PCL学习笔记6 —— Octree理论以及在PCL 中的代码的实现
建立空间索引在点云数据处理中有着广泛的应用,常见的空间索引一般是自顶而下逐级划分空间的各种空间索引结构,比较有代表性的包括BSP树,KD树,KDB树,R树,四叉树,八叉树等索引结构,而这些结构中,KD树和八叉树使用比较广泛
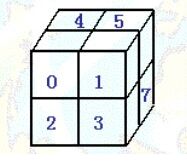
八叉树(Octree)是一种用于描述三维空间的树状数据结构。八叉树的每个节点表示一个正方体的体积元素,每个节点有八个子节点,这八个子节点所表示的体积元素加在一起就等于父节点的体积。一般中心点作为节点的分叉中心。
百度百科释义:
八叉树(Octree)的定义是:若不为空树的话,树中任一节点的子节点恰好只会有八个,或零个,也就是子节点不会有0与8以外的数目。那么,这要用来做什么?想象一个立方体, 我们最少可以切成多少个相同等分的小立方体?答案就是8个。再想象我们有一个房间,房间里某个角落藏着一枚金币,我们想很快的把金币找出来,聪明的你会怎 么做?我们可以把房间当成一个立方体,先切成八个小立方体,然后排除掉没有放任何东西的小立方体,再把有可能藏金币的小立方体继续切八等份….如此下去, 平均在Log8(房间内的所有物品数)的时间内就可找到金币。因此,八叉树就是用在3D空间中的场景管理,可以很快地知道物体在3D场景中的位置,或侦测 与其它物体是否有碰撞以及是否在可视范围内。
实现八叉树的原理 :
(1). 设定最大递归深度。
(2). 找出场景的最大尺寸,并以此尺寸建立第一个立方体。
(3). 依序将单位元元素丢入能被包含且没有子节点的立方体。
(4). 若没达到最大递归深度,就进行细分八等份,再将该立方体所装的单位元元素全部分担给八个子立方体。
(5). 若发现子立方体所分配到的单位元元素数量不为零且跟父立方体是一样的,则该子立方体停止细分,因为跟据空间分割理论,细分的空间所得到的分配必定较少,若是一样数目,则再怎么切数目还是一样,会造成无穷切割的情形。
(6). 重复3,直到达到最大递归深度。
八叉树的逻辑结构如下:
假设要表示的形体V可以放在一个充分大的正方体C内,C的边长为2n,形体V=C,它的八叉树可以用以下的递归方法来定义:八叉树的每个节点与C的一个子立方体对应,树根与C本身相对应,如果V=C,那么V的八叉树仅有树根,如果V≠C,则将C等分为八个子立方体,每个子立方体与树根的一个子节点相对应。只要某个子立方体不是完全空白或完全为V所占据,就要被八等分,从而对应的节点也就有了八个子节点。这样的递归判断、分割一直要进行到节点所对应的立方体或是完全空白,或是完全为V占据,或是其大小已是预先定义的体素大小,并且对它与V之交作一定的“舍入”,使体素或认为是空白的,或认为是V占据的。
PCL中Octree模块及类介绍:
pcl::octree::Octree2BufBase< LeafContainerT, BranchContainerT > 实现了同时存储管理两个八叉树于内存中,可以十分高效的实现八叉树的建立、管理等操作,并且节点实现对临近树节点的结构的探测,对应到空间点云,其就可以对空间曲面的动态变化进行探测,在进行空间动态变化探测中非常有用。
Public Types |
|
| typedef Octree2BufBase< LeafContainerT, BranchContainerT > | OctreeT |
| typedef BufferedBranchNode< BranchContainerT > | BranchNode |
| typedef OctreeLeafNode< LeafContainerT > | LeafNode |
| typedef BranchContainerT | BranchContainer |
| typedef LeafContainerT | LeafContainer |
| typedef OctreeDepthFirstIterator< OctreeT > | Iterator |
| typedef const OctreeDepthFirstIterator< OctreeT > | ConstIterator |
| typedef OctreeLeafNodeIterator< OctreeT > | LeafNodeIterator |
| typedef const OctreeLeafNodeIterator< OctreeT > | ConstLeafNodeIterator |
| typedef OctreeDepthFirstIterator< OctreeT > | DepthFirstIterator |
| typedef const OctreeDepthFirstIterator< OctreeT > | ConstDepthFirstIterator |
| typedef OctreeBreadthFirstIterator< OctreeT > | BreadthFirstIterator |
| typedef const OctreeBreadthFirstIterator< OctreeT > | ConstBreadthFirstIterator |
Public Member Functions |
|
| void | setMaxVoxelIndex (unsigned int max_voxel_index_arg) |
| Set the maximum amount of voxels per dimension. 设置在各个维度的最大的体素个数 | |
| void | setTreeDepth (unsigned int depth_arg) |
| Set the maximum depth of the octree. 设置八叉树的深度,需要在初始化八叉树时设置 | |
| unsigned int | getTreeDepth () const |
| Get the maximum depth of the octree 获得八叉树的深度 | |
| LeafContainerT * | createLeaf (unsigned int idx_x_arg, unsigned int idx_y_arg, unsigned int idx_z_arg) |
| Create new leaf node at (idx_x_arg, idx_y_arg, idx_z_arg). 创建叶节点 | |
| LeafContainerT * | findLeaf (unsigned int idx_x_arg, unsigned int idx_y_arg, unsigned int idx_z_arg) |
| Find leaf node at (idx_x_arg, idx_y_arg, idx_z_arg). 找出页节点 | |
| bool | existLeaf (unsigned int idx_x_arg, unsigned int idx_y_arg, unsigned int idx_z_arg) const |
| Check for the existence of leaf node at (idx_x_arg, idx_y_arg, idx_z_arg). 判断在(idx_x_arg, idx_y_arg, idx_z_arg)对应的叶子节点是否存在 | |
| void | removeLeaf (unsigned int idx_x_arg, unsigned int idx_y_arg, unsigned int idx_z_arg) |
