车道线检测之lanelines-detection
本篇博客整个项目源码:github
NOTE:本文只介绍了基本的车道线检测方法,预测曲率及车辆位置的车道线检测请戳:无人驾驶之高级车道线检测-AdvanceLanefinding_release
前言
本次博客主要分享Udacity自动驾驶纳米学位的第一个项目,车道线检测算法模型的实现。
本项目主要实现以下几个功能:
- 在一张图片上检测出车道线,并将其标记成红色
- 在一段视频上检测出车道线,并将其标记为红色
基本实现思路
我们采用传统的边缘检测的方法,如canny算法检测出轮廓,然后利用Hough变换检测出直线,最后在图片或者视频上画出直线。模型架构图如下所示: 
这模型实现期间我们使用了一些小技巧:
- 去噪
- 角度滤波器:滤除极小锐角或极大钝角的线段
- 选取黄色的色调,并用白色代替
- 在边缘检测前,放大一些特征
具体代码实现
# importing some useful packages
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
import numpy as np
import cv2
%matplotlib inline#reading in an image
dir_img = 'test_images/'
image = mpimg.imread('test_images/solidWhiteRight.jpg')#RGB
#print out some stats and plotting
print('This image is:',type(image),'with dimensions:',image.shape)
plt.imshow(image)This image is: with dimensions: (540, 960, 3)

