高维数据的快速最近邻算法FLANN
本文作者注:
OpenCV使用方法
flann::Index flannIndex(descriptors_1,flann::LshIndexParams(12,20,2),cvflann::FLANN_DIST_HAMMING);
Mat matchIndex(descriptors_2.rows,2,CV_32SC1),matchDistance(descriptors_2.rows,2,CV_32SC1);
flannIndex.knnSearch(descriptors_2,matchIndex,matchDistance,2,flann::SearchParams());
vector goodMatches;
for (int i = 0;i(i,0)<0.6*matchDistance.at(i,1))
{
DMatch dmatch(i,matchIndex.at(i,0),matchDistance.at(i,0));
goodMatches.push_back(dmatch);
}
}
//调用drawMatches方法可以进行绘画
1. 简介
在计算机视觉和机器学习中,对于一个高维特征,找到训练数据中的最近邻计算代价是昂贵的。对于高维特征,目前来说最有效的方法是 the randomized k-d forest和the priority search k-means tree,而对于二值特征的匹配 multiple hierarchical clusteringtrees则比LSH方法更加有效。
目前来说,fast library for approximate nearest neighbors (FLANN)库可以较好地解决这些问题。
2. 快速近似NN匹配(FAST APPROXIMATE NN MATCHING)
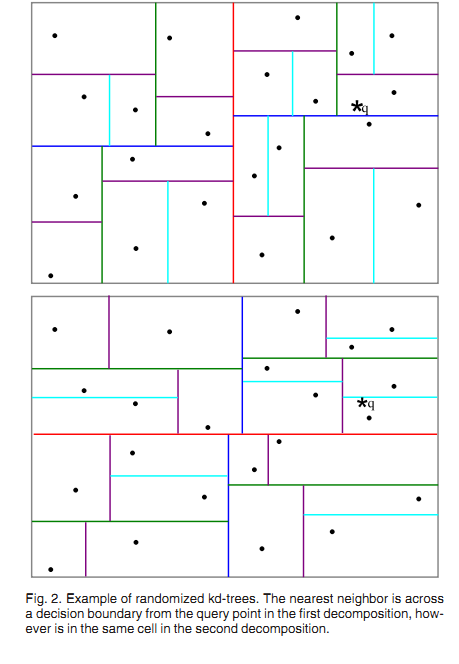
2.1 随机k-d树算法(The Randomized k-d TreeAlgorithm)
a. Classick-d tree
找出数据集中方差最高的维度,利用这个维度的数值将数据划分为两个部分,对每个子集重复相同的过程。
参考http://www.cnblogs.com/eyeszjwang/articles/2429382.html。
b. Randomizedk-d tree
建立多棵随机k-d树,从具有最高方差的N_d维中随机选取若干维度,用来做划分。在对随机k-d森林进行搜索时候,所有的随机k-d树将共享一个优先队列。
增加树的数量能加快搜索速度,但由于内存负载的问题,树的数量只能控制在一定范围内,比如20,如果超过一定范围,那么搜索速度不会增加甚至会减慢。
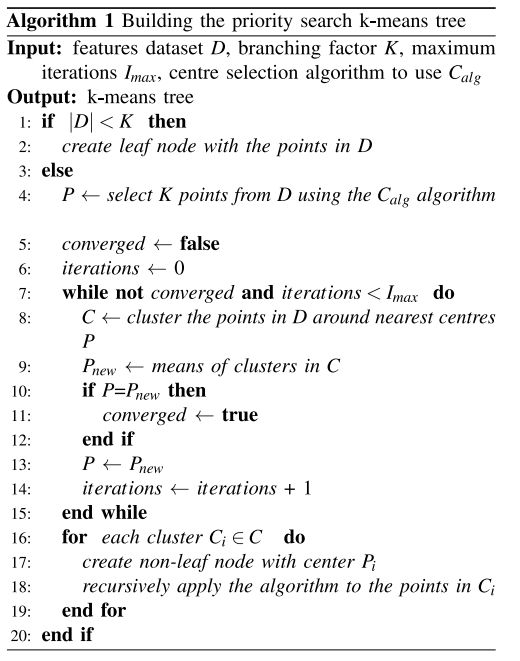
2.2 优先搜索k-means树算法(The Priority Search K-MeansTree Algorithm)
随机k-d森林在许多情形下都很有效,但是对于需要高精度的情形,优先搜索k-means树更加有效。 K-means tree 利用了数据固有的结构信息,它根据数据的所有维度进行聚类,而随机k-d tree一次只利用了一个维度进行划分。
2.2.1 算法描述
算法1 建立优先搜索k-means tree:
(1) 建立一个层次化的k-means 树;
(2) 每个层次的聚类中心,作为树的节点;
(3) 当某个cluster内的点数量小于K时,那么这些数据节点将做为叶子节点。
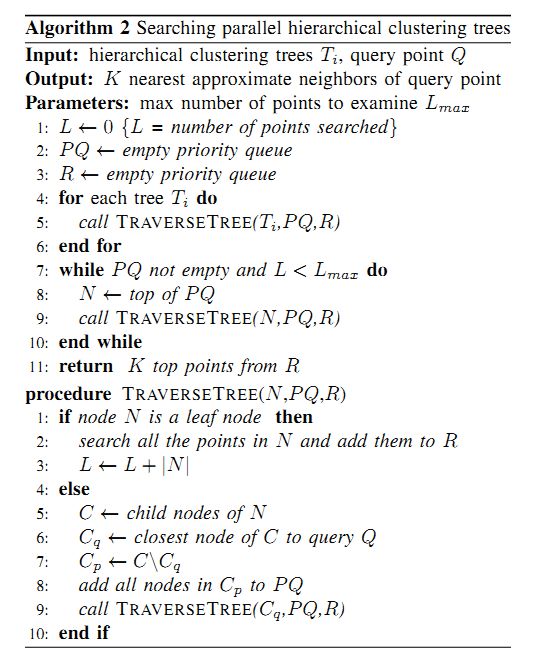
