opencv:特征匹配

一:简述
在前面两节,我们介绍了各种特征检测的算法,SIFT、SURF、HOG、LBP、Haar等等,通过这些算法我们得到了关于一幅图像的特征描述子,接下来我们可以利用这些特征描述子进行图像与图像之间的匹配。
二:FLANN特征匹配
FLANN库全称是Fast Library for Approximate Nearest Neighbors,它是目前最完整的(近似)最近邻开源库。不但实现了一系列查找算法,还包含了一种自动选取最快算法的机制。
高维数据快速最近邻算法FLANN内部算法主要依靠k-d树来实现,关于k-d树的原理以及该算法如何利用kd树进行特征匹配在这篇博客中已经讲述的很清楚了,就不过多进行赘述了,本节主要是实践这个算法。
代码奉上:
#include
#include
#include
#include
using namespace std;
using namespace cv;
using namespace cv::xfeatures2d;
int main() {
Mat Img1 = imread("D:\\opencv\\img1.jpg");
Mat Img2 = imread("D:\\opencv\\img2.jpg");
Mat img1,img2;
resize(Img1, img1, Size(Img1.cols / 8, Img1.rows / 8), (0, 0), (0, 0), INTER_LINEAR);
resize(Img2, img2, Size(Img2.cols / 8, Img2.rows / 8), (0, 0), (0, 0), INTER_LINEAR);
Mat gray_img1, gray_img2;
imshow("img1:",img1);
imshow("img2:", img2);
cvtColor(img1, gray_img1, CV_BGR2GRAY);
cvtColor(img2, gray_img2, CV_BGR2GRAY);
//SURF特征提取
int minHessian = 400;
Ptr detector = SURF::create(minHessian);
vector keyPoint_obj;
vector keyPoint_scene;
Mat descriptor_obj, descriptor_scene;
detector->detectAndCompute(gray_img1, Mat(), keyPoint_obj, descriptor_obj, false);
detector->detectAndCompute(gray_img2, Mat(), keyPoint_scene, descriptor_scene, false);
//匹配
FlannBasedMatcher Matcher;
vector matches;
Matcher.match(descriptor_obj, descriptor_scene, matches);
//寻找最大最小距离
double minDistance = 1000;
double maxDistance = 0;
for (int i = 0; i < descriptor_obj.rows; i++) {
double dist = matches[i].distance;
if (dist < minDistance)
minDistance = dist;
if (dist > maxDistance)
maxDistance = dist;
}
//选取最优的匹配
vector goodMatch;
for (int i = 0; i < descriptor_obj.rows; i++) {
double dist = matches[i].distance;
if (dist < max(2 * minDistance, 0.02)) {
goodMatch.push_back(matches[i]);
}
}
//将匹配关系表示出来
Mat matchesImg;
drawMatches(img1, keyPoint_obj, img2, keyPoint_scene, goodMatch, matchesImg, Scalar::all(-1), Scalar::all(-1),
vector(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
imshow("matchImg", matchesImg);
waitKey(0);
return(0);
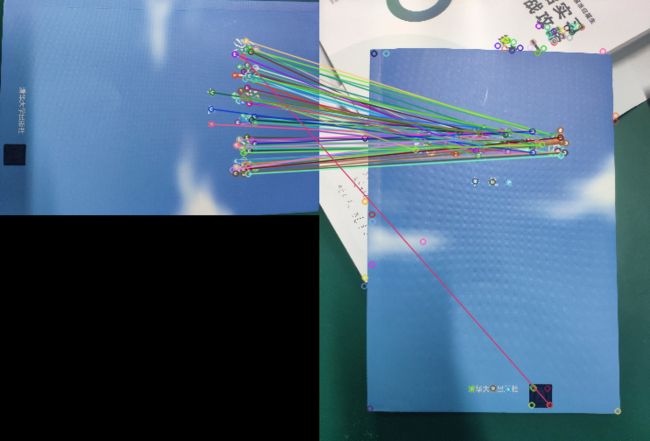
} 执行效果如下所示:

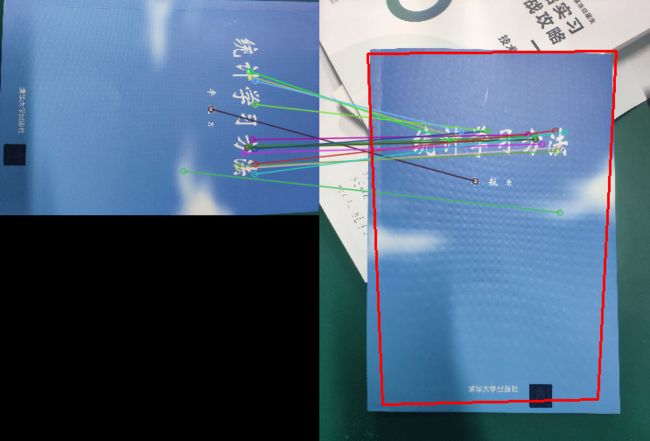
平面对象识别