车道线检测的一些思路
opencv库为我们提供了一些有用的函数:
cv2.inRange():颜色选择
cv2.fillpoly():区域选择
cv2.line():给定一些端点在图片上画出线
cv2.addWeighted():添加或覆盖两个图像
cv2.cvtColor():转换成灰度图或者改变图像颜色
cv2.imwrite():将图片输出到文件
cv2.bitwise_and():在图片上应用蒙板
接下来我们实现一些辅助函数
import math
def grayscale(img):
'''
灰度转换,返回只有一个颜色通道的图像
'''
return cv2.cvtColor(img,cv2.COLOR_RGB2GRAY)#if you read an image with cv.imread(),return cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
def canny(img,low_threshold,high_threshold):
return cv2.Canny(img,low_threshold,high_threshold)
def gaussian_blur(img,kernel_size):
'''Applies a Gaussian Noise Kernel'''#高斯模糊
return cv2.GaussianBlur(img,(kernel_size,kernel_size),0)
def region_of_interest(img,vertices):
'''
Apply an image mask
'''
#define a blank mask to start with
mask = np.zeros_like(img)
#defining a 3 channel or 1 channel color to fill the mask with depending on the input image
if len(img.shape)>2:
channel_count = img.shape[2]
ignore_mask_color = (255,)channel_count
else:
ignore_mask_color = 255#涂黑
cv2.fillPoly(mask,vertices,ignore_mask_color)
masked_image = cv2.bitwise_and(img,mask)#与操作
return masked_image
def draw_lines(img,lines,color=[255,0,0],thickness=2):
'''
Note:
'''
#print(lines)
for line in lines:
for x1,y1,x2,y2 in line:
cv2.line(img,(x1,y1),(x2,y2),color,thickness)
def hpass_angle_filter(lines,angle_threshold):
if lines.shape!=None:
filtered_lines =[]
for line in lines:
for x1,y1,x2,y2 in line:
angle = abs(np.arctan((y2-y1)/(x2-x1))180/np.pi)
if angle > angle_threshold:
filtered_lines.append([[x1,y1,x2,y2]])
return filtered_lines
def average_lines(img,lines,y_min,y_max):
#return coordinates of the averaged lines
hough_pts = {'m_left':[],'b_left':[],'norm_left':[],'m_right':[],'b_right':[],'norm_right':[]}
if lines != None:
for line in lines:
for x1,y1,x2,y2 in line:
m,b = np.polyfit([x1,x2],(y1,y2),1)
norm = ((x2-x1)2+(y2-y1)2)*0.5
if m>0:#斜率right
hough_pts['m_right'].append(m)
hough_pts['b_right'].append(b)
hough_pts['norm_right'].append(norm)
if m<0:
hough_pts['m_left'].append(m)
hough_pts['b_left'].append(b)
hough_pts['norm_left'].append(norm)
if len(hough_pts['b_left'])!=0 or len(hough_pts['m_left'])!=0 or len(hough_pts['norm_left'])!=0:
b_avg_left = np.mean(np.array(hough_pts['b_left']))
m_avg_left = np.mean(np.array(hough_pts['m_left']))
xmin_left = int((y_min-b_avg_left)/m_avg_left)
xmax_left = int((y_max-b_avg_left)/m_avg_left)
left_lane = [[xmin_left,y_min,xmax_left,y_max]]
else:
left_lane = [[0,0,0,0]]
if len(hough_pts['b_right'])!=0 or len(hough_pts['m_right'])!=0 or len(hough_pts['norm_right'])!=0:
b_avg_right = np.mean(np.array(hough_pts['b_right']))
m_avg_right = np.mean(np.array(hough_pts['m_right']))
xmin_right = int((y_min - b_avg_right)/m_avg_right)
xmax_right = int((y_max-b_avg_right)/m_avg_right)
right_lane = [[xmin_right,y_min,xmax_right,y_max]]
else:
right_lane = [[0,0,0,0]]
return [left_lane,right_lane]
def hough_lines(img,rho,theta,threshold,min_line_len,max_line_gap):
'''
img is the output of canny tranform
return an image with hough lines draw
'''
lines = cv2.HoughLinesP(img,rho,theta,threshold,np.array([]),minLineLength=min_line_len,maxLineGap = max_line_gap)
#print(lines.shape)
