串口驱动
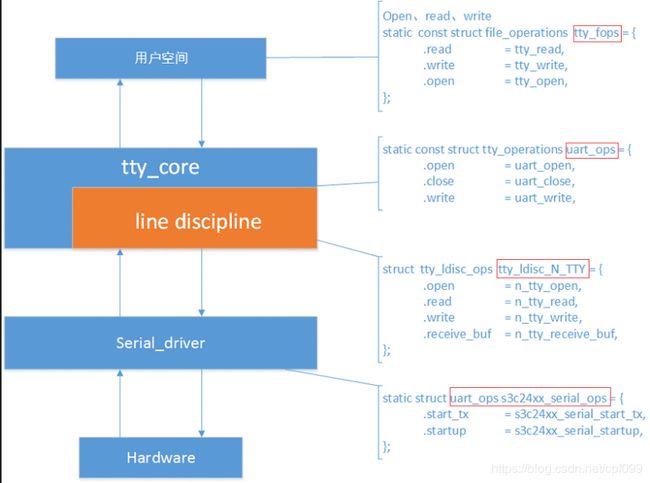
uart串口的整个框架如图
初始化
driver/tty/serial/omap-serial.c
static int __init serial_omap_init(void)
{
int ret;
ret = uart_register_driver(&serial_omap_reg);
if (ret != 0)
return ret;
ret = platform_driver_register(&serial_omap_driver);
if (ret != 0)
uart_unregister_driver(&serial_omap_reg);
return ret;
}
uart_register_driver函数将struct uart_driver结构体传入
#define OMAP_SERIAL_NAME "ttyO"
#define OMAP_MAX_HSUART_PORTS 6
#define OMAP_CONSOLE (&serial_omap_console)
#else
#define OMAP_CONSOLE NULL
static struct uart_driver serial_omap_reg = {
.owner = THIS_MODULE,
.driver_name = "OMAP-SERIAL",
.dev_name = OMAP_SERIAL_NAME,
.nr = OMAP_MAX_HSUART_PORTS,
.cons = OMAP_CONSOLE,
};
在这个结构体中初始化了设备的名称及设备号
driver/tty/serial/serial_core.c
int uart_register_driver(struct uart_driver *drv)
{
struct tty_driver *normal;
int i, retval;
BUG_ON(drv->state);
/*
* Maybe we should be using a slab cache for this, especially if
* we have a large number of ports to handle.
*/
/* 根据driver支持的最大设备数nr 申请nr个 uart_state空间 每个uart_state有一个uart_port */
drv->state = kzalloc(sizeof(struct uart_state) * drv->nr, GFP_KERNEL);
if (!drv->state)
goto out;
/* tty层:分配一个tty_driver,并将drv->tty_driver指向它 */
normal = alloc_tty_driver(drv->nr);
if (!normal)
goto out_kfree;
drv->tty_driver = normal;
/* 将刚刚传入的结构体 struct uart_driver *drv进行一系列的初始化 */
normal->owner = drv->owner; THIS_MODULE
normal->driver_name = drv->driver_name; "OMAP-SERIAL"
normal->name = drv->dev_name; OMAP_SERIAL_NAME
normal->major = drv->major;
normal->minor_start = drv->minor;
normal->type = TTY_DRIVER_TYPE_SERIAL;
normal->subtype = SERIAL_TYPE_NORMAL;
normal->init_termios = tty_std_termios;
normal->init_termios.c_cflag = B9600 | CS8 | CREAD | HUPCL | CLOCAL;
normal->init_termios.c_ispeed = normal->init_termios.c_ospeed = 9600;
normal->flags = TTY_DRIVER_REAL_RAW | TTY_DRIVER_DYNAMIC_DEV;
normal->driver_state = drv;
tty_set_operations(normal, &uart_ops);
/*
* Initialise the UART state(s).