算法2 在优先搜索k-means tree中进行搜索:
(1) 从根节点N开始检索;
(2) 如果是N叶子节点则将同层次的叶子节点都加入到搜索结果中,count += |N|;
(3) 如果N不是叶子节点,则将它的子节点与query Q比较,找出最近的那个节点Cq,同层次的其他节点加入到优先队列中;
(4) 对Cq节点进行递归搜索;
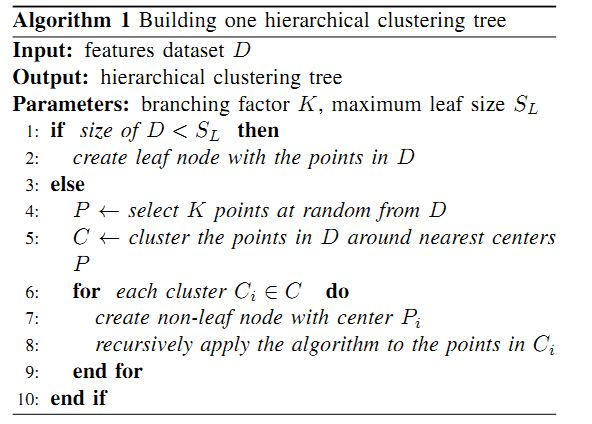
(5) 如果优先队列不为空且 count 聚类的个数K,也称为branching factor 是个非常主要的参数。 建树的时间复杂度 = O( ndKI ( log(n)/log(K) )) n为数据点的总个数,I为K-means的迭代次数。搜索的时间复杂度 = O( L/K * Kd * ( log(n)/(log(K) ) ) = O(Ld ( log(n)/(log(K) ) )。 2.3 层次聚类树 (The Hierarchical ClusteringTree) 层次聚类树采用k-medoids的聚类方法,而不是k-means。即它的聚类中心总是输入数据的某个点,但是在本算法中,并没有像k-medoids聚类算法那样去最小化方差求聚类中心,而是直接从输入数据中随机选取聚类中心点,这样的方法在建立树时更加简单有效,同时又保持多棵树之间的独立性。 同时建立多棵树,在搜索阶段并行地搜索它们能大大提高搜索性能(归功于随机地选择聚类中心,而不需要多次迭代去获得更好的聚类中心)。建立多棵随机树的方法对k-d tree也十分有效,但对于k-means tree却不适用。 FLANN库全称是Fast Library for Approximate Nearest Neighbors,它是目前最完整的(近似)最近邻开源库。不但实现了一系列查找算法,还包含了一种自动选取最快算法的机制。 该类模板是最近邻索引类,该类用于抽象不同类型的最近邻搜索的索引。 参数features,是包含用于构建索引的特征的矩阵;参数params,是包含索引参数的结构。 根据给定的查询数据,利用构建的索引来执行k近邻搜索。 根据给定的查询数据,执行基于半径的最近邻搜索。 将索引存成文件。 得到索引参数。 接下来给出一段小的官方示例程序,使用 FlannBasedMatcher 接口以及函数 FLANN 实现快速高效匹配。 OpenCV提供了 两种Matching方式 : 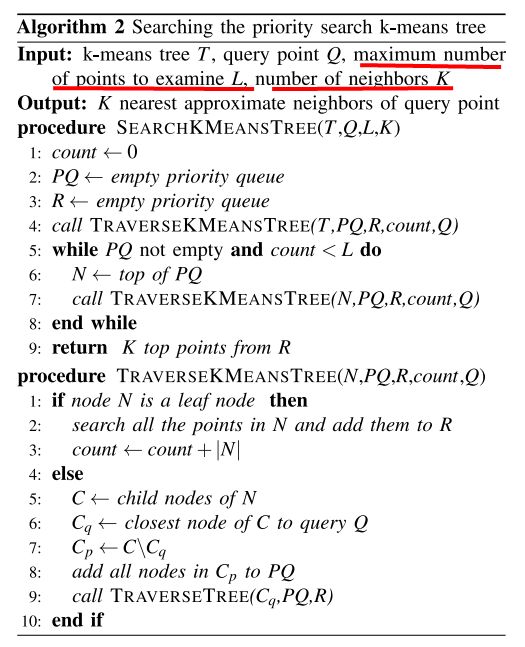
FLANN介绍
flann::Index_类
以下是flann::Index_类的声明:template <typename T>
class
#ifndef _MSC_VER
FLANN_DEPRECATED
#endif
Index_ {
public:
typedef typename L2<T>::ElementType ElementType;
typedef typename L2<T>::ResultType DistanceType;
Index_(const Mat& features, const ::cvflann::IndexParams& params);
~Index_();
void knnSearch(const vector<ElementType>& query, vector<int>& indices, vector<DistanceType>& dists, int knn, const ::cvflann::SearchParams& params);
