无人机概述
无人驾驶飞机,简称无人机,英文Unmaned Aerial Vehicle, UAV。也就是说,无人机所表示的是没有驾驶员的飞机,飞机通过机载的计算机系统自动对飞行的平衡进行有效的控制,并通过预先设定或飞机自动生成的复杂航线进行飞行,并在飞行过程中自动执行相关任务和异常处理。通常无人机分为完全离线飞机与半离线飞机,完全离线飞机可完全不与地面系统进行交互,自动完成一个或多个飞行任务,并在执行完任务之后返航或在指定地点降落;半离线飞机在自动执行飞行任务期间,可由地面系统(地面站)进行指令控制,人工干预其飞行任务,并在紧急情况下执行地面系统的紧急命令,例如:返航、迫降、自毁等。可以说,无人机是由机载计算机系统和地面系统一起组合起来的可以自行完成飞行任务的无驾驶员的飞行器。从控制上讲可以完全脱离地面的实时控制,其组成由飞机机架、动力系统、自平衡系统、导航系统、航线规划系统、感知系统、任务执行系统、与地面站通讯系统等等。从用途上讲,无人机主要用于军事用途或特殊民用。
近年来,由于开源无人机飞行控制器及自动飞机驾驶仪的不断发展,技术已经趋于成熟,全世界数以万计的优秀人才在为开源无人机项目贡献代码。使得越来越多的普通人可以轻松进入这个领域。通常,无人机分为三类:固定翼飞机、单旋翼直升机、多旋翼直升机。在早期,固定翼飞机与直升机占有主导地位,近十年来多旋翼的理论日趋成熟,组装简单,超控灵活,渐渐成为了人们喜爱的无人机。
固定翼飞机
依靠推进系统(前拉式螺旋桨或后推式螺旋桨)产生前进的动力,从而使飞机快速前行。当飞机获得了前进的速度后,由气流的作用到飞机的翼展上(伯努利原理)产生上升的拉力,当拉力大于机身重力时,飞机处于上升飞行状态。固定翼飞的左右(横滚)平衡依靠左右主机翼的掠角大小来调节,前后(俯仰)平衡依靠尾舵的掠角来调节,方向(航向)依靠垂向尾舵来调节,当然,固定翼飞机的航向通常是靠横滚和俯仰组合动作来完成,这不是我们的主要研究方向,在这里不再赘述。
优点:续航时间长,速度快。
缺点:需要跑道,不能垂直起降。

单旋翼直升机
单旋翼直升机简称为直升机。我们在这里所讲述的单旋翼和多旋翼在机械结构、控制原理、飞行理论上有本质的区别,请读者不要混淆。单旋翼直升机(以后简称直升机)主动力系统只有一个大型的螺旋桨,主要作用是提供飞行的上升动力,所以当上升动力大于机身重力时,飞机处于上升状态。而由于直升机只有一个主动力桨,当主动力电机高速旋转时,螺旋桨的旋转会对机身产生一个反向的作用力——反扭力。在反扭力的作用下,飞机会产生与螺旋桨旋转方向相反的自旋。为了解决直升机的自旋,就需要在飞机的尾部追加一个水平方向的小型螺旋桨,其产生的拉力主要用于抵消机身自旋,当直升机需要改变航向时,也可以通过尾部螺旋桨来调节。除了主动力电机与尾翼电机之外,通常还有三个舵机,用于改变主动力桨的螺距,使机身产生横滚和俯仰姿态,从而使飞机前飞、后飞或向左、向右飞行。
优点:可以垂直起降,空中悬停。
缺点:续航时间短,机械结构繁杂,操控难度大,飞行速度慢。

多旋翼直升机
由三个、四个或更多螺旋桨所组成的无机。最典型、最常见的就是四旋翼直升机(以后简称四旋翼)。四旋翼有四个轴,安装四个螺旋桨,同样可以由螺旋桨的高速旋转产生向上的拉力实现垂直起降。但与直升机不同的是,多旋翼的前进、后退、向左、向右飞行靠的是四个螺旋桨不同的转速,而不是像直升机那样靠改变主动力桨的螺距,因为四旋翼桨的螺距是固定的,桨的尺寸也是固定的。四旋翼的四个轴的轴距通常也是相同的,所以其动力体系通常也是对称的。三旋翼、六旋翼、八旋翼或其它多旋翼除了将动力和力矩分配到多个螺旋桨的方案不同之外,与四旋翼没有本质上的区别。可以说,学习并掌握了四旋翼之后,也就可以举一反三的懂得了其它多旋翼的原理与动力系统。
优点:可以垂直起降,空中悬停,结构简单,操作灵活。
缺点:续航时间短,飞行速度慢。