继续上面的步骤,我们在获得对象的匹配关系后,可以对对象进行识别和定位。主要使用到findHomography和perspectiveTransform两个函数具体功能可以参考这篇博客,在下述代码中阐述:
#include
#include
#include
#include
using namespace std;
using namespace cv;
using namespace cv::xfeatures2d;
int main() {
Mat Img1 = imread("D:\\opencv\\img1.jpg");
Mat Img2 = imread("D:\\opencv\\img2.jpg");
Mat img1,img2;
resize(Img1, img1, Size(Img1.cols / 8, Img1.rows / 8), (0, 0), (0, 0), INTER_LINEAR);
resize(Img2, img2, Size(Img2.cols / 8, Img2.rows / 8), (0, 0), (0, 0), INTER_LINEAR);
Mat gray_img1, gray_img2;
imshow("img1:",img1);
imshow("img2:", img2);
cvtColor(img1, gray_img1, CV_BGR2GRAY);
cvtColor(img2, gray_img2, CV_BGR2GRAY);
//SURF特征提取
int minHessian = 400;
Ptr detector = SURF::create(minHessian);
vector keyPoint_obj;
vector keyPoint_scene;
Mat descriptor_obj, descriptor_scene;
detector->detectAndCompute(gray_img1, Mat(), keyPoint_obj, descriptor_obj, false);
detector->detectAndCompute(gray_img2, Mat(), keyPoint_scene, descriptor_scene, false);
//匹配
FlannBasedMatcher Matcher;
vector matches;
Matcher.match(descriptor_obj, descriptor_scene, matches);
//寻找最大最小距离
double minDistance = 1000;
double maxDistance = 0;
for (int i = 0; i < descriptor_obj.rows; i++) {
double dist = matches[i].distance;
if (dist < minDistance)
minDistance = dist;
if (dist > maxDistance)
maxDistance = dist;
}
//选取最优的匹配
vector goodMatch;
for (int i = 0; i < descriptor_obj.rows; i++) {
double dist = matches[i].distance;
if (dist < max(2 * minDistance, 0.02)) {
goodMatch.push_back(matches[i]);
}
}
//将匹配关系表示出来
Mat matchesImg;
drawMatches(img1, keyPoint_obj, img2, keyPoint_scene, goodMatch, matchesImg, Scalar::all(-1), Scalar::all(-1),
vector(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
imshow("matchImg", matchesImg);
vector obj;
vector objInScene;
for (size_t t = 0; t < goodMatch.size(); t++) {
//queryIdx 为第一图的特征点的 ID,也为query描述子的索引
//pt:关键点的点坐标
obj.push_back(keyPoint_obj[goodMatch[t].queryIdx].pt);
objInScene.push_back(keyPoint_scene[goodMatch[t].trainIdx].pt);
}
//获取变换矩阵
Mat H = findHomography(obj, objInScene, RANSAC);
vector obj_corners(4); //原始坐标的角点
vector scene_corners(4); //透视变换后的对象点