void knnSearch(const Mat& queries, Mat& indices, Mat& dists, int knn, const ::cvflann::SearchParams& params);
int radiusSearch(const vector<ElementType>& query, vector<int>& indices, vector<DistanceType>& dists, DistanceType radius, const ::cvflann::SearchParams& params);
int radiusSearch(const Mat& query, Mat& indices, Mat& dists, DistanceType radius, const ::cvflann::SearchParams& params);
void save(std::string filename)
{
if (nnIndex_L1) nnIndex_L1->save(filename);
if (nnIndex_L2) nnIndex_L2->save(filename);
}
int veclen() const
{
if (nnIndex_L1) return nnIndex_L1->veclen();
if (nnIndex_L2) return nnIndex_L2->veclen();
}
int size() const
{
if (nnIndex_L1) return nnIndex_L1->size();
if (nnIndex_L2) return nnIndex_L2->size();
}
::cvflann::IndexParams getParameters()
{
if (nnIndex_L1) return nnIndex_L1->getParameters();
if (nnIndex_L2) return nnIndex_L2->getParameters();
}
FLANN_DEPRECATED const ::cvflann::IndexParams* getIndexParameters()
{
if (nnIndex_L1) return nnIndex_L1->getIndexParameters();
if (nnIndex_L2) return nnIndex_L2->getIndexParameters();
}
private:
// providing backwards compatibility for L2 and L1 distances (most common)
::cvflann::Index< L2<ElementType> >* nnIndex_L2;
::cvflann::Index< L1<ElementType> >* nnIndex_L1;
}; 构造函数flann::Index_::Index_
flann::Index_<T>::Index_(const Mat& features, const IndexParams& params)
/*
Parameters:
features – Matrix of containing the features(points) to index. The size of the matrix is num_features x feature_dimensionality and the data type of the elements in the matrix must coincide with the type of the index.
