基础内容参考:https://www.cnblogs.com/eternalmoonbeam/p/10753149.html
V-REP客户端设置:
在V-REP场景文件中需要添加三个实体,包括两个形状和一个关节。
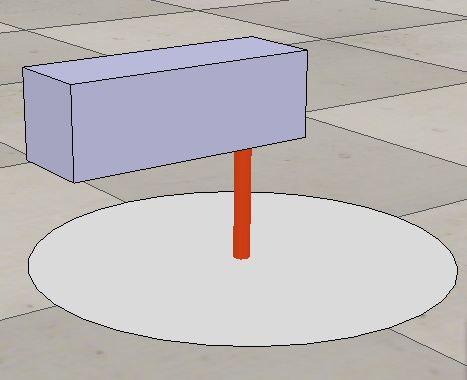
关于实体的知识在User Manual - Entities - Scenes objects。
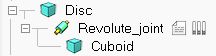
关节用的是旋转型Revolute_joint,注意三个实体间的继承关系,直接用鼠标在左侧实体列表拖动就可以添加为子对象了。
在添加之后要设置一下旋转关节的一些属性,双击它的图标:
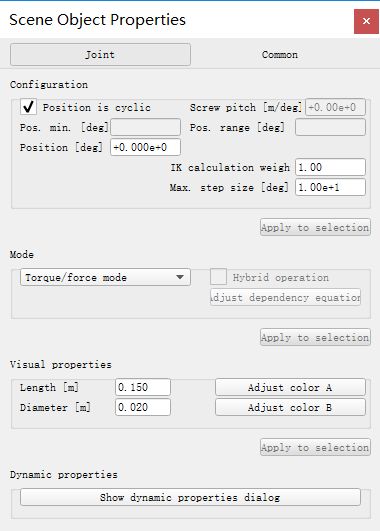
点击下方的“Show dynamic properties dialog”:
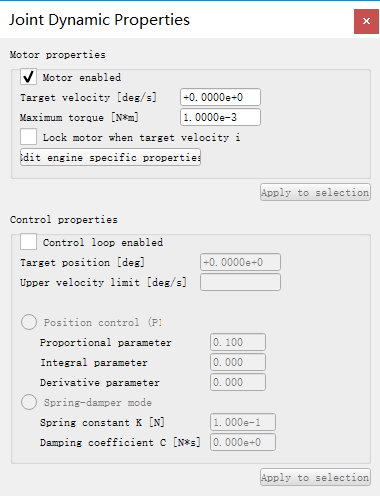
这里重点是设置“Maximum torque”,这个属性决定了旋转加速度;
最后不要忘记添加脚本并设置端口号。
C++代码:
#include#include"extApi.h" void main() { using namespace std; int Port = 20172; int clientID = simxStart("127.0.0.1", Port, 1, 1, 1000, 5); cout << "client ID: " << clientID << endl; if (clientID != -1) { cout << "V-rep connected." << endl; simxInt Revolute_joint;//设置一个变量存储关节句柄 if (simxGetObjectHandle(clientID, "Revolute_joint", &Revolute_joint, simx_opmode_blocking) == simx_return_ok)//获得关节句柄,若成功 { // here we have the joint handle in variable jointHandle! cout << "Successfully got joint handle." << endl; simxFloat tar_velo = 0.5;//设置一个变量存储关节目标转速 if (simxSetJointTargetVelocity(clientID, Revolute_joint, tar_velo, simx_opmode_blocking) == simx_return_ok)//设置关节目标转速 cout << "target velocity: " << tar_velo << endl; else cout << "angle set failed." << endl; } else cout << "Geting object handle failed." << endl; } else { cout << "V-rep can't be connected." << endl; } simxFinish(clientID); cin.get(); return; }
代码说明:
这种判断语句的风格来自手册中的Writing code in and around V-REP - V-REP API framework - Remote API - Remote API modus operandi。
首先需要获得关节的句柄,然后是设定关节转速,注意默认是弧度制。
在Remote API function list (by category)中可以查找各种功能函数,找到Joint object functionality:

所有关节控制的功能函数都在这里。这次只是实现了简单的加速转动,操作方法仍然是,先运行场景仿真然后启动C++控制台程序。
效果:
长方体开始匀加速转动,一段时间后匀速转动。即使退出C++程序,其也将继续转动。事实上,C++程序所起到的作用就是修改了实体参数。