obj_corners[0] = Point(0, 0);
obj_corners[1] = Point(img1.cols, 0);
obj_corners[2] = Point(img1.cols, img1.rows);
obj_corners[3] = Point(0, img1.rows);
//获得变换后对象坐标点
perspectiveTransform(obj_corners, scene_corners, H);
// 画线,因为要在新图中画出识别的对象,因此对象坐标要加上第一张图的宽
line(matchesImg, scene_corners[0] + Point2f(img1.cols, 0), scene_corners[1] + Point2f(img1.cols, 0), Scalar(0, 0, 255), 2, 8, 0);
line(matchesImg, scene_corners[1] + Point2f(img1.cols, 0), scene_corners[2] + Point2f(img1.cols, 0), Scalar(0, 0, 255), 2, 8, 0);
line(matchesImg, scene_corners[2] + Point2f(img1.cols, 0), scene_corners[3] + Point2f(img1.cols, 0), Scalar(0, 0, 255), 2, 8, 0);
line(matchesImg, scene_corners[3] + Point2f(img1.cols, 0), scene_corners[0] + Point2f(img1.cols, 0), Scalar(0, 0, 255), 2, 8, 0);
Mat dst;
cvtColor(gray_img2, dst, COLOR_GRAY2BGR);
line(dst, scene_corners[0], scene_corners[1], Scalar(0, 0, 255), 2, 8, 0);
line(dst, scene_corners[1], scene_corners[2], Scalar(0, 0, 255), 2, 8, 0);
line(dst, scene_corners[2], scene_corners[3], Scalar(0, 0, 255), 2, 8, 0);
line(dst, scene_corners[3], scene_corners[0], Scalar(0, 0, 255), 2, 8, 0);
imshow("find known object demo", matchesImg);
imshow("Draw object", dst);
waitKey(0);
return(0);
} 测试效果:
三:KAZE算法和AKAZE算法
KAZE算法相关学习博客:
- 一点一滴完全突破KAZE特征检测算法(一)
- 一点一滴完全突破KAZE特征检测算法(二)
- 一点一滴完全突破KAZE特征检测算法(三)
- 一点一滴完全突破KAZE特征检测算法(四)
另一个作者的系列笔记共5篇:
KAZE算法原理与源码剖析
AKAZE算法相关学习博客:
AKAZE算法分析
实践代码演示:
#include
#include
#include
#include
using namespace std;
using namespace cv;
using namespace cv::xfeatures2d;
int main() {
Mat Img1 = imread("D:\\opencv\\img1.jpg");
Mat Img2 = imread("D:\\opencv\\img2.jpg");
Mat img1,img2;
resize(Img1, img1, Size(Img1.cols / 8, Img1.rows / 8), (0, 0), (0, 0), INTER_LINEAR);
resize(Img2, img2, Size(Img2.cols / 8, Img2.rows / 8), (0, 0), (0, 0), INTER_LINEAR);
Mat gray_img1, gray_img2;
imshow("img1:",img1);
imshow("img2:", img2);
cvtColor(img1, gray_img1, CV_BGR2GRAY);
cvtColor(img2, gray_img2, CV_BGR2GRAY);
// 提取AKAZE特征描述子
Ptr detector = AKAZE::create();
vector keypoints_obj;
vector keypoints_scene;
Mat descriptor_obj, descriptor_scene;
double t1 = getTickCount();
