【STM32】电源控制、低功耗模式(实例:待机模式)
STM32F1xx官方资料:
《STM32中文参考手册V10》-第4章4.3小节 低功耗模式
STM32的电源控制
STM32的电源框图
STM32的工作电压(VDD)为2.0~3.6V。通过内置的电压调节器提供所需的1.8V电源。 当主电源VDD掉电后,通过VBAT脚为实时时钟(RTC)和备份寄存器提供电源。
下面是STM32的电源框图:

注意:框图中的VDDA和VSSA必须分别联到VDD和VSS。
独立的A/D转换器供电和参考电压
为了提高转换的精确度,ADC使用一个独立的电源供电,过滤和屏蔽来自印刷电路板上的毛刺干扰。
- ADC的电源引脚为VDDA;
- 独立的电源地VSSA。
如果有VREF-引脚(根据封装而定),它必须连接到VSSA。同时,为了确保输入为低压时获得更好精度,用户可以连接一个独立的外部参考电压ADC到VREF+和VREF-脚上。在VREF+的电压范围为2.4V~VDDA。
电池备份区域
使用电池或其他电源连接到VBAT脚上,当VDD断电时,可以保存备份寄存器的内容和维持RTC的功能。
VBAT脚也为RTC、LSE振荡器和PC13至PC15供电,这保证当主要电源被切断时RTC能继续工作。切换到VBAT供电由复位模块中的掉电复位功能控制。 如果应用中没有使用外部电池,VBAT必须连接到VDD引脚上。
电压调节器
复位后调节器总是使能的。根据应用方式它以3种不同的模式工作:
- 运行模式:调节器以正常功耗模式提供1.8V电源(内核,内存和外设);
- 停止模式:调节器以低功耗模式提供1.8V电源,以保存寄存器和SRAM的内容;
- 待机模式:调节器停止供电。除了备用电路和备份域外,寄存器和SRAM的内容全部丢失。
STM32的低功耗模式
很多单片机有低功耗模式,STM32也不例外。在系统或者电源复位后,微控制器出于运行状态之下,HCLK为CPU提供时钟,内核执行代码。当CPU不需要继续运行时,可以利用多种低功耗模式来节省功耗,例如等待某个事件触发。
低功耗模式分类
STM32有三种低功耗模式:
- 睡眠模式:Cortex-M3内核停止,所有外设包括Cortex-M3核心的外设,如NVIC、系统时钟(SysTick)等仍在运行;
- 停止模式:所有时钟都已停止。
- 待机模式:1.8V内核电源关闭。
在运行模式下,可以通过下面方式降低功耗:
- 降低系统时钟:
在运行模式下,通过对预分频寄存器进行编程,可以降低任意一个系统时钟(SYSCLK、HCLK、PCLK1、PCLK2)的速度。进入睡眠模式前,也可以利用预分频器来降低外设的时钟;
- 关闭APB和AHB总线上未被使用的外设时钟:
在运行模式下,任何时候都可以通过停止为外设和内存提供时钟(HCLK和PCLKx)来减少功耗。 为了在睡眠模式下更多地减少功耗,可在执行WFI或WFE指令前关闭所有外设的时钟。 通过设置AHB外设时钟使能寄存器 (RCC_AHBENR)、APB2外设时钟使能寄存器(RCC_APB2ENR)和APB1外设时钟使能寄存器(RCC_APB1ENR)来开关各个外设模块的时钟。

