Pytorch版DCGAN图像生成技术
参考:
https://github.com/devnag/pytorch-generative-adversarial-networks/blob/master/gan_pytorch.py
https://blog.csdn.net/sunqiande88/article/details/80219842
https://blog.csdn.net/xiaoxifei/article/details/87797935
目录结构:
数据集下载:链接: https://pan.baidu.com/s/1uUl8QQcxfBkFrX3L-_Yuxg 提取码: gef6
两个文件:train.py, model.py
model.py
import torch.nn as nn
# 定义生成器网络G
class NetG(nn.Module):
def __init__(self, ngf, nz):
super(NetG, self).__init__()
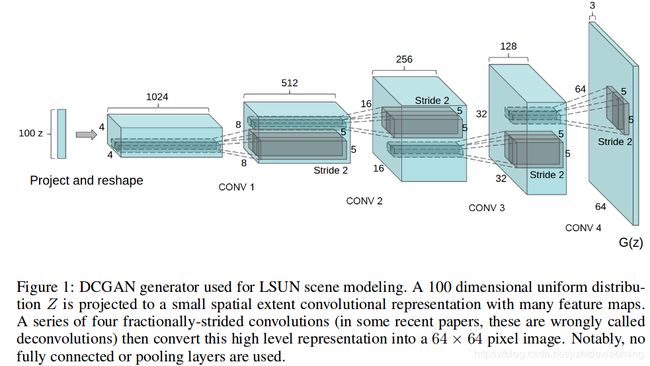
# layer1输入的是一个100x1x1的随机噪声, 输出尺寸(ngf*8)x4x4
self.layer1 = nn.Sequential(
nn.ConvTranspose2d(nz, ngf * 8, kernel_size=4, stride=1, padding=0, bias=False),
nn.BatchNorm2d(ngf * 8),
nn.ReLU(inplace=True)
)
# layer2输出尺寸(ngf*4)x8x8
self.layer2 = nn.Sequential(
nn.ConvTranspose2d(ngf * 8, ngf * 4, 4, 2, 1, bias=False),
nn.BatchNorm2d(ngf * 4),
nn.ReLU(inplace=True)
) # layer3输出尺寸(ngf*2)x16x16
self.layer3 = nn.Sequential(
nn.ConvTranspose2d(ngf * 4, ngf * 2, 4, 2, 1, bias=False),
nn.BatchNorm2d(ngf * 2),
nn.ReLU(inplace=True)
)
# layer4输出尺寸(ngf)x32x32
self.layer4 = nn.Sequential(
nn.ConvTranspose2d(ngf * 2, ngf, 4, 2, 1, bias=False),
nn.BatchNorm2d(ngf),
nn.ReLU(inplace=True)
)
# layer5输出尺寸 3x96x96
self.layer5 = nn.Sequential(
nn.ConvTranspose2d(ngf, 3, 5, 3, 1, bias=False),
nn.Tanh()
)
# 定义NetG的前向传播
def forward(self, x):
out = self.layer1(x)
out = self.layer2(out)
out = self.layer3(out)
out = self.layer4(out)
out = self.layer5(out)
return out
# 定义鉴别器网络D
class NetD(nn.Module):
def __init__(self, ndf):
super(NetD, self).__init__() # 对继承自父类的属性进行初始化
# layer1 输入 3 x 96 x 96, 输出 (ndf) x 32 x 32
self.layer1 = nn.Sequential(
nn.Conv2d(3, ndf, kernel_size=5, stride=3, padding=1, bias=False),
nn.BatchNorm2d(ndf),
nn.LeakyReLU(0.2, inplace=True)
)
# layer2 输出 (ndf*2) x 16 x 16
self.layer2 = nn.Sequential(
nn.Conv2d(ndf, ndf * 2, 4, 2, 1, bias=False),
nn.BatchNorm2d(ndf * 2),
nn.LeakyReLU(0.2, inplace=True)
)
# layer3 输出 (ndf*4) x 8 x 8
self.layer3 = nn.Sequential(
nn.Conv2d(ndf * 2, ndf * 4, 4, 2, 1, bias=False),
nn.BatchNorm2d(ndf * 4),
nn.LeakyReLU(0.2, inplace=True)
)
# layer4 输出 (ndf*8) x 4 x 4
self.layer4 = nn.Sequential(
nn.Conv2d(ndf * 4, ndf * 8, 4, 2, 1, bias=False),
nn.BatchNorm2d(ndf * 8),
nn.LeakyReLU(0.2, inplace=True)
)
# layer5 输出一个数(概率)
self.layer5 = nn.Sequential(
nn.Conv2d(ndf * 8, 1, 4, 1, 0, bias=False),
nn.Sigmoid() # 也是一个激活函数,二分类问题中,是真是假
# sigmoid可以班实数映射到【0,1】,作为概率值,
# 多分类用softmax函数
)
# 定义NetD的前向传播
def forward(self,x):
out = self.layer1(x)
out = self.layer2(out)
out = self.layer3(out)
out = self.layer4(out)
out = self.layer5(out)
return out
train.py
import argparse
import torch
import torchvision
import torchvision.utils as vutils
import torch.nn as nn
from torch.autograd import Variable
from model import NetD, NetG
parser = argparse.ArgumentParser()
parser.add_argument('--batchSize', type=int, default=64)
parser.add_argument('--imageSize', type=int, default=96)
parser.add_argument('--nz', type=int, default=100, help='size of the latent z vector')
parser.add_argument('--ngf', type=int, default=64)
parser.add_argument('--ndf', type=int, default=64)
parser.add_argument('--epoch', type=int, default=25, help='number of epochs to train for')