| Remove leaf node at (idx_x_arg, idx_y_arg, idx_z_arg). 移除在(。。。)的节点 | |
| std::size_t | getLeafCount () const |
| Return the amount of existing leafs in the octree.返回八叉树叶子的个数 | |
| std::size_t | getBranchCount () const |
| Return the amount of existing branches in the octree. 返回八叉树分支的个数 | |
| void | deleteTree () |
| Delete the octree structure and its leaf nodes. 删除八叉树结构包括节点 | |
| void | deletePreviousBuffer () |
| Delete octree structure of previous buffer. 删除另一个缓存区对应的八叉树的结构及其字节点 | |
| void | deleteCurrentBuffer () |
| Delete the octree structure in the current buffer删除当前缓存区对应的八叉树的结构及其字节点 | |
| void | switchBuffers () |
| Switch buffers and reset current octree structure. 交换缓存区中对应的八叉树的结构和其叶子节点 | |
| void | serializeTree (std::vector< char > &binary_tree_out_arg, bool do_XOR_encoding_arg=false) |
| Serialize octree into a binary output vector describing its branch node structure. | |
| void | serializeTree (std::vector< char > &binary_tree_out_arg, std::vector< LeafContainerT &leaf_container_vector_arg, bool do_XOR_encoding_arg=false) |
| Serialize octree into a binary output vector describing its branch node structure and and push all DataT elements stored in the octree to a vector.串行化输出八叉树结构 | |
| void | serializeLeafs (std::vector< LeafContainerT * > &leaf_container_vector_arg) |
| Outputs a vector of all DataT elements that are stored within the octree leaf nodes. | |
| void | serializeNewLeafs (std::vector< LeafContainerT * > &leaf_container_vector_arg) |
| Outputs a vector of all DataT elements from leaf nodes, that do not exist in the previous octree buffer | |
| void | deserializeTree (std::vector< char > &binary_tree_in_arg, bool do_XOR_decoding_arg=false) |
| Deserialize a binary octree description vector and create a corresponding octree structure. | |
| void | deserializeTree (std::vector< char > &binary_tree_in_arg, std::vector< LeafContainerT &leaf_container_vector_arg, bool do_XOR_decoding_arg=false) |
| Deserialize a binary octree description and create a corresponding octree structure. | |
应用实例
点云由海量的数据集组成,这些数据集通过距离 颜色 法线 等附加信息来描述空间的三维点,此外,点云还能易非常高的速度被创建出来,因此需要占用相当大的存储资源,一旦点云需要存储或者通过速率受限制的通信信道进行传输,提供针对这种数据的压缩方法就变得十分有用,PCL 提供了点云的压缩功能,它允许编码压缩所有类型的点云。
// Octree.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。
//point_cloud_compression
#include "pch.h"
#include
#define BOOST_TYPEOF_EMULATION
#include // 点云类型
#include //点数据类型
#include //点云获取接口类
#include //点云可视化类
#include //点云压缩类
#include
#include
#include
#ifdef WIN32
# define sleep(x) Sleep((x)*1000)
#endif
class SimpleOpenNIViewer
{
public:
SimpleOpenNIViewer() :
viewer(" Point Cloud Compression Example")
{
}
/************************************************************************************************
在OpenNIGrabber采集循环执行的回调函数cloud_cb_中,首先把获取的点云压缩到stringstream缓冲区,下一步就是解压缩,
它对压缩了的二进制数据进行解码,存储在新的点云中解码了点云被发送到点云可视化对象中进行实时可视化
*************************************************************************************************/
void cloud_cb_(const pcl::PointCloud::ConstPtr &cloud)
{
if (!viewer.wasStopped())
{
// 存储压缩点云的字节流对象
std::stringstream compressedData;
// 存储输出点云
pcl::PointCloud::Ptr cloudOut(new pcl::PointCloud());
// 压缩点云
PointCloudEncoder->encodePointCloud(cloud, compressedData);
// 解压缩点云
PointCloudDecoder->decodePointCloud(compressedData, cloudOut);
// 可视化解压缩的点云