#line_img = np.zeros((img.shape[0],img.shape[1],3),dtype=np.uint8)
'''
line2 = []
try:
for line in lines:
for x1,y1,x2,y2 in line:
if abs(y1-y2)<10:
continue
k = float(y2-y1)/(x2-x1)
if y1>y2:
extend = int(x2+(img.shape[0]-y2)/k)
lines2.append([x2-x1,y1,k,extend])
lines2 = np.array(lines2)
lines3 = []
for side in [lines2[lines2[:,2]<0],lines2[lines2[:,2]>0]]:
h2 = side[:,1].min()
side[:,0]/=side[:,0].min()
k1 = np.average(side[:,2],weights=side[:,0])
x1 = np.average(side[:,3],weights=side[:,0])
lines3.append([int(x1),img.shape[0],int(x1-(img.shape[0]-h2)/k1),int(h2)])
arr+=np.array(lines3)
except:
pass
lines4 = arr.data.mean(axis=0)
draw_lines(line_img,[lines4])
'''
#draw_lines(line_img,lines)
return lines
def weighted_img(img,initial_img,a=0.8,b=1,r=0.0):
return cv2.addWeighted(initial_img,a,img,b,r)test images
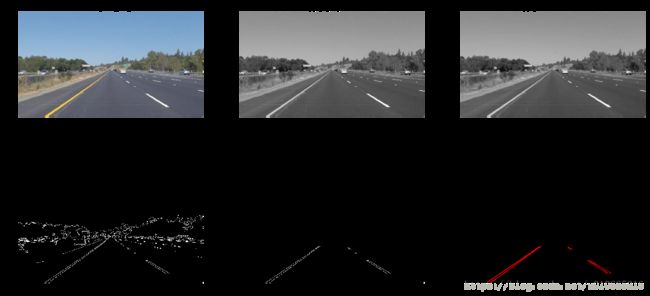
接下来,我们来对一些图片做个测试
import os
dir_img = 'test_images/'
f = os.listdir(dir_img)f = [fname for fname in f if 'jpeg' in fname or 'jpg' in fname] def show_img(ax,img,cmap,title): if cmap=='gray': ax.imshow(img,cmap='gray') else: ax.imshow(img) ax.axis('off') ax.set_title(title) def pipeline(img,vertices,threshold_angle,hline_show): ''' pipeline: ''' # convert to grayscale gray = grayscale(img) # Apply Gaussian Blur:noise smooth noise gray_blur = gaussian_blur(gray,3) # Apply canny edge detector edges = canny(gray_blur,10,180)#这个阈值的选取,主要靠经验 # apply mask imshape = img.shape masked = region_of_interest(edges,vertices) h_lines = hough_lines(masked,rho=1,theta=np.pi/180,threshold=25,min_line_len=10,max_line_gap=10)#检测直线 #Hough Tramsform lines if hline_show['hlines']=='on': hlines_img = np.zeros(imshape,dtype=np.uint8) draw_lines(hlines_img,h_lines,color=[255,0,0],thickness=2) else: hlines_img = np.zeros(imshape,dtype=np.uint8) #Angle High Pass filter h_lines = hpass_angle_filter(h_lines,threshold_angle) # average lines if hline_show['avg']=='on': avg_hlines = average_lines(img,h_lines,int(img.shape[0]0.65),img.shape[0]) avg_img = np.zeros(imshape,dtype=np.uint8) draw_lines(avg_img,avg_hlines,color=[255,0,0],thickness=10) else: avg_img = np.zeros(imshape,dtype=np.uint8) #Display result of each step of the pipeline if hline_show['steps']=='on':,ax = plt.subplots(2,3,figsize=(20,10)) showimg(ax[0,0],img,None,'original_img') show_img(ax[0,1],gray,'gray','Apply grayscale') show_img(ax[0,2],gray_blur,'gray','Apply Gaussian Blur') show_img(ax[1,0],edges,'gray','Apply Canny') show_img(ax[1,1],masked,'gray','Apply mask') show_img(ax[1,2],hlines_img,None,'Apply Hough') plt.show() img_all_lines = weighted_img(hlines_img,img,a=1,b=0.8,r=0.0)#计算两个矩阵的权重和 img_all_lines = weighted_img(avg_img,img_all_lines,a=1,b=0.8,r=0.0) return img_all_lines for img_name in f: #reading in an imag print('Image:',img_name) img = mpimg.imread(dir_img+img_name) hline_show = {'hlines':'on','avg':'off','steps':'on'} imshape = img.shape # vertices 圈定了车道线的范围 vertices = np.array([[(100,imshape[0]),(390,imshape[0]0.65),\ (620,imshape[0]0.65),(imshape[1],imshape[0]),\ (100,imshape[0])]],dtype=np.int32) threshold_angle = 25 lines_img = pipeline(img,vertices,threshold_angle,hline_show) plt.imshow(lines_img) plt.show()
Image: solidYellowCurve2.jpg


