STM32学习记录——L298N电机驱动
文章目录
- 前言
- 一、学习目的
- 二、模块介绍
- 三、代码记录
前言
之前做了一个很普通的蓝牙小车,其实很早就想做,但是一直拖着,最大的原因就是电机驱动的问题。由于一直不清楚电机驱动的用法以及一些细节,加上网上的资料五花八门,导致作为新手,学习起来很困难,后来也是经过漫长的摸索和学长的讲解,终于初窥门径,在这里记录一下。
一、学习目的
我的学习目的就是通过电机驱动模块,驱动电机并且控制电机的转速和正转反转,最终同时驱动两个电机,完成小车的轮子部分。
二、模块介绍
今天要介绍的是很常见的L298N电机驱动模块,它有三种工作方式,由于我只记录我的学习,所以我直接讲我使用的工作方式,也是比较好用的一种。首先看看它各个位置的功能:
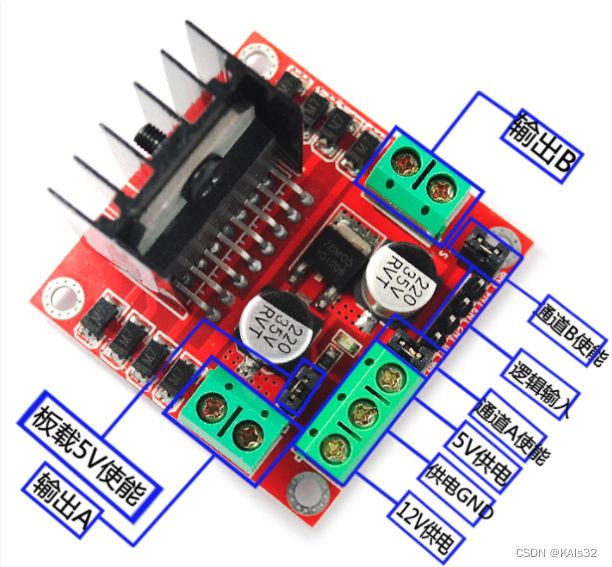
1、我们先看看电机驱动如何供电:
我们只需要在12V供电处接上7-12V电压,供电GND处与单片机共地即可,5V供电处会输出一个5V的电压,可以用于给单片机供电,做小车时最常用的就是这种方式。使用这种方式时,板载5V使能不用管。
2、输出A和输出B:
顾名思义,输出A和输出B是可以给电机输出电压的,将电机的两端分别接上输出A或者输出B即可。所以这个电机驱动可以同时驱动两个电机。
3、通道使能:
①PWM调速
如果你想用PWM调速,那就把通道使能脚(通道使能引脚是下面那个引脚,上面的引脚就是固定的高电平引脚)接入单片机的PWM波输出脚。ENA控制输出A,ENB控制输出B。
②非PWM调速
不用PWM调速,就单纯想让电机转动,就给使能脚一个高电平即可,可以通过跳线帽将其与高电平输出脚相连,如果给使能脚低电平的话,电机将无法转动。
4、逻辑输入:
逻辑输入一共有4个引脚:IN1、IN2、IN3、IN4,这四个引脚是用来控制电机状态的(正转、反转以及制动)其中IN1和IN2是控制输出A的,IN3和IN4是控制输出B的,接线方面直接将四个逻辑输入引脚接上单片机的IO口即可。
可以根据下面的表格设置四个逻辑输入引脚来确定电机状态。
| ENA和ENB | IN1(或IN3) | IN2(或IN4) | 电机状态 |
| PWM输出或0 | X | X | 停止 |
| PWM输出或1 | 0 | 0 | 制动 |
| PWM输出或1 | 0 | 1 | 正转 |
| PWM输出或1 | 1 | 0 | 反转 |
| PWM输出或1 | 1 | 1 | 制动 |
5、接线:
如果只驱动一个电机,接线方面如下:
输出A的OUT1与OUT2 ——> 电机的两端
12V供电 ——> 7-12V电源
供电GND ——> GND (与单片机共地)
ENA ——> 单片机IO口 (可自己定义,需要具备PWM功能的IO口)
IN1、IN2 ——> 单片机IO口 (可自己定义)
如果要驱动两个电机,同理即可
三、代码记录
以下是驱动两个电机的代码
l298n.h
头文件定义逻辑输入的引脚对应的IO口,以及电机驱动函数、PWM控制占空比调速的相关函数
#ifndef __L1298N_H
#define __L1298N_H
#include "sys.h"
#define Ina PAout(0)
#define Inb PAout(1)
#define Inc PAout(4)
#define Ind PAout(5)
void qianjin(void);
void houtui(void);
void stop(void);
void TIM3_PWM_Init(u16 arr,u16 psc);
#endif
l298n.c
这个代码的转速是通过PWM控制的
#include "timer.h"
#include "l298n.h"
#include "stm32f10x_tim.h"
#include "stm32f10x_rcc.h"
void TIM3_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_ResetBits(GPIOA,GPIO_Pin_0);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_ResetBits(GPIOA,GPIO_Pin_1);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_ResetBits(GPIOA,GPIO_Pin_4);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_ResetBits(GPIOA,GPIO_Pin_5);
TIM_TimeBaseStructure.TIM_Period = arr;
TIM_TimeBaseStructure.TIM_Prescaler =psc;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_Cmd(TIM3, ENABLE);
}
void qianjin()
{
Ina=1;
Inb=0;
Inc=1;
Ind=0;
TIM_SetCompare2(TIM3,1); //PWM调速,值越小,速度越大
TIM_SetCompare1(TIM3,1); //PWM调速,值越小,速度越大
}
void houtui()
{
Ina=0;
Inb=1;
Inc=0;
Ind=1;
TIM_SetCompare2(TIM3,1); //PWM调速,值越小,速度越大
TIM_SetCompare1(TIM3,1); //PWM调速,值越小,速度越大
}
void stop(void)
{
Ina=0;
Inb=0;
Inc=0;
Ind=0;
}main.c
#include "delay.h"
#include "usart.h"
#include "l298n.h"
int main(void)
{
delay_init();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
uart_init(115200);
TIM3_PWM_Init(999,0);
while(1)
{
qianjin();
delay_ms(3000);
houtui();
delay_ms(3000);
}
}