Pytorch入门教程(七):卷积相关
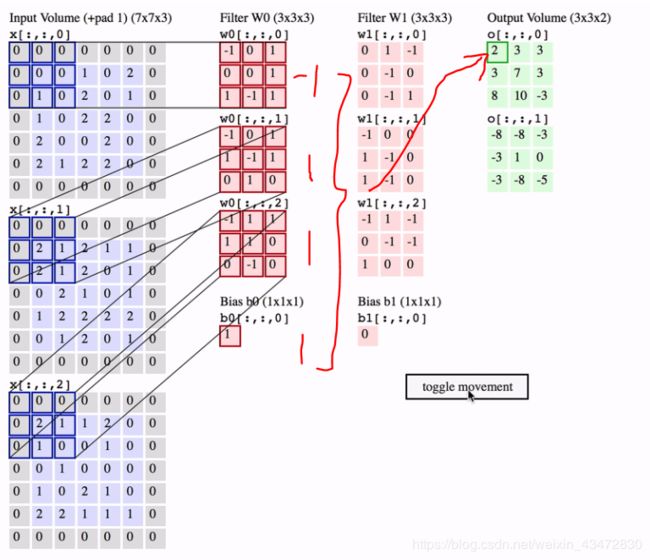
1. 卷积基本操作
图像多个通道,分别卷积,最后求和,加偏置,形成新的像素点。
import torch
import torch.nn as nn
x = torch.randn(10, 1, 28, 28) # 10张图片,1个通道,28*28大小
layer = nn.Conv2d(1, 3, kernel_size=3, stride=1, padding=0) # 1个输入通道(与所输入的图片通道相同),
# 3个卷积核(将要输出的卷积通道数),3*3大小,步长为1,不填充
out = layer(x) # 输出10张图片,3个卷积后的通道,26*26大小
print("shape", out.shape) # 输出形状
print("weight", layer.weight) # 输出权重
print("bias", layer.bias) # 偏置结果:
shape torch.Size([10, 3, 26, 26])
weight Parameter containing:
tensor([[[[ 0.0259, 0.0438, 0.1578],
[-0.2911, -0.1639, 0.1765],
[ 0.2297, -0.2030, -0.2391]]],
[[[-0.0350, -0.0117, 0.2991],
[ 0.3243, -0.2971, 0.1746],
[-0.0482, 0.1946, -0.1645]]],
[[[ 0.2764, -0.2696, -0.3317],
[ 0.1563, -0.1096, 0.1644],
[-0.0760, 0.2367, 0.2039]]]], requires_grad=True)
bias Parameter containing:
tensor([ 0.3205, 0.0316, -0.2219], requires_grad=True)
2. 池化层

x = torch.randn(10, 3, 28, 28) # 10张图片,3个通道,28*28大小
layer = nn.MaxPool2d(2, stride=2) # 最大池化,2*2大小池化层,步长为2
out = layer(x)
print(out.shape) # torch.Size([10, 3, 14, 14])大小变为原来的一半3. 上采样

import torch
import torch.nn as nn
import torch.nn.functional as F
x = torch.randn(10, 3, 14, 14) # 10张图片,3个通道,14*14大小
out = F.interpolate(x, scale_factor=2, mode="nearest") # 插值上采样,放大2倍,临近插值
print(out.shape) # torch.Size([10, 3, 28, 28])4 Batch Norm 批量归一化
数据分布对激活函数的影响:
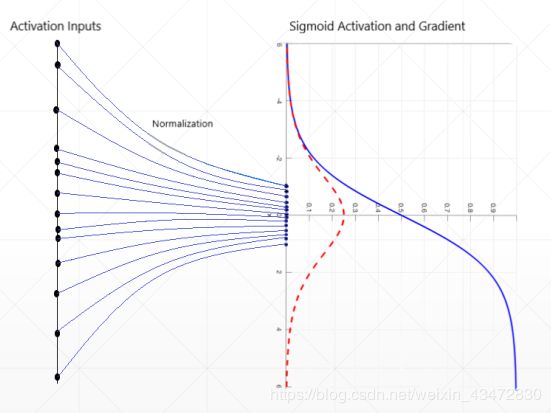
对于S函数,如果输入太大/小的话,会出现梯度离散现象,使得更新速度变快。解决方法:更改数据分布形式,符合正态分布。
x = torch.randn(10, 3, 28, 28) # 10张图片,3个通道,28*28大小
layer = nn.BatchNorm2d(3) # 对每个通道进行归一化,要与需要归一化的图片通道相同
out = layer(x)
print(out.shape) # torch.Size([10, 3, 28, 28])
print(layer.weight) # 权重
print(layer.bias) # 偏置torch.Size([10, 3, 28, 28])
Parameter containing:
tensor([0.9443, 0.8868, 0.1899], requires_grad=True)
Parameter containing:
tensor([0., 0., 0.], requires_grad=True)