四旋翼飞行器结构
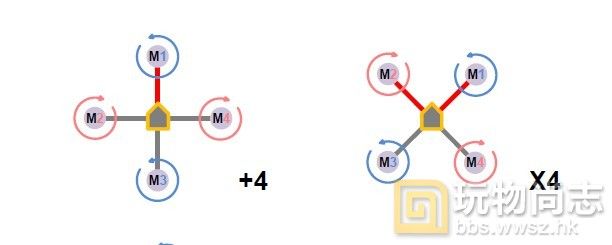
四轴飞行器四个电机呈十字形排列, 驱动四片桨旋转产生向上的推力。四个电机轴距几何中心的距离相等, 当对角两个轴产生的升力相同时能够保证力矩的平衡, 四轴不会向任何一个方向倾转; 而四个电机一对正转,一对反转的方式使得绕竖直轴方向旋转的反扭矩平衡, 保证了四轴航向的稳定。
与传统的直升机相比,四旋翼飞行器有下列优势:各个旋翼对机身所施加的反扭矩与旋翼的旋转方向相反,因此当电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,可以平衡旋翼对机身的反扭矩。
根据用户自定义的机头的位置不同,四轴飞行器可以分为x模式和+模式。x模式的机头方向位于两个电机之间,而+模式的机头方向位于某一个电机上。x和+就是表示正对机头方向时飞行器的形状。如下图所示。x模式要难飞一点,但动作更灵活。+模式要好飞一点,动作灵活差一点,所以适合初学者。特别注意,x模式和+模式的飞控安装是不同的。如果飞控板安装错误,会剧烈的晃动,根本无法飞。
空气动力原理
四旋翼飞行器在空间共有6个自由度(分别沿3个坐标轴作平移和旋转动作),这6个自由度的控制都可以通过调节不同电机的转速来实现。基本运动状态分别是:
- 垂直运动;
- 俯仰运动;
- 滚转运动;
- 偏航运动;
- 前后运动;
- 侧向运动。
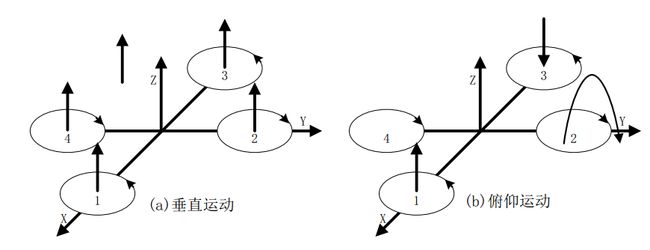
在图中,电机1和电机3作逆时针旋转,电机2和电机4作顺时针旋转,规定沿x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
垂直运动:垂直运动相对来说比较容易。在图中,因有两对电机转向相反,可以平衡其对机身的反扭矩,当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。保证四个旋翼转速同步增加或减小是垂直运动的关键。
俯仰运动:在图(b)中,电机1的转速上升,电机3的转速下降,电机2、电机4的转速保持不变。为了不因为旋翼转速的改变引起四旋翼飞行器整体扭矩及总拉力改变,旋翼1与旋翼3转速该变量的大小应相等。由于旋翼1的升力上升,旋翼3的升力下降,产生的不平衡力矩使机身绕y轴旋转(方向如图所示),同理,当电机1的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
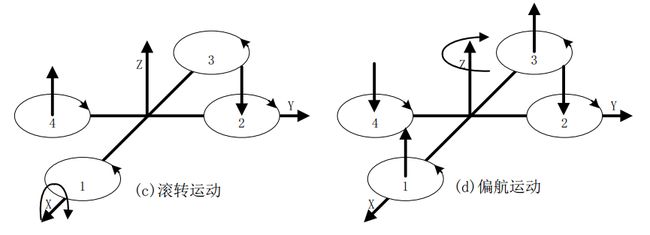
滚转运动:与图b的原理相同,在图c中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕x轴旋转(正向和反向),实现飞行器的滚转运动。
偏航运动:四旋翼飞行器偏航运动可以借助旋翼产生的反扭矩来实现。旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。在图d中,当电机1和电机3的转速上升,电机2和电机4的转速下降时,旋翼1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在富余反扭矩的作用下绕z轴转动,实现飞行器的偏航运动,转向与电机1、电机3的转向相反。
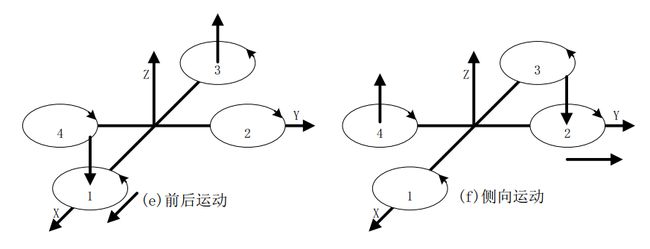
前后运动:要想实现飞行器在水平面内前后、左右的运动,必须在水平面内对飞行器施加一定的力。在图e中,增加电机3转速,使拉力增大,相应减小电机1转速,使拉力减小,同时保持其它两个电机转速不变,反扭矩仍然要保持平衡。按图b的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动。向后飞行与向前飞行正好相反。当然在图b图c中,飞行器在产生俯仰、翻滚运动的同时也会产生沿x、y轴的水平运动。
倾向运动:在图f中,由于结构对称,所以倾向飞行的工作原理与前后运动完全一样。
总得来说就是控制四个电机的速度了。然后相应的提高速度和减慢速度就可以让四轴动起来了。
参考:
https://www.zhihu.com/org/chen-yang-wu-ju-ke-ji/posts?page=2
http://bbs.eeworld.com.cn/thread-449222-1-1.html
https://blog.csdn.net/AASDSADAD/article/details/72872357