detector->detectAndCompute(gray_img1, Mat(), keypoints_obj, descriptor_obj);
detector->detectAndCompute(gray_img2, Mat(), keypoints_scene, descriptor_scene);
double t2 = getTickCount();
//计算AKAZE算法消耗的时间
double tkaze = 1000 * (t2 - t1) / getTickFrequency();
printf("AKAZE Time consume(ms) : %f\n", tkaze);
//FLANN匹配
FlannBasedMatcher matcher(new flann::LshIndexParams(20, 10, 2));
vector matches;
matcher.match(descriptor_obj, descriptor_scene, matches);
// 将匹配关系表示出来
Mat akazeMatchesImg;
drawMatches(img1, keypoints_obj, img2, keypoints_scene, matches, akazeMatchesImg);
imshow("akaze match result", akazeMatchesImg);
waitKey(0);
return(0);
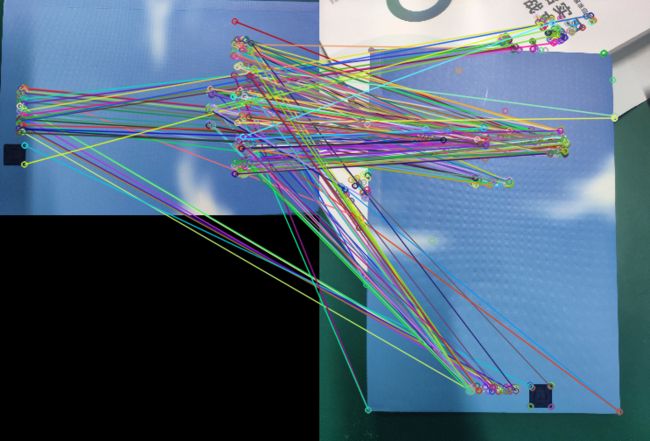
} 效果:
四:BRISK算法
在了解BRISK特征提取算法之前,我们可以先看看该算法的组成部分之一,也就是FAST特征检测算法,该算法的原理可以参考:
FAST特征检测算法
该算法的原理比较简单,之后我们开始学习BRISK算法,关于这个算法的讲解也有很多大佬说的很清楚了,我就不再进行赘述了,下面给出叙述这个算法的一些博客资源:
Brisk特征提取算法
Brisk原文翻译
建议看完上述博客后的朋友如果还是不甚了解,可以结合源码进行学习。下面主要进行该算法的实际应用。
代码:
#include
#include
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
Mat Img1 = imread("D:\\opencv\\img1.jpg");
Mat Img2 = imread("D:\\opencv\\img2.jpg");
Mat img1, img2;
resize(Img1, img1, Size(Img1.cols / 8, Img1.rows / 8), (0, 0), (0, 0), INTER_LINEAR);
resize(Img2, img2, Size(Img2.cols / 8, Img2.rows / 8), (0, 0), (0, 0), INTER_LINEAR);
Mat gray_img1, gray_img2;
imshow("img1:", img1);
imshow("img2:", img2);
cvtColor(img1, gray_img1, CV_BGR2GRAY);
cvtColor(img2, gray_img2, CV_BGR2GRAY);
imshow("box image", img1);
imshow("scene image", img2);
// 提取Brisk特征
Ptr detector = BRISK::create();
vector keypoints_obj;
vector keypoints_scene;
Mat descriptor_obj, descriptor_scene;
detector->detectAndCompute(img1, Mat(), keypoints_obj, descriptor_obj);
detector->detectAndCompute(img2, Mat(), keypoints_scene, descriptor_scene);
// 进行暴力匹配
BFMatcher matcher(NORM_L2);
vector matches;
matcher.match(descriptor_obj, descriptor_scene, matches);
// 将匹配关系表示出来
Mat matchesImg;
drawMatches(img1, keypoints_obj, img2, keypoints_scene, matches, matchesImg);
imshow("BRISK MATCH RESULT", matchesImg);
waitKey(0);
return 0;
}
效果:
总结
关于opencv特征检测、提取、匹配的说明大概就到这里了。可能以后还会有所补充,下面会更新级联分类器的相关知识以及应用