OpenCV 系列 --- 凸包
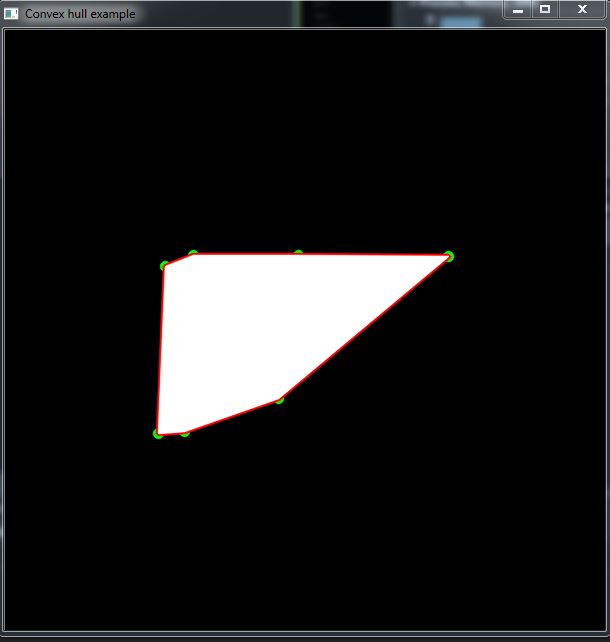
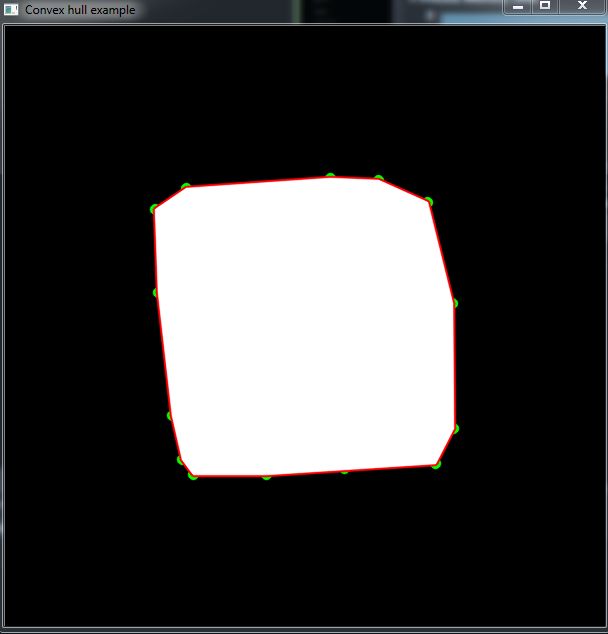
对某些算法来说,比如在一些利用特征点的算法中,通常需要凸包将一些选定的点包含进来。比如给定如下图(第一行),利用Harris角点检测算法得到一些特征点(第二行),我们想得到包含这些特征点的一个凸包(第三行)。



1 为了得到这个结果,可以利用OpenCV提供的凸包函数,函数原型如下:
void convexHull(InputArray points, OutputArray hull, bool clockwise=false, bool returnPoints=true )- points: 输入二维点集,利用Mat或者vector存储
- hull: 输出的convex hull点集。有两种情况:直接点集合或者points的索引
- false: 负责顺时针或者逆时针
- returnPoints: 控制传回的是点集,还是点集的索引
2 程序示例
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
using namespace std;
using namespace cv;
int main()
{
Mat img(600, 600, CV_8UC3);
RNG& rng = theRNG();
vector<int> counts;
int ii;
int numIter = 10;
//生成10个随机数,每个数代表一次实验中特征点的个数
for (ii = 0; ii < numIter; ++ii)
{
counts.push_back((unsigned)rng % 100 + 3);
}
int numPair;
vector<int>::iterator iter;
//进行10次实验
for (iter = counts.begin();iter != counts.end();++iter)
{
numPair = *iter;//当前实验中生成的点的个数
vector在此示例程序中,有如下一句代码
fillPoly(img, allPts, &numberOfPoints, 1, Scalar(255, 255, 255), CV_AA);这句代码的作用,是对生成的凸包区域进行填充。
3 程序示意图