Image: solidYellowCurve.jpg


Image: solidWhiteCurve.jpg

Image: solidWhiteRight.jpg


Image: whiteCarLaneSwitch.jpg


Image: solidYellowLeft.jpg

test on video
接下来我们来看看在视频上处理的效果
我们需要在视频上画出车道线
import imageio
#imageio.plugins.ffmpeg.download()
from moviepy.editor import VideoFileClip
from IPython.display import HTMLdef process_image(image):
#返回值必须是一个三通道的彩色图像
hline_show = {'hlines':'on','avg':'on','steps':'off'}
imshape = img.shape
vertices = np.array([[(100,imshape[0]),(390,imshape[0]0.65),\
(620,imshape[0]0.65),(imshape[1],imshape[0]),\
(100,imshape[0])]],dtype=np.int32)
threshold_angle = 25
return pipeline(image,vertices,threshold_angle,hline_show)dir_video = 'test_videos/'
white_output = dir_video+'white.mp4'
clip1 = VideoFileClip(dir_video+'solidWhiteRight.mp4')
white_clip = clip1.fl_image(process_image)
%time white_clip.write_videofile(white_output,audio=False)[MoviePy] >>>> Building video test_videos/white.mp4
[MoviePy] Writing video test_videos/white.mp4
100%|█████████▉| 221/222 [00:02<00:00, 77.20it/s]
[MoviePy] Done.
[MoviePy] >>>> Video ready: test_videos/white.mp4
CPU times: user 1.99 s, sys: 125 ms, total: 2.12 s
Wall time: 3.07 s
HTML('''
''')
Imporvement
接下来我们来看看一些值得改善与提高的地方:
我们知道,车道线检测算法的性能受道路上的一些“噪声”的影响,比如说阴影、道路损坏等。
有些断断续续的路段可以通过高通滤波器来连接。但是算法并不适用于跟踪弯曲车道线
因此我们从以下三个方面来提高算法的性能:
- 角度滤波器:滤除极小锐角或极大钝角的线段
- 选取黄色的色调,并用白色代替
- 在边缘检测前,放大一些特征
def bypass_angle_filter(lines,low_thres,hi_thres): ''' 前面的代码中,我们也实现了一个角度滤波器,但是这两个函数还是有区别的, 前面的函数只有一个阈值,而这个函数有两个阈值,并只保留阈值之间的角度 ''' filtered_lines = [] for line in lines: for x1,y1,x2,y2 in line: angle = abs(np.arctan((y2-y1)/(x2-x1))180/np.pi) if angle > low_thres and angle < hi_thres: filtered_lines.append([[x1,y1,x2,y2]]) return filtered_lines def yellow_enhance(img_rgb): ''' 该函数将rgb中淡黄色转换成白色,主要分三步: step1:convert rgb to hsv step2:create a lower/upper range of hsv step3:create a mask ''' img_hsv = cv2.cvtColor(img_rgb,cv2.COLOR_BGR2HSV) lower_yellow = np.array([40,100,20]) upper_yellow = np.array([100,255,255]) mask = cv2.inRange(img_hsv,lower_yellow,upper_yellow) gray = grayscale(img_rgb) return weighted_img(mask,gray,a=1.,b=1.,r=0.) def pipeline(img,vertices,low_thres,hi_thres,hline_show): #convert to grayscale + enhance yellow-ish tone gray = yellow_enhance(img) #remove /cleanup noise gray_blur = gaussian_blur(gray,3) # dilate features for large gap between edges line gray =cv2.dilate(gray,(3,3),iterations=10) edges = canny(gray,50,180) imshape = img.shape masked = region_of_interest(edges,vertices) h_lines = hough_lines(masked,rho=1,theta=np.pi/180,threshold=26,min_line_len=5,max_line_gap=50) if hline_show['hlines']=='on': hlines_img = np.zeros(imshape,dtype=np.uint8) draw_lines(hlines_img,h_lines,color=[255,0,0],thickness=4) else: hlines_img = np.zeros(imshape,dtype=np.uint8) # Angle High Pass filter h_lines = bypass_angle_filter(h_lines,low_thres,hi_thres) #averaging lines if hline_show['avg'] == 'on': avg_hlines = average_lines(img,h_lines,int(img.shape[0]0.65),img.shape[0]) avg_img = np.zeros(imshape,dtype=np.uint8) draw_lines(avg_img,avg_hlines,color=[255,0,0],thickness=10) else: avg_img = np.zeros(imshape,dtype=np.uint8) #Display result of each step of the pipeline if hline_show['steps']=='on':,ax = plt.subplots(2,3,figsize=(20,10)) show_img(ax[0,0],img,None,'original_img') show_img(ax[0,1],gray,'gray','Apply grayscale') show_img(ax[0,2],gray_blur,'gray','Apply Gaussian Blur') show_img(ax[1,0],edges,'gray','Apply Canny') show_img(ax[1,1],masked,'gray','Apply mask') show_img(ax[1,2],hlines_img,None,'Apply Hough') plt.show() img_all_lines = weighted_img(hlines_img,img,a=1.,b=0.8,r=0.) img_all_lines = weighted_img(avg_img,img_all_lines,a=1.,b=0.8,r=0.) return img_all_lines
def process_image(image):
hline_show = {'hlines':'off','avg':'on','steps':'off'}
imshape = [720,1280]
vertices = np.array([[(200,imshape[0]-80),(490,imshape[0]0.65),\
(820,imshape[0]0.65),(imshape[1]-150,imshape[0]-80),\
(100,imshape[0]-80)]],dtype=np.int32)
low_thres,hi_thres = [30,80]
return pipeline(image,vertices,low_thres,hi_thres,hline_show)challenge_output = dir_video +'extra.mp4'
clip2 = VideoFileClip(dir_video+'challenge.mp4')
challenge_clip = clip2.fl_image(process_image)
%time challenge_clip.write_videofile(challenge_output,audio=False)[MoviePy] >>>> Building video test_videos/extra.mp4
[MoviePy] Writing video test_videos/extra.mp4
100%|██████████| 251/251 [00:06<00:00, 37.31it/s]
[MoviePy] Done.
[MoviePy] >>>> Video ready: test_videos/extra.mp4
CPU times: user 5.55 s, sys: 213 ms, total: 5.77 s
Wall time: 7.43 s
无人驾驶之高级车道线检测-AdvanceLane_finding_release