params – Structure containing the index parameters. The type of index that will be constructed depends on the type of this parameter. See the description.
*/
该构造函数所实例的快速搜索结构是根据参数params所指定的特定算法来构建的。params是由IndexParams的派生类的引用。
其中:
* LinearIndexParams,该结构对应的索引进行线性的、暴力(brute-force)的搜索。
struct KDTreeIndexParams : public IndexParams
{
KDTreeIndexParams( int trees = 4 );
};
//trees:The number of parallel kd-trees to use. Good values are in the range
struct KMeansIndexParams : public IndexParams
{
KMeansIndexParams(
int branching = 32,
int iterations = 11,
flann_centers_init_t centers_init = CENTERS_RANDOM,
float cb_index = 0.2 );
};
struct CompositeIndexParams : public IndexParams
{
CompositeIndexParams(
int trees = 4,
int branching = 32,
int iterations = 11,
flann_centers_init_t centers_init = CENTERS_RANDOM,
float cb_index = 0.2 );
};
struct LshIndexParams : public IndexParams
{
LshIndexParams(
unsigned int table_number,
unsigned int key_size,
unsigned int multi_probe_level );
};
struct AutotunedIndexParams : public IndexParams
{
AutotunedIndexParams(
float target_precision = 0.9,
float build_weight = 0.01,
float memory_weight = 0,
float sample_fraction = 0.1 );
};
struct SavedIndexParams : public IndexParams
{
SavedIndexParams( std::string filename );
};
//filename:The filename in which the index was saved. flann::Index_::knnSearch
void flann::Index_<T>::knnSearch(const vector<T>& query, vector<int>& indices, vector<float>& dists, int knn, const SearchParams& params)
void flann::Index_<T>::knnSearch(const Mat& queries, Mat& indices, Mat& dists, int knn, const SearchParams& params) flann::Index_::radiusSearch
int flann::Index_<T>::radiusSearch(const vector<T>& query, vector<int>& indices, vector<float>& dists, float radius, const SearchParams& params)
int flann::Index_<T>::radiusSearch(const Mat& query, Mat& indices, Mat& dists, float radius, const SearchParams& params) flann::Index_::save
void flann::Index_<T>::save(std::string filename) flann::Index_::getIndexParameters
const IndexParams* flann::Index_<T>::getIndexParameters() 利用FLANN进行特征点匹配
这段代码的主要流程分为以下几部分:
OpenCV中KeyPoint Matching的方法
? Brute-force matcher (cv::BFMatcher)
? Flann-based matcher (cv::FlannBasedMatcher)
Brute-force matcher就是用暴力方法找到点集一中每个descriptor在点集二中距离最近的 descriptor;
Flann-based matcher 使用快速近似最近邻搜索算法寻找。
为了提高检测速度,你可以调用matching函数前,先训练一个matcher。训练过程可以首先使用cv:: FlannBasedMatcher来优化,为 descriptor建立索引树,这种操作将在匹配大量数据时发挥巨大作用(比如在上百幅图像的数据集中查找匹配图像)。而 Brute-force matcher在这个过程并不进行操作,它只是将train descriptors保存在内存中。代码示例
#include 实验结果