动态规划理论学习
文章目录
- 1. 理论总结
- 1.1 “一个模型”
- 1.2 “三个特征”
- 1.2.1 最优子结构
- 1.2.2 无后效性
- 1.2.3 重复子问题
- 2. 实例剖析
- 2.1 问题描述
- 2.2 两种DP解题思路
- 2.2.1 状态转移表
- 2.2.2 状态转移方程
- 3. 四种算法思想比较
1. 理论总结
动态规划理论总结为“一个模型、三个特征”。
1.1 “一个模型”
- 它指的是动态规划适合解决的问题的模型。我把这个模型定义为“多阶段决策最优解模型"。
- 一般是用动态规划来解决最优问题。
- 解决问题的过程,需要经历多个决策阶段。每个决策阶段对应着一组状态。
- 然后我们寻找一组决策序列,经过这组决策序列,能够产生最终期望求解的最优值。
1.2 “三个特征”
1.2.1 最优子结构
- 问题的最优解包含子问题的最优解。
- 反过来说就是,可以通过子问题的最优解,推导出问题的最优解。后面阶段的状态可以通过前面阶段的状态推导出来。
1.2.2 无后效性
- 在推导后面阶段的状态时,我们只关心前面阶段的状态值,不关心这个状态是怎么一步一步推导出来的。
- 某阶段状态一旦确定,就不受之后阶段的决策影响。只要满足前面提到的动态规划问题模型,其实基本上都会满足无后效性。
1.2.3 重复子问题
- 不同的决策序列,到达某个相同的阶段时,可能会产生重复的状态。
2. 实例剖析
2.1 问题描述
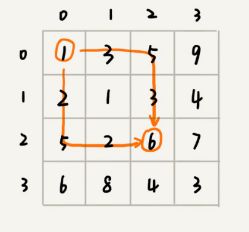
一个n乘以n的矩阵w[n][n]。存储的都是正整数。棋子起始位置在左上角,终止位置在右下角。每次只能向右或者向下移动一位。把每条路径经过的数字加起来看作路径的长度。最短路径长度是多少?

- 是否符合“一个模型”
- 从(0,0)走到(n-1,n-1),总共要走 2n-1 步,对应着 2n-1 个阶段。
- 每个阶段都有向右或向下走两种决策,并且每个阶段都会对应一个状态集合。
- 我们把状态定义为 min_dist(i,j),其中 i 表示行,j 表示列。min_dist 表达式的值表示从(0,0)到达(i,j)的最短路径长度。
- 所以,这个问题是一个多阶段决策最优解问题,符合动态规划的模型。

- 是否符合“三个特征”
-
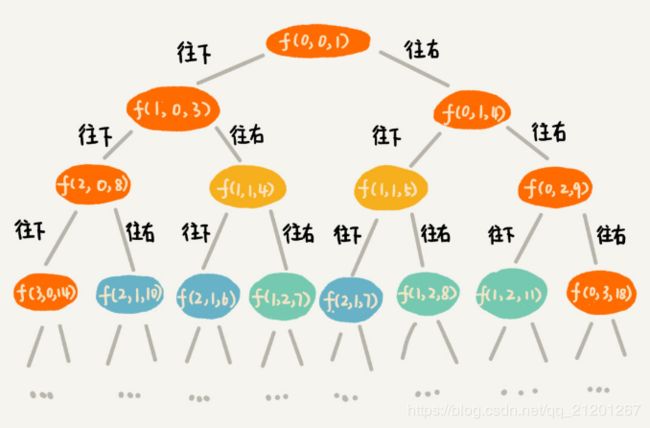
我们可以用回溯算法来解决这个问题。自己写一下代码,画一下递归树,就会发现,递归树中有重复的节点。重复的节点表示,从左上角到节点对应的位置,有多种路线,这也能说明这个问题中存在重复子问题。
下面给出回溯解法
/**
* @description: dp课第二节,案例回溯法求解
* @author: michael ming
* @date: 2019/7/19 19:55
* @modified by:
*/
#include 
-
走到(i,j)这个位置,只能通过(i-1,j),(i,j-1)这两个位置移动过来,也就是,想要计算(i,j)位置对应的状态,只需关心(i-1,j),(i,j-1)两个位置对应的状态,并不关心棋子是通过什么样的路线到达这两个位置。而且,我们仅仅允许往下和往右移动,不允许后退,所以,前面阶段的状态确定后,不会被后面的决策所改变,所以,这个问题符合“无后效性”这一特征。
-
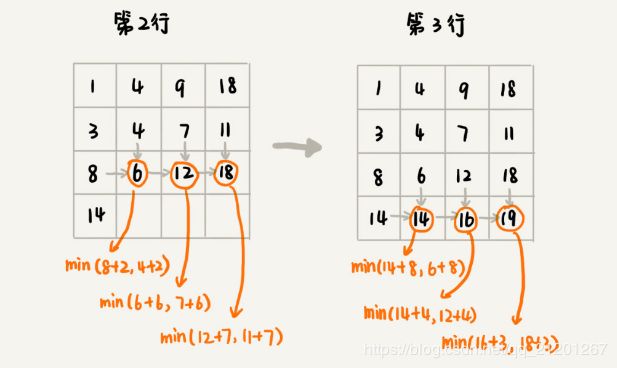
