stm32 学习 (设置TIM4输出4路 pwm J-LINK仿真验证)
使用单片机:stm32f103c8t6 资源
RAM: 20K; flash: 64K;CPU频率: 72M;通用I/O: 32个;UART: 3个;SPI:2个;USB:1个;CAN: 1个;IIC: 2个
12 位同步 ADC: 2 组 10 通道 ; 工作电压: 2.0 至 3.6V
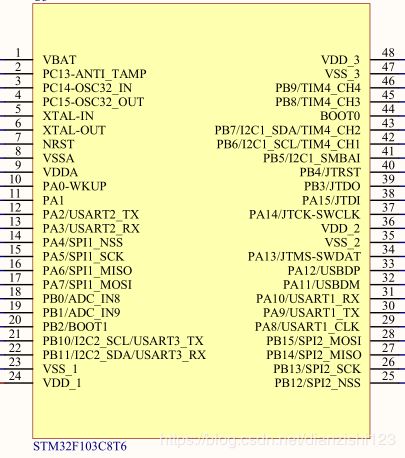
原理图:
PWM输出过程:
1. 脉冲计数器 TIMx_CNT 为向上计数。
2. 重载计数器 TIMx_ARR 配置为N。(TIM_Period值)
3. TIMx_CNT的当前计数值 X 在TIMxCLK时钟源驱动下不断累加; 脉冲计数器 TIMx_CNT 数值 X 大于 重载计数器 TIMx_ARR 值 N 时,会重置 TIMx_CNT 值为0,重新计数。
4. TIMx_CNT计数同时,TIMx_CNT的计数值 X 会与比较寄存器(TIMx_CRR) 的值A 进行比较 ( TIM_Pulse ) ,脉冲计数器(TIMx_CNT)数值 X 小于 比较寄存器 (TIMx_CCR)的值 A 时输出高/低电平。
5. X >= A 时输出低电平(高电平) ; PWM占空比:A/(N+1)
stm32的pwm输出只要设置好在主循环前调用一次即可, 对用的IO就可以持续的输出PWM
TIM4配置PWM过程程序:

J-LINK仿真配置
1. 选择“ Options for Target” 选项

2. 在“ Debug” 中选择“Use Simulator" 注意下面的配置

3. 配置好编译下

4. 选择Debug模式调试
5. 进入Debug模式后选择

6. 配置pwm输出引脚

7.


配置好输出引脚直接”close“掉
8. 开始仿真运行


贴一下程序记录下:
/*
//TIM4 CH1 PWM 输出设置
//PWM 输出初始化
//arr:自动重装值
//psc:时钟预分频数
STM32F103C8T6
PB6 - TIM4_CH1
PB7 - TIM4_CH2
PB8 - TIM4_CH3
PB9 - TIM4_CH4
*/
void Tim4_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能 TIMx 外设
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能 PB 时钟
TIM_DeInit(TIM4);
//设置该引脚为复用输出功能,输出 TIM4 CH1 的 PWM 脉冲波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9; //TIM4_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用功能输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化 GPIO
TIM_TimeBaseStructure.TIM_Period = arr; //设置自动重装载周期值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置预分频值 不分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //初始化 TIMx
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //CH1 PWM2 模式
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Disable;
TIM_OCInitStructure.TIM_Pulse = 200; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //OC1 高电平有效
TIM_OC1Init(TIM4, &TIM_OCInitStructure); //根据指定的参数初始化外设 TIMx
TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable); //CH1 预装载使能
TIM_OCInitStructure.TIM_Pulse = 400; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //OC2 高电平有效
TIM_OC2Init(TIM4, &TIM_OCInitStructure); //根据指定的参数初始化外设 TIMx
TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable); //CH2 预装载使能
TIM_OCInitStructure.TIM_Pulse = 600; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //OC1 高电平有效
TIM_OC3Init(TIM4, &TIM_OCInitStructure); //根据指定的参数初始化外设 TIMx
TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable); //CH3 预装载使能
TIM_OCInitStructure.TIM_Pulse = 800; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //OC1 高电平有效
TIM_OC4Init(TIM4, &TIM_OCInitStructure); //根据指定的参数初始化外设 TIMx
TIM_OC4PreloadConfig(TIM4, TIM_OCPreload_Enable); //CH4 预装载使能
TIM_ARRPreloadConfig(TIM4, ENABLE); //使能 TIMx 在 ARR 上的预装载寄存器
// TIM_CtrlPWMOutputs(TIM4,ENABLE); //MOE 主输出使能,高级定时器必须开启
TIM_Cmd(TIM4, ENABLE); //使能 TIMx
}参考链接:http://www.openedv.com/posts/list/56473.htm
https://blog.csdn.net/wwt18811707971/article/details/74906149
https://blog.csdn.net/kevin_iot/article/details/61650516