ORB-SLAM2详解(三)自动地图初始化
ORB-SLAM2详解(三)自动地图初始化
欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/
系统的第一步是初始化,ORB_SLAM使用的是一种自动初始化方法。这里同时计算两个模型:用于平面场景的单应性矩阵H和用于非平面场景的基础矩阵F,然后通过一个评分规则来选择合适的模型,恢复相机的旋转矩阵R和平移向量t。
一、找到初始对应点
在当前帧 Fc 中提取ORB特征点,与参考帧Fr进行匹配。如果匹配点对数过少,就重置参考帧。这一步骤在Tracking.cc中的Tracking::MonocularInitialization函数中。
- 1
- 1
nmatches表示匹配到的对应点对数。
二、同时计算两个模型
在找到对应点之后,开始调用Initializer.cc中的Initializer::Initialized函数进行初始化工作。为了计算R和t,ORB_SLAM为了针对平面和非平面场景选择最合适的模型,同时开启了两个线程,分别计算单应性矩阵 Hcr 和基础矩阵 Fcr 。如下所示:
- 1
- 2
- 1
- 2
这里的H和F分别满足下列关系:
线程threadH调用 Initializer::FindHomography 函数,计算单应性矩阵H,采用归一化的直接线性变换(normalized DLT)。线程threadF调用 Initializer::FindFundamental 函数计算基础矩阵F,使用归一化8点法。为了评估哪个模型更合适,文中使用 SH 和 SF 来计算各自的分值。分别调用 Initializer::CheckHomography 函数和 Initializer::CheckFundamental 函数进行计算,计算的方法如下所示,其中 SM 统一表示 SH 和 SF :
其中, d2cr 和 d2rc 表示对称的转换误差,分别是从当前帧到参考帧的变换误差和参考帧到当前帧的变换误差。这里:
三、模型选择
文中认为,当场景是一个平面、或近似为一个平面、或者视差较小的时候,可以使用单应性矩阵H,而使用基础矩阵F恢复运动,需要场景是一个非平面、视差大的场景。这个时候,文中使用下面所示的一个机制,来估计两个模型的优劣:
当 RH 大于0.45时,选择从单应性变换矩阵还原运动。不过ORB_SLAM2源代码中使用的是0.4作为阈值,如下:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
四、运动恢复(sfm)
选择好模型后,就可以恢复运动。
(1)从单应性变换矩阵H中恢复
在求得单应性变化H后,本文使用FAUGERAS的论文[1]的方法,提取8种运动假设。这个方法通过可视化约束来测试选择合理的解。但是如果在低视差的情况下,点云会跑到相机的前面或后面,测试就会出现错误从而选择一个错误的解。文中使用的是直接三角化8种方案,检查两个相机前面具有较少的重投影误差情况下,在视图低视差情况下是否大部分云点都可以看到。如果没有一个解很合适,就不执行初始化,重新从第一步开始。这种方法在低视差和两个交叉的视图情况下,初始化程序更具鲁棒性。程序中调用Initializer::ReconstructH函数恢复运动。
(2)从基础矩阵F中恢复
在得到基础矩阵F,并且一直摄像机内参K的情况下,可以计算得到本质矩阵E,然后使用[2]中的方法,恢复出4个运动假设的解。这一部分的理论推导在之前博客做过介绍。其中基础矩阵F得到本质矩阵E的公式如下所示:
同样的,这4个解中只有一个是合理的,可以使用可视化约束来选择,本文使用与单应性矩阵做sfm一样的方法,即将4种解都进行三角化,然后从中选择出最合适的解。这里使用的是 Initializer::ReconstructF 函数。
五、集束调整
最后使用一个全局集束调整(BA),优化初始化结果。这一部分是在Tracking.cc中的CreateInitialMapMonocular()函数中,使用了如下语句:
- 1
- 1
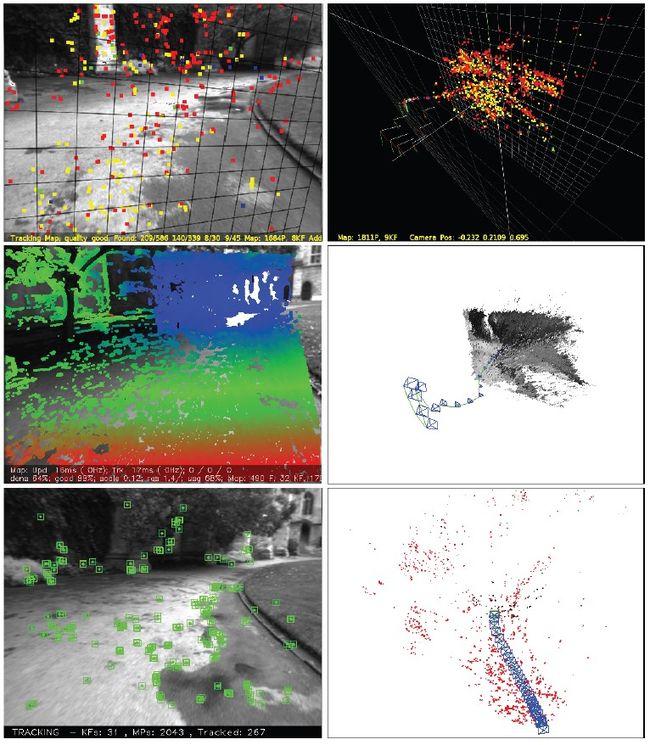
如下图所示,PTAM和LSD_SLAM在这个数据集中,会将所有点初始化在一个平面上,而ORB_SLAM会一直等到有足够的视差,才使用基础矩阵,得到最正确的初始化。由于ORB-SLAM对初始化的要求较高,因此初始化时可以选择一个特征丰富的场景,移动摄像机给它提供足够的视差。另外,由于坐标系会附着在初始化成功的那帧图像的位置,因此每次初始化不能保证在同一个位置。
引用
[1]. O.D.Faugeras and F.Lustman. “Motion and structure from motion in a piecewise planar environment.” International Journal of Pattern Recognation and Artificial Intelligence, vol.2, no.03,pp.485-508,1988.
[2]. R.Hartley and A. Zisserman, Multiple View Geometry in Computer Vision, 2nd ed. Cambridge University Press,2004.