viewer.showCloud(cloudOut);
}
}
/**************************************************************************************************************
在函数中创建PointCloudCompression类的对象来编码和解码,这些对象把压缩配置文件作为配置压缩算法的参数
所提供的压缩配置文件为OpenNI兼容设备采集到的点云预先确定的通用参数集,本例中使用MED_RES_ONLINE_COMPRESSION_WITH_COLOR
配置参数集,用于快速在线的压缩,压缩配置方法可以在文件/io/include/pcl/compression/compression_profiles.h中找到,
在PointCloudCompression构造函数中使用MANUAL——CONFIGURATION属性就可以手动的配置压缩算法的全部参数
******************************************************************************************************************/
void run()
{
bool showStatistics = true; //设置在标准设备上输出打印出压缩结果信息
// 压缩选项详情在: /io/include/pcl/compression/compression_profiles.h
pcl::io::compression_Profiles_e compressionProfile = pcl::io::MED_RES_ONLINE_COMPRESSION_WITH_COLOR;
// 初始化压缩和解压缩对象 其中压缩对象需要设定压缩参数选项,解压缩按照数据源自行判断
PointCloudEncoder = new pcl::io::OctreePointCloudCompression(compressionProfile, showStatistics);
PointCloudDecoder = new pcl::io::OctreePointCloudCompression();
/***********************************************************************************************************
下面的代码为OpenNI兼容设备实例化一个新的采样器,并且启动循环回调接口,每从设备获取一帧数据就回调函数一次,,这里的
回调函数就是实现数据压缩和可视化解压缩结果。
************************************************************************************************************/
//创建从OpenNI获取点云的抓取对象
pcl::Grabber* interface = new pcl::io::OpenNI2Grabber();
// 建立回调函数
boost::function::ConstPtr&)> f = boost::bind(&SimpleOpenNIViewer::cloud_cb_, this, _1);
//建立回调函数和回调信息的绑定
boost::signals2::connection c = interface->registerCallback(f);
// 开始接受点云的数据流
interface->start();
while (!viewer.wasStopped())
{
sleep(1);
}
interface->stop();
// 删除压缩与解压缩的实例
delete (PointCloudEncoder);
delete (PointCloudDecoder);
}
pcl::visualization::CloudViewer viewer;
pcl::io::OctreePointCloudCompression* PointCloudEncoder;
pcl::io::OctreePointCloudCompression* PointCloudDecoder;
};
int
main(int argc, char **argv)
{
SimpleOpenNIViewer v; //创建一个新的SimpleOpenNIViewer 实例并调用他的run方法
v.run();
return (0);
}
提示:编译时候可能报错pcl181\3rdparty\boost\include\boost-1_64\boost\iostreams\positioning.hpp(96): error C2039: “seekpos”: 不是“std::fpos<_Mbstatet>”的成员解决办法看这里
图示为带有RGB纹理信息的实时可视化结果,缩放可视化结果看到经过压缩后点云进行了重采样,纹理信息有所丢失,但数据量有所减小,在实际应用中需要折中取舍 。下次上图
同时在压缩和解压缩的过程中 因为设置compressedData为true所以在标准输出上打印处压缩率帧数等信息:
下次上图。
压缩配置文件:压缩配置文件为PCL点云编码器定义了参数集,并针对压缩从openNI采集器获取的普通点云进行了优化设置,注意,解码对象不需要用参数表示,因为它在解码是检测并获取对应编码参数配置,例如下面的压缩配置文件
LOW_RES_ONLINE_COMPRESSION_WITHOUT_COLOR, //分别率为 1 cm^3 无颜色 快速在线编码
LOW_RES_ONLINE_COMPRESSION_WITH_COLOR, //分别率为 1 cm^3 有颜色 快速在线编码
MED_RES_ONLINE_COMPRESSION_WITHOUT_COLOR, //分别率为 5 mm^3 无颜色 快速在线编码
MED_RES_ONLINE_COMPRESSION_WITH_COLOR, //分别率为 5 mm^3 有颜色 快速在线编码
HIGH_RES_ONLINE_COMPRESSION_WITHOUT_COLOR, //分别率为 1 mm^3 无颜色 快速在线编码
HIGH_RES_ONLINE_COMPRESSION_WITH_COLOR, //分别率为 1 mm^3 有颜色 快速在线编码
LOW_RES_OFFLINE_COMPRESSION_WITHOUT_COLOR, //分别率为 1 cm^3 无颜色 高效离线编码
LOW_RES_OFFLINE_COMPRESSION_WITH_COLOR, //分别率为 1 cm^3 有颜色 高效离线编码
MED_RES_OFFLINE_COMPRESSION_WITHOUT_COLOR, //分别率为 5 mm^3 无颜色 高效离线编码
MED_RES_OFFLINE_COMPRESSION_WITH_COLOR, //分别率为 5 mm^3 有颜色 高效离线编码
HIGH_RES_OFFLINE_COMPRESSION_WITHOUT_COLOR, //分别率为 1 mm^3 无颜色 高效离线编码
HIGH_RES_OFFLINE_COMPRESSION_WITH_COLOR, //分别率为 1 mm^3 有颜色 高效离线编码
MANUAL_CONFIGURATION //允许为高级参数化进行手工配置
原文链接:https://blog.csdn.net/u013019296/article/details/70052307