parser.add_argument('--lr', type=float, default=0.0002, help='learning rate, default=0.0002')
parser.add_argument('--beta1', type=float, default=0.5, help='beta1 for adam. default=0.5')
parser.add_argument('--data_path', default='data/', help='folder to train data')
parser.add_argument('--outf', default='imgs/', help='folder to output images and model checkpoints')
opt = parser.parse_args()
# 定义是否使用GPU
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# 图像读入与预处理
transforms = torchvision.transforms.Compose([
torchvision.transforms.Scale(opt.imageSize),
torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)), ])
dataset = torchvision.datasets.ImageFolder(opt.data_path, transform=transforms)
dataloader = torch.utils.data.DataLoader(
dataset=dataset,
batch_size=opt.batchSize,
shuffle=True,
drop_last=True,
)
netG = NetG(opt.ngf, opt.nz).to(device)
netD = NetD(opt.ndf).to(device)
criterion = nn.BCELoss()
optimizerG = torch.optim.Adam(netG.parameters(), lr=opt.lr, betas=(opt.beta1, 0.999))
optimizerD = torch.optim.Adam(netD.parameters(), lr=opt.lr, betas=(opt.beta1, 0.999))
for epoch in range(1, opt.epoch + 1):
for i, (imgs, _) in enumerate(dataloader): # 每次epoch,遍历所有图片,共800个batch
# 1,固定生成器G,训练鉴别器D
real_label = Variable(torch.ones(opt.batchSize)).cuda()
fake_label = Variable(torch.zeros(opt.batchSize)).cuda()
netD.zero_grad()
# 让D尽可能的把真图片判别为1
real_imgs = Variable(imgs.to(device))
real_output = netD(real_imgs)
d_real_loss = criterion(real_output, real_label)
real_scores = real_output
# d_real_loss.backward() # compute/store gradients, but don't change params
# 让D尽可能把假图片判别为0
noise = Variable(torch.randn(opt.batchSize, opt.nz, 1, 1)).to(device)
noise = noise.to(device)
fake_imgs = netG(noise) # 生成假图
fake_output = netD(fake_imgs.detach()) # 避免梯度传到G,因为G不用更新, detach分离
d_fake_loss = criterion(fake_output, fake_label)
fake_scores = fake_output
# d_fake_loss.backward()
d_total_loss = d_fake_loss + d_real_loss
netG.zero_grad()
d_total_loss.backward() # 反向传播,计算梯度
optimizerD.step() # Only optimizes D's parameters; changes based on stored gradients from backward()
# 2,固定鉴别器D,训练生成器G
fake_output = netD(fake_imgs)
g_fake_loss = criterion(fake_output, real_label)
g_fake_loss.backward() # 反向传播,计算梯度
optimizerG.step() # 梯度信息来更新网络的参数,Only optimizes G's parameters
print('[%d/%d][%d/%d] real_scores: %.3f fake_scores %.3f'
% (epoch, opt.epoch, i, len(dataloader), real_scores.data.mean(), fake_scores.data.mean()))
if i % 100 == 0:
vutils.save_image(fake_imgs.data,
'%s/fake_samples_epoch_%03d_batch_i_%03d.png' % (opt.outf, epoch, i),
normalize=True)
# vutils.save_image(fake.data,
# '%s/fake_samples_epoch_%03d.png' % (opt.outf, epoch),
# normalize=True)
torch.save(netG.state_dict(), '%s/netG_%03d.pth' % (opt.outf, epoch))
torch.save(netD.state_dict(), '%s/netD_%03d.pth' % (opt.outf, epoch))
注意:训练D的时候,使用下面的代码,通过分离(detach)G网络生成的fake_imgs,从而固定住G网络
fake_output = netD(fake_imgs.detach())训练生成器的时候,虽然fake_ouput是讲过D网络判别,然后g_fake_loss反向传播计算梯度,但是通过下面代码只更新了G网络的参数:
# optimizerG = torch.optim.Adam(netG.parameters(), lr=opt.lr, betas=(opt.beta1, 0.999))
optimizerG.step() # Only optimizes G's parameters效果
epoch1:

epoch13:
