图像处理24:图像梯度
梯度简单来说就是求导。 OpenCV 提供了三种不同的梯度滤波器,或者说高通滤波器:Sobel, Scharr 和 Laplacian。Sobel,Scharr 其实就是求一阶或二阶导数。Scharr 是对 Sobel(使用小的卷积核求解求解梯度角度时)的优化。Laplacian 是求二阶导数。
1、Sobel 算子和 Scharr 算子
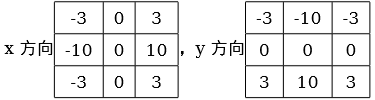
Sobel 算子是高斯平滑与微分操作的和,所以它的抗噪声能力很好。 你可以设定求导的方向(xorder 或 yorder)。还可以设定使用的卷积核的大小(ksize)。如果 ksize=-1,会使用 3x3 的 Scharr 滤波器,它的的效果要 比 3x3 的 Sobel 滤波器好(而且速度相同,所以在使用 3x3 滤波器时应该尽量使用 Scharr 滤波器)。3x3 的 Scharr 滤波器卷积核如下:
2、Laplacian 算子
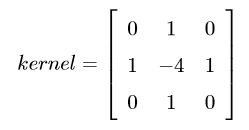
拉普拉斯算子可以使用二阶导数的形式定义,可假设其离散实现类似于二阶 Sobel 导数,事实上,OpenCV 在计算拉普拉斯算子时直接调用 Sobel 算 子。计算公式如下:

拉普拉斯滤波器使用的卷积核:
#coding:utf-8
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('F:/qipan.png',0)
#cv2.CV_64F输出的图像深度(数据类型),可以使用-1,与原图像保持一致
laplacian = cv2.Laplacian(img,cv2.CV_64F)
sobelx = cv2.Sobel(img, cv2.CV_64F, 1, 0, ksize=5)#参数0,1是在x方向上求一阶导,最大可以求2阶导数
sobely = cv2.Sobel(img, cv2.CV_64F, 0, 1, ksize=5)#参数1,0是在y方向上求一阶导,最大可以求2阶导数
name = ['Origianl','Laplacian','Sobel X','Sobel Y']
showPic = [img,laplacian,sobelx,sobely]
for i in xrange(4):
plt.subplot(2, 2, i+1), plt.imshow(showPic[i], cmap='gray')
plt.title(name[i]), plt.xticks([]), plt.yticks([])
plt.show()
重要:为什么使用cv2.CV_64F呢?一个从黑到白的边界的导数是整数,而一个从白到黑的边界点导数却是负数。如果原图像的深度是 np.int8 时,所有的负值都会被截断变成 0,换句话说就是把边界丢失掉。 所以如果这两种边界都想检测到,最好的的办法就是将输出的数据类型设置的更高,比如 cv2.CV_16S,cv2.CV_64F等。取绝对值然后再把它转回到 cv2.CV_8U。下面输出图片的深度不同造成的不同效果。
#coding:utf-8
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('F:/hand.png',0)
sobelx8u = cv2.Sobel(img,cv2.CV_8U, 1, 0, ksize=5)
sobelx64f = cv2.Sobel(img, cv2.CV_64F,1,0,ksize=5)
abs_sobel64f = np.absolute(sobelx64f)
sobel_8u = np.uint8(abs_sobel64f)
name = ['Origianl','Sobel CV_8U','Sobel abs(CV_64F)']
showPic = [img,sobelx8u,sobel_8u]
for i in xrange(3):
plt.subplot(1, 3, i+1), plt.imshow(showPic[i], cmap='gray')
plt.title(name[i]), plt.xticks([]), plt.yticks([])
plt.show()