睡眠模式
在睡眠模式下,Cortex-M3内核停止,所有外设包括Cortex-M3核心的外设,如NVIC、系统时钟(SysTick)等仍在运行,也就是说:所有的I/O引脚都保持它们在运行模式时的状态。
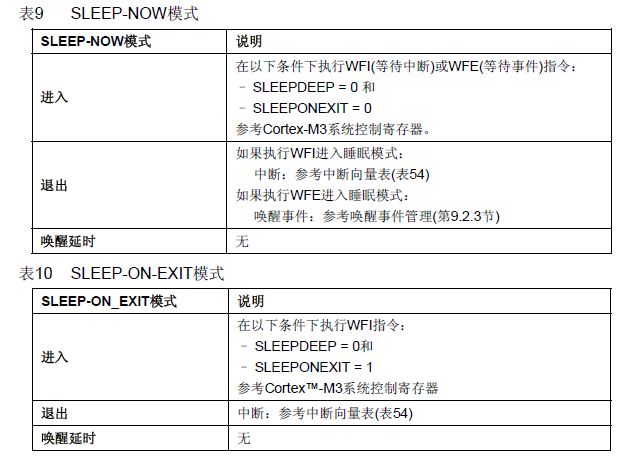
该模式唤醒所需的时间最短,因为没有时间损失在中断的进入或退出上。
停止模式
停止模式是在Cortex™-M3的深睡眠模式基础上结合了外设的时钟控制机制,在停止模式下电压调节器可运行在正常或低功耗模式。此时在1.8V供电区域的的所有时钟都被停止,但1.8V供电区域仍通电,PLL、HSI和HSE RC振荡器的功能被禁止,SRAM和寄存器内容被保留下来。
在停止模式下,所有的I/O引脚都保持它们在运行模式时的状态。

待机模式
待机模式可实现系统的最低功耗。该模式是在Cortex-M3深睡眠模式时关闭电压调节器。整个1.8V供电区域被断电。PLL、HSI和HSE振荡器也被断电。SRAM和寄存器内容丢失。只有备份的寄存器和待机电路维持供电。
在待机模式下,所有的I/O引脚处于高阻态,除了以下的引脚:
- 复位引脚(始终有效);
- 当被设置为防侵入或校准输出时的TAMPER引脚;
- 被使能的唤醒引脚。

电源控制相关配置寄存器
电源控制寄存器(PWR_CR)

作用:掉电深度睡眠位的设置(停止模式和待机模式)。
电源控制/状态寄存器(PWR_CSR)