把从起始位置(0,0)到(i,j)的最小路径,记作函数min_dist(i,j)。因为只能往右或往下移动,所以只有可能从(i,j-1)或(i-1,j)两个位置到达(i,j)。到达(i,j)的最短路径肯定包含到达这两个位置的最短路径之一。换句话说就是,min_dist(i,j)可以通过min_dist(i,j-1)和min_dist(i-1,j)两个状态推导出来。这就说明,这个问题符合“最优子结构”。
min_dist(i, j) = w[i][j] + min{min_dist(i, j-1), min_dist(i-1, j)}
2.2 两种DP解题思路
2.2.1 状态转移表
-
一般能用动态规划的,都可以使用回溯暴力搜索。所以,可以先用简单的回溯算法解决,然后定义状态,对应画出递归树。
-
从递归树中,我们很容易可以看出来,是否存在重复子问题,以及重复子问题是如何产生的。以此来寻找规律,看是否能用动态规划解决。
-
找到重复子问题之后,有两种处理思路,第一种是回溯加“备忘录”的方法,来避免重复子问题。从效率上来讲,这跟动态规划的解决思路没有差别。
-
第二种是使用动态规划,状态转移表法。
-
先画出一个状态表,一般是二维的,可以把它想象成二维数组。其中,每个状态包含三个变量,行、列、数组值。
-
根据决策的先后,从前往后,根据递推关系,分阶段填充状态表中的每个状态。最后,将这个递推填表的过程,翻译成代码,就是动态规划代码。
-
尽管大部分状态表都是二维的,如果问题的状态比较复杂,需要很多变量来表示,那对应的状态表就是高维的,这个时候,不适合用状态转移表法来解决了。一方面高维状态转移表不好画图表示,另一方面人脑不擅长思考高维的东西。
-
根据回溯代码画出递归树,递归树中,一个状态(节点)包含三个变量(i,j,dist),其中i,j表示行和列,dist表示从起点到达点(i,j)的路径长度。图中看出,尽管(i,j,dist)不存在重复,但是(i,j)重复的有很多。对(i,j)重复的节点,我们只选择 dist最小的节点,继续递归求解,其他节点舍弃。
-
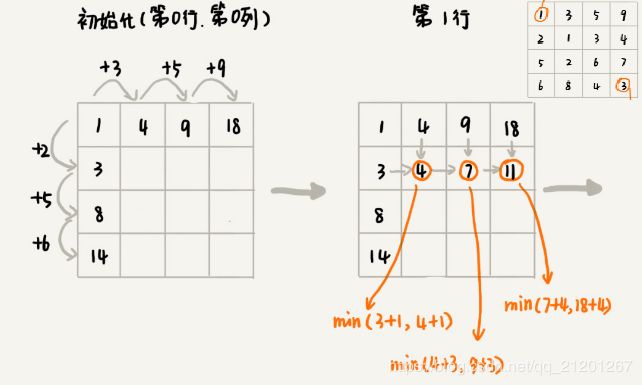
画出二维状态表,表中行、列表示棋子位置,表中数值表示从起点到这个位置的最短路径。我们按照决策过程,将状态表填好。为了方便,我们按行来进行依次填充。
dp状态表法代码如下:
/** * @description: * @author: michael ming * @date: 2019/7/19 23:30 * @modified by: */ #include#include #define N 4//地图大小 using namespace std; void printShortestWay(int (*map)[N], int (*states)[N]) { stack<int> path; path.push(map[N-1][N-1]);//终点 for(int i = N-1,j = N-1; j != 0 && i != 0; ) { if(states[i][j]-map[i][j] == states[i-1][j]) path.push(map[--i][j]);//从上面过来的 else path.push(map[i][--j]);//从左边过来的 } path.push(map[0][0]);//起点 cout << "走过的点的距离分别是:" << endl; while(!path.empty())//栈逆序弹出路径 { cout << path.top() << " "; path.pop(); } } void step_dp(int (*map)[N]) { int (*states)[N] = new int [N][N]; int i, j, sum = 0; for(j = 0; j < N; ++j)//初始化第一行状态 { sum += map[0][j]; states[0][j] = sum; } sum = 0; for(i = 0; i < N; ++i)//初始化第一列状态 { sum += map[i][0]; states[i][0] = sum; } for(i = 1; i < N; ++i)//填写状态表 for(j = 1; j < N; ++j) states[i][j] = map[i][j]+min(states[i][j-1],states[i-1][j]); cout << "最短路径是:" << states[N-1][N-1] << endl; printShortestWay(map,states); delete [] states; return; } int main() { int map[N][N] = {1,3,5,9,2,1,3,4,5,2,6,7,6,8,4,3}; step_dp(map); return 0; } 
2.2.2 状态转移方程
-
状态转移方程法有点类似递归。根据最优子结构,写出递归公式,也就是状态转移方程。
-
有两种代码实现方法,一种是递归加“备忘录”,另一种是迭代递推。
min_dist(i, j) = w[i][j] + min{min_dist(i, j-1), min_dist(i-1, j)} -
状态转移方程是解DP的关键。如果能写出状态转移方程,那DP问题基本上就解决一大半了。但是很多DP问题的状态本身就不好定义,状态转移方程也就更不好想到。
下面用递归加“备忘录”的方式,将状态转移方程翻译成代码。对于另一种实现方式,跟状态转移表法的代码实现是一样的,只是思路不同。
/**
* @description: dp 状态方程 递归
* @author: michael ming
* @date: 2019/7/20 9:35
* @modified by:
*/
#include 
强调一点,不是每个问题都同时适合这两种解题思路。有的问题可能用状态表更清晰,而有的问题可能用状态方程思路更清晰。
3. 四种算法思想比较
到现在为止,已经学习了四种算法思想,贪心、分治、回溯、动态规划。
- 贪心、回溯、动态规划,都可以抽象成多阶段决策最优解模型
- 而分治解决的问题尽管大部分也是最优解问题,但是,大部分都不能抽象成多阶段决策模型
| 算法 | 算法特点 |
|---|---|
| 回溯 | 穷举所有的情况,然后对比得到最优解。时间复杂度非常高,指数级,只能用来解决小规模问题。大规模问题,执行效率很低 |
| 动态规划 | 需要满足三个特征,最优子结构、无后效性和重复子问题,动态规划之所以高效,是因为回溯算法实现中存在大量的重复子问题 |
| 分治 | 要求分割成的子问题,不能有重复子问题,与动态规划正好相反 |
| 贪心 | 高效,代码简洁。可以解决的问题也有限。需要满足三个条件,最优子结构、无后效性和贪心选择性。“贪心选择性”的意思是,通过局部最优的选择,能产生全局的最优选择。每一个阶段,都选择当前看起来最优的决策,所有阶段的决策完成之后,最终由这些局部最优解构成全局最优解 |