、 b[l] b [ l ] 更新前后,算出来的 a[2]1 a 1 [ 2 ] 、…、 a[2]4 a 4 [ 2 ] 的分布可能不一致(方差不同,均值不同)。
不同分布的 a[2]1 a 1 [ 2 ] 、…、 a[2]4 a 4 [ 2 ] 在输入后半部分以后,必然引起不同的结果。
这就是covariate shift 问题。
- 为什么covariate shift 问题对神经网络来说是个问题?
- 对每一层而言,参数更新后,该层的输入分布就有可能发生变化。层层叠加后,输入分布变化的非常大,后边的隐层需要不断地去重新适应这些变化。神经网络没有一个坚实的基础来训练数据。训练一个网络的难度大。
减弱covariate shift
- 也就是说,由于BN的存在,从某一个隐层看过来,前边的神经网络部分给该隐层的输入虽然会不断的发生变化(因为前边的神经网络的参数在不断的更新),但是,对该隐层而言,输入值的分布(均值、方差)保持不变。这个均值和方差要么是0和1,要么是由 γ γ 和 β β 决定。
- BN限制了前层参数更新对数值分布影响的程度。
- BN减少了输入值(对每一层而言)分布改变的问题。使得这些值变得稳定。即使这些值的分布发生变化,也是较小的变化。
- BN减弱了前层参数和后层参数的作用之间的联系。使得每一层都可以自己学习,稍稍独立于其他层。有助于加速整个网络的学习。
BN的轻微正则化
每一次计算均值和方差都是在一个mini batch上进行,而不是整个数据集。这样计算出来的 z~[l] z ~ [ l ] 会有噪声。所以,会对每一个隐藏层的激活函数添加噪声进去。这迫使后层的单元不过分依赖任何一个隐藏单元。类似于dropout,这种由在mini batch上计算均值和误差的方式会加入噪声,从而达到轻微的正则化效果。
算是BN的一个副作用。有时候,会期望这种副作用,有时候又要避免。
这种轻微正则化会随着mini batch的size的增大而减小。比如,mini batch为128的数据集,就比为512的数据集的正则化作用明显。
在训练集上,BN一次只能处理一个mini batch的数据。在一个mini batch上计算均值和方差。
而验证集和测试集不会去分mini batch。这时候BN怎么work呢?
3.7 测试时的 Batch Norm
测试的时候,没有mini batch,而测试集数据又是一个一个喂给模型的,没有 μ μ 和 σ2 σ 2 ,这个时候, μ μ 和 σ2 σ 2 从哪里来?
容易想到的是,用整个训练集数据去计算一个 μ μ 和 σ2 σ 2 ;
但更好的办法是,使用训练集数据在mini batch过程中计算出来的 μ μ 和 σ2 σ 2 的移动加权平均值。
3.8 Softmax 回归
关键词:softmax层,softmax激活函数
从二分类到多分类,从logistic回归推广到softmax回归。
注意:
- 如果是只有输入层到输出层,没有隐藏层,那么这是softmax回归。
- 如果是在一个具有隐藏层的神经网络最后加入了一层,该层使用softmax激活函数,那么这是给神经网络加入softmax层。
现在是一个四分类的问题,输出层为4个值,要将其变成概率。
加入一个Softmax层,其激活函数为 a[L]=g[L](Z[L]) a [ L ] = g [ L ] ( Z [ L ] ) :
- t=e(Z[L]) t = e ( Z [ L ] )
- a[L]=t∑4jtj a [ L ] = t ∑ j 4 t j ,那么, a[L]i=ti∑4jtj a i [ L ] = t i ∑ j 4 t j
或者写成:
a[L]=e(Z[L])∑4je(Z[L])j a [ L ] = e ( Z [ L ] ) ∑ j 4 e ( Z [ L ] ) j
softmax激活函数和其他激活函数不同,
- 其他激活函数的输入输出都是数值,softmax激活函数输入输出都是向量。
上图是使用没有隐藏层的一个神经网络,即输入层,输出层,然后经过softmax层。就是logistic回归的一般形式。因为没有引入隐藏层,整个决策边界都是线性决策边界。
以上为给一个多分类的神经网络加入softmax层,让其输出变成概率值。
在没有加入隐藏层的情况下,有logistics回归以及其升级版的softmax回归。
学习吴恩达ufldl的softmax回归
3.9 训练一个 Softmax 分类器
hard vs soft
softmax是相对于hardmax的一个说法;
对一个向量:
所谓hardmax:
即在对应原向量最大元素的位置上放置1,其他位置为0;
所谓softmax:
成了概率值,这四个元素之和为1;
最大概率值对应的就是原始向量的最大值;
相对于hard max,soft max所做的从向量 z z 到最终概率的映射更为温和;
理解softmax回归
softmax回归是将logistics回归从二分类问题推广到了多分类问题:
- 如果使用softmax来解决二分类问题,那么这就等同于一个logistics回归模型;而且是一个冗余的logistics回归模型;其代价函数、假设函数都一致。但此时,logistics regression的输出层只需要一个单元,而softmax需要两个单元。产生了冗余。
多个类别的分类问题;
- 如果这些类别之间互斥,用softmax regression;
- 如果类别之间不是互斥的,用多个logistics regression;
损失函数loss function
也就是,要让损失函数 L(y^,y) L ( y ^ , y ) 最小,在上图中,就必须让正确的标签值 y2 y 2 所对应的预测概率 y^2 y ^ 2 尽可能的大。