*/
for (i = 0; i < drv->nr; i++) {
struct uart_state *state = drv->state + i;
struct tty_port *port = &state->port;
tty_port_init(port);
port->ops = &uart_port_ops;
port->close_delay = 500; /* .5 seconds */
port->closing_wait = 30000; /* 30 seconds */
}
retval = tty_register_driver(normal);
if (retval >= 0)
return retval;
put_tty_driver(normal);
out_kfree:
kfree(drv->state);
out:
return -ENOMEM;
}
tty核心ops
static const struct tty_operations uart_ops = {
.open = uart_open,
.close = uart_close,
.write = uart_write,
.put_char = uart_put_char, // 单字节写函数
.flush_chars = uart_flush_chars, // 刷新数据到硬件函数
.write_room = uart_write_room, // 指示多少缓冲空闲的函数
.chars_in_buffer= uart_chars_in_buffer, // 只是多少缓冲满的函数
.flush_buffer = uart_flush_buffer, // 刷新数据到硬件
.ioctl = uart_ioctl,
.throttle = uart_throttle,
.unthrottle = uart_unthrottle,
.send_xchar = uart_send_xchar,
.set_termios = uart_set_termios, // 当termios设置被改变时又tty核心调用
.set_ldisc = uart_set_ldisc, // 设置线路规程函数
.stop = uart_stop,
.start = uart_start,
.hangup = uart_hangup, // 挂起函数,当驱动挂起tty设备时调用
.break_ctl = uart_break_ctl, // 线路中断控制函数
.wait_until_sent= uart_wait_until_sent,
#ifdef CONFIG_PROC_FS
.proc_fops = &uart_proc_fops,
#endif
.tiocmget = uart_tiocmget, // 获得当前tty的线路规程的设置
.tiocmset = uart_tiocmset, // 设置当前tty线路规程的设置
.get_icount = uart_get_icount,
#ifdef CONFIG_CONSOLE_POLL
.poll_init = uart_poll_init,
.poll_get_char = uart_poll_get_char,
.poll_put_char = uart_poll_put_char,
#endif
};
uart_register_driver注册过程:
1、根据driver支持的最大设备数,申请n个 uart_state 空间,每一个 uart_state 都有一个 uart_port 。
2、分配一个 tty_driver ,并将drv->tty_driver 指向它。
3、对 tty_driver 进行设置,其中包括默认波特率、校验方式等,还有一个重要的 Ops ,uart_ops ,它是tty核心与我们串口驱动通信的接口。
4、初始化每一个 uart_state 的 tasklet 。
5、注册 tty_driver 。
driver/tty/tty_io.c
int tty_register_driver(struct tty_driver *driver)
{
int error;
int i;
dev_t dev;
void **p = NULL;
struct device *d;
if (!(driver->flags & TTY_DRIVER_DEVPTS_MEM) && driver->num) {
p = kzalloc(driver->num * 2 * sizeof(void *), GFP_KERNEL);
if (!p)
return -ENOMEM;
}
/* 如果没有设备号,则申请 */
if (!driver->major) {
error = alloc_chrdev_region(&dev, driver->minor_start,
driver->num, driver->name);
if (!error) {
driver->major = MAJOR(dev);
driver->minor_start = MINOR(dev);
}
} else {
dev = MKDEV(driver->major, driver->minor_start);
error = register_chrdev_region(dev, driver->num, driver->name); /* "ttyO" */
}
if (error < 0) {
kfree(p);
return error;
}
if (p) { /* 为线路规程和termios创建空间 */
driver->ttys = (struct tty_struct **)p;
driver->termios = (struct ktermios **)(p + driver->num);
} else {
driver->ttys = NULL;
driver->termios = NULL;
}
/* 创建字符设备,并使用cdev->tty_fops */
cdev_init(&driver->cdev, &tty_fops);
driver->cdev.owner = driver->owner;
error = cdev_add(&driver->cdev, dev, driver->num);
if (error) {
unregister_chrdev_region(dev, driver->num);
driver->ttys = NULL;
driver->termios = NULL;
kfree(p);
return error;
}
mutex_lock(&tty_mutex);
/* 将driver->tty_driver添加到全局链表tty_drivers */
list_add(&driver->tty_drivers, &tty_drivers);
mutex_unlock(&tty_mutex);
if (!(driver->flags & TTY_DRIVER_DYNAMIC_DEV)) {
for (i = 0; i < driver->num; i++) {
d = tty_register_device(driver, i, NULL);
if (IS_ERR(d)) {
error = PTR_ERR(d);
goto err;
}
}
}
/* proc文件系统注册driver */
proc_tty_register_driver(driver);
driver->flags |= TTY_DRIVER_INSTALLED;
return 0;
err:
for (i--; i >= 0; i--)
tty_unregister_device(driver, i);
mutex_lock(&tty_mutex);
list_del(&driver->tty_drivers);
mutex_unlock(&tty_mutex);
unregister_chrdev_region(dev, driver->num);
driver->ttys = NULL;
driver->termios = NULL;
kfree(p);
return error;
}
tty_register_driver注册过程:
1. 为线程规程和termios分配空间,将tty_driver相应的成员指向它
2. 注册字符设备,名字是uart_driver->name,即"ttyO"。文件操作函数tty_fops
3. 将driver->tty_friver添加到全局链表tty_drivers
4. proc文件系统添加driver
节点生成
static int serial_omap_probe(struct platform_device *pdev)
/* 添加一个port,里面会生成节点 */
ret = uart_add_one_port(&serial_omap_reg, &up->port);
// driver/tty/serial/serial_core.c
/* 注册 ttyO*设备 */
tty_dev = tty_register_device(drv->tty_driver, uport->line, uport->dev);
// driver/tty/tty_io.c
/* 生成/dev/ttyO*节点 */
return device_create(tty_class, device, dev, NULL, name);