A*寻路算法(更新cocos2dx版本)
(由于期间LOL战斗之夜以及一些事情,没来得及填坑A*算法orz,所以今天开始好好学习)
参考了:http://blog.csdn.net/makecontral/article/details/38311943
http://blog.csdn.net/zgwangbo/article/details/52078338
两位博主都写得挺好的,容易理解。
两篇的区别:①第一篇为理论基础与一些概念,通俗易懂,是博主翻译外国人的文章,翻译得很好,第二篇则是用简洁的语言与图形说明A*算法以及一些关于h值的取法,还有核心的java实现代码。
②第一篇所用的是8邻域扩展节点,第二篇则是4邻域。
③第一篇blog的有些数据没显示完全..感觉可能是从哪复制的,不过看到后面的步骤,也就了解了这个算法的实现过程。
正文:
说到A*算法,就不得不说一下BFS(广度优先搜索),BFS是A*算法的一种特例,在A*算法中,有这样一个函数式子,f=g+h,而BFS则是 h=0的情况,因为A*算法是一种寻路算法,可以理解把f理解为距离,而g为从起始点s到某一点m的距离,而h则为m到终点e的距离,那为什么要这么分呢?因为从要考虑到有障碍物,即不可通过的区域或者是给出一个预测值,达到启发式搜索的目的。
(启发式搜索:启发式搜索就是在状态空间中的搜索对每一个搜索的位置进行评估,得到最好的位置,再从这个位置进行搜索直到目标。这样可以省略大量无畏的搜索路径,提到了效率。在启发式搜索中,对位置的估价是十分重要的。采用了不同的估价可以有不同的效果)
常见的计算h的公式有:
1、曼哈顿距离:横向距离+纵向的距离;
2、欧式距离:两点间的直线距离sqrt((x1-x2)^2 + (y1-y2)^2)
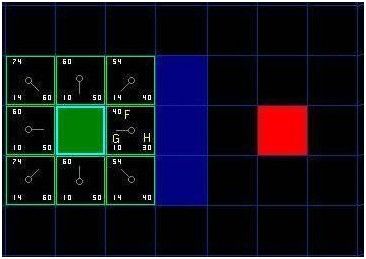
图中的F、G、H的关系就如同上面所说的f=g+h,当我看到这里的时候(第一篇blog),我是这样想的,用8邻域遍历周边格子,然后把它们都存放起来(删除起始节点),然后选出最小的F值,进行8邻域扩展,然后再把节点都存放起来(若是周边的节点是不可达节点,即是图中的蓝色节点,则不存放,且每次扩展则把扩展孩子节点的父 节点删除)重复操作,则应该大概也许能找到最优的路径。。。
————————————————–第五次更新,更新代码部分(2018.7.4)——————————————————
(此次更新的第二段代码为完善后的寻路算法,附加推算的过程图,之前没看完文章,按照自己的想法瞎写了很久没找出最短路径,阅读完之后,发现parent指针的重要性,h的计算是用两点之间的距离公式计算,取消了std::priority_queue(优先队列)的使用,使用std::list运用列表,对应的写一些取值和赋值操作,因为后面更新g值的时候要更新f值,更新的时候就要更新队列,但是std优先队列无法自由的取出值,对值进行更新,因为没想到怎么写一个好的方法去更新,只想到了把所有值取出来然后放进去的蠢方法,就放弃使用优先队列,转向选择了list容器)
在看开头介绍的两篇博客(A*)的时候,对更新g值不太理解,打算自己先写写代码实现以下,寻路的目的是达到了(应该达到了吧),但是有些节点应该进入队列的却没进,先贴代码,以及结果吧。
代码的思路是按我上面的想法写的,应该算是求曼哈顿距离来寻路,有个小问题就是,我存放路径和显示拜访过路径的地方有问题,可以从下面的结果图看出从起点(4)到终点(5)的过程中,几乎都是1或者说都是1。
之前的代码未找出最优路径代码(使用std::priority_queue,无法对值更新).
算法的大概步骤:
1、刚开始,通过开始的节点,通过BFS扩展节点,然后把节点存入列表或者最小堆中。
2、取出列表中f=g+h值最小的节点,然后将该点从列表或最小堆中删除,然后通过该节点扩展节点。
3、在扩展的过程中,若扩展节点扩展出来的点已经在列表或最小堆中,判断列表中的g值与扩展出来的节点g值大小,若列表中g值大于该点的g值,则更新列表中节点的g值与f值,并将该节点的parent指针指向扩展节点。
4、重复2-3步骤操作,直到找到end点或者列表为空的时候,中断程序。
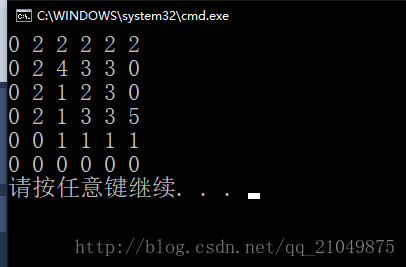
上面的图是以前以前写的操作台结果,这次更新的是cocos2dx的图像版本,黑点为起始点,红点为终点,运行的时候绿点会慢慢走向红点。

代码部分:
//HelloWorldScene.h
#ifndef __HELLOWORLD_SCENE_H__
#define __HELLOWORLD_SCENE_H__
#include "cocos2d.h"
#include"proj.win32\route.h"
class HelloWorld : public cocos2d::Scene
{
public:
static cocos2d::Scene* createScene();
virtual bool init();
void update(float dt);
// a selector callback
// implement the "static create()" method manually
CREATE_FUNC(HelloWorld);
public:
std::stack//HelloWorldScene.cpp
#include "HelloWorldScene.h"
USING_NS_CC;
Scene* HelloWorld::createScene()
{
return HelloWorld::create();
}
// on "init" you need to initialize your instance
bool HelloWorld::init()
{
int _map[MAP_W][MAP_H] = {
{ 0,4,3,0,0,0 },
{ 0,0,0,0,0,0 },
{ 0,3,3,3,0,3 },
{ 0,0,0,3,0,3 },
{ 3,0,0,0,0,0 },
{ 0,0,3,0,3,0 },
{ 0,0,0,0,0,0 },
{ 0,3,3,5,0,3 },
};
std::map<int, Color4B> mode;
mode[0] = Color4B::WHITE;
mode[3] = Color4B::BLUE;
mode[4] = Color4B::BLACK;
mode[5] = Color4B::RED;
for (int i = 0; i < MAP_W; i++) {
for (int j = 0; j < MAP_H; j++) {
int tmp = _map[i][j];
LayerColor *layer_block = nullptr;
layer_block = LayerColor::create(mode[tmp], 128, 128);
this->addChild(layer_block);
layer_block->setPosition(i*128, j*128);
}
}
route=Astar(MyVec2(0, 1), MyVec2(7, 3), _map);
schedule(schedule_selector(HelloWorld::update), 1.0f, kRepeatForever, 0);
return true;
}
void HelloWorld::update(float dt)
{
if (!route.empty()) {
auto tmp = route.top();
route.pop();
auto layer_block = LayerColor::create(Color4B::GREEN, 128, 128);
this->addChild(layer_block);
layer_block->setPosition(tmp.x * 128, tmp.y * 128);
}
}//重载Vec2为A*算法算权值做准备
//route.h
#pragma once
#include//route.cpp
//实现A*算法
#include"route.h"
const MyVec2 connects[] = { MyVec2(0,1),MyVec2(1,0),MyVec2(0,-1),MyVec2(-1,0) };
MyVec2* findPoint(std::list