作用:使能WKUP引脚用于待机模式唤醒、WUF唤醒标志位。
电源控制相关配置库函数
- 2个模式进入函数
void PWR_EnterSTOPMode(uint32_t PWR_Regulator, uint8_t PWR_STOPEntry);
void PWR_EnterSTANDBYMode(void);作用:前者进入停机状态,后者进入待机状态。
- 2个使能函数
void PWR_WakeUpPinCmd(FunctionalState NewState);
void PWR_BackupAccessCmd(FunctionalState NewState);作用:前者使能WK_UP引脚唤醒(正常模式下,WK_UP引脚作为普通IO口,待机模式下设置成唤醒功能),后者使能BKP后备区域访问使能。
- 2个状态位函数
FlagStatus PWR_GetFlagStatus(uint32_t PWR_FLAG);
void PWR_ClearFlag(uint32_t PWR_FLAG);作用:前者获取电源控制的状态位,后者清除相应的状态位。
- 2个内核指令函数
__WFI();
__WFE();作用:CM3内核的WFI(等待中断)、WFE(等待事件)指令(定义在:core_cm3.h)。
待机模式的一般步骤
实例要求:实现同一个引脚PA0引脚(WK_UP引脚),正常模式下,长按3秒进入待机模式;待机模式下,长按3秒待机唤醒。
- 使能电源时钟。调用函数:RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);
- 设置WK_UP引脚作为唤醒源。调用函数:PWR_WakeUpPinCmd(ENABLE);
- 进入待机模式。调用函数:void PWR_EnterSTANDBYMode(void),执行设置SLEEPDEEP位,设置PDDS位,执行WFI指令。
#define WKUP_KD PAin(0) //PA0 检测是否外部WK_UP按键按下void Sys_Standby(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE); //使能PWR外设时钟
PWR_WakeUpPinCmd(ENABLE); //使能唤醒管脚功能
PWR_EnterSTANDBYMode(); //进入待命(STANDBY)模式
}
//系统进入待机模式
void Sys_Enter_Standby(void)
{
RCC_APB2PeriphResetCmd(0X01FC,DISABLE); //复位所有IO口
Sys_Standby();
}
//检测WKUP脚的信号
//返回值1:连续按下3s以上
// 0:错误的触发
u8 Check_WKUP(void)
{
u8 t=0; //记录按下的时间
LED0=0; //亮灯DS0
while(1)
{
if(WKUP_KD)
{
t++; //已经按下了
delay_ms(30);
if(t>=100) //按下超过3秒钟
{
LED0=0; //点亮DS0
return 1; //按下3s以上了
}
}else
{
LED0=1;
return 0; //按下不足3秒
}
}
}
//中断,检测到PA0脚的一个上升沿.
//中断线0线上的中断检测
void EXTI0_IRQHandler(void)
{
EXTI_ClearITPendingBit(EXTI_Line0); // 清除LINE10上的中断标志位
if(Check_WKUP())//关机?
{
Sys_Enter_Standby();
}
}
//PA0 WKUP唤醒初始化
void WKUP_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);//使能GPIOA和复用功能时钟
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_0; //PA.0
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_IPD;//上拉输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化IO
//使用外部中断方式
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource0); //中断线0连接GPIOA.0
EXTI_InitStructure.EXTI_Line = EXTI_Line0; //设置按键所有的外部线路
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //设外外部中断模式:EXTI线路为中断请求
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising; //上升沿触发
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure); // 初始化外部中断
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; //使能按键所在的外部中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //先占优先级2级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //从优先级2级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
if(Check_WKUP()==0) Sys_Standby(); //不是开机,进入待机模式
} int main(void)
{
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
LED_Init(); //LED端口初始化
WKUP_Init(); //待机唤醒初始化
LCD_Init(); //LCD初始化
POINT_COLOR=RED;
LCD_ShowString(30,50,200,16,16,"Warship STM32");
LCD_ShowString(30,70,200,16,16,"WKUP TEST");
LCD_ShowString(30,90,200,16,16,"ATOM@ALIENTEK");
LCD_ShowString(30,110,200,16,16,"2014/1/14");
while(1)
{
LED0=!LED0;
delay_ms(250);
}
}STM32控制程序分析
WKUP_Init()函数:初始化GPIO、外部中断等准备工作。
由于WK_UP键有两个功能:正常模式下,长按3秒进入待机模式;待机模式下,长按3秒退出待机模式。
本案例中的实现是:
- 正常模式下,将WK_UP键设置成外部中断,一旦按下,进入中断处理函数,在中断处理函数中进行3秒的时间判断是否进入待机模式;
void WKUP_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);//使能GPIOA和复用功能时钟
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_0; //PA.0
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_IPD;//上拉输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化IO
//使用外部中断方式
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource0); //中断线0连接GPIOA.0
EXTI_Init(&EXTI_InitStructure); // 初始化外部中断
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
}void EXTI0_IRQHandler(void)
{
EXTI_ClearITPendingBit(EXTI_Line0); // 清除LINE10上的中断标志位
if(Check_WKUP())//关机?
{
Sys_Enter_Standby();
}
} - 待机模式下,设置WK_UP键用来退出待机模式,一旦按下,退出待机模式,重新执行main主函数,在主函数中进行3秒的时间判断,如果没有3秒,重新进入待机模式,否则继续正常执行。
void WKUP_Init(void)
{
//初始化过程
if(Check_WKUP()==0) Sys_Standby(); //不是开机,进入待机模式
}而其中进入待机模式的程序代码块,就是之前的待机模式的一般步骤:
void Sys_Standby(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE); //使能PWR外设时钟
PWR_WakeUpPinCmd(ENABLE); //使能唤醒管脚功能
PWR_EnterSTANDBYMode(); //进入待命(STANDBY)模式
}