CNN卷积神经网络手写数字识别实例及代码详解
本文的代码来自githup的Deep Learning的toolbox,是用Matlab实现的。感谢该toolbox的作者付出和分享。
我在应该该代码进行训练时,出现一些报错,如expand函数应用不对,sigm函数和flipall函数未定义等问题,对这些问题进行了修正,完成网络训练和验证。
本文mnist_uint8.mat的获取可以参照我的另一篇博客:MNIST数据库处理--matlab生成mnist_uint8.mat http://blog.csdn.net/fuwenyan/article/details/53954615
本文作者:非文艺小燕儿,VivienFu,
欢迎大家转载适用,请注明出处。http://blog.csdn.net/fuwenyan?viewmode=contents http://blog.csdn.net/fuwenyan?viewmode=contents
学习该代码需要一定的CNN理论基础。
目的:实现手写数字识别
数据集:MNIST数据集,60000张训练图像,10000张测试图像,每张图像size为28*28
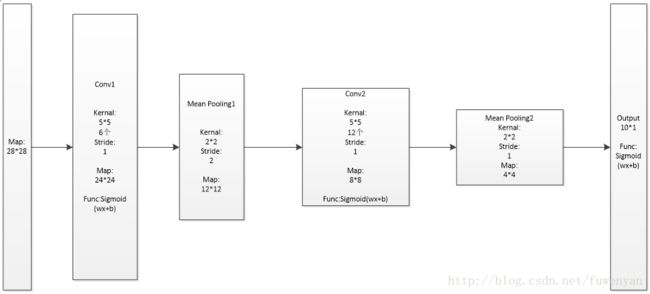
网络层级结构概述:5层神经网络
Input layer: 输入数据为原始训练图像
Conv1:6个5*5的卷积核,步长Stride为1
Pooling1:卷积核size为2*2,步长Stride为2
Conv2:12个5*5的卷积核,步长Stride为1
Pooling2:卷积核size为2*2,步长Stride为2
Output layer:输出为10维向量
网络层级结构示意图如下:
代码流程概述:
(1)获取训练数据和测试数据;
(2)定义网络层级结构;
(3)初始设置网络参数(权重W,偏向b)cnnsetup(cnn, train_x, train_y)
(4)训练超参数opts定义(学习率,batchsize,epoch)
(5)网络训练之前向运算cnnff(net, batch_x)
(6)网络训练之反向传播cnnbp(net, batch_y)
(7)网络训练之参数更新cnnapplygrads(net, opts)
(8)重复(5)(6)(7),直至满足epoch
(9)网络测试cnntest(cnn, test_x, test_y)
详细代码及我的注释
cnnexamples.m
clear all; close all; clc;
load mnist_uint8;
train_x = double(reshape(train_x',28,28,60000))/255; %数据归一化至[0 1]之间
test_x = double(reshape(test_x',28,28,10000))/255; %数据归一化至[0 1]之间
train_y = double(train_y');
test_y = double(test_y');
%% ex1
%will run 1 epoch in about 200 second and get around 11% error.
%With 100 epochs you'll get around 1.2% error
cnn.layers = {
struct('type', 'i') %input layer
struct('type', 'c', 'outputmaps', 6, 'kernelsize', 5) %convolution layer,6个5*5的卷积核,可以得到6个outputmaps
struct('type', 's', 'scale', 2) %sub sampling layer ,2*2的下采样卷积核
struct('type', 'c', 'outputmaps', 12, 'kernelsize', 5) %convolution layer ,12个5*5的卷积核,可以得到12个outputmaps
struct('type', 's', 'scale', 2) %subsampling layer ,2*2的下采样卷积核
}; %定义了一个5层神经网络,还有一个输出层,并未在这里定义。
cnn = cnnsetup(cnn, train_x, train_y); %通过该函数,对网络初始权重矩阵和偏向进行初始化
opts.alpha = 1; % 学习率
opts.batchsize = 50; %每batchsize张图像一起训练一轮,调整一次权值。
% 训练次数,用同样的样本集。我训练的时候:
% 1的时候 11.41% error
% 5的时候 4.2% error
% 10的时候 2.73% error
opts.numepochs = 10; %每个epoch内,对所有训练数据进行训练,更新(训练图像个数/batchsize)次网络参数
cnn = cnntrain(cnn, train_x, train_y, opts); %网络训练
[er_test, bad_test] = cnntest(cnn, test_x, test_y); %网络测试
%plot mean squared error
plot(cnn.rL);
%show test error
disp(['10000 test images ' num2str(er_test*100) '% error']);
[er_train, bad_train] = cnntest(cnn, train_x, train_y); %网络测试
disp(['60000 train images ' num2str(er_train*100) '% error']);
cnnsetup.m
function net = cnnsetup(net, x, y)
inputmaps = 1; %每个batch中的所有图片并行运算,但处理方法都是相同的。所以对于输入层inputmaps=1,对于其他层,inputmaps=上一层的outputmaps
mapsize = size(squeeze(x(:, :, 1))); %squeeze(x(:, :, 1))相当于取第一个图像样本后,再把第三维移除,得到一张图象size[28 28]
for l = 1 : numel(net.layers) % layer %对每一层网络进行遍历处理,net.layers中有五个struct类型的元素,此处numel(net.layers)=5
if strcmp(net.layers{l}.type, 's') %下采样层(也叫pooling层)处理,获取下采样后的mapsize,和初始偏置
mapsize = floor(mapsize / net.layers{l}.scale); %此处下采样的步长stride=scale,
for j = 1 : inputmaps %此处不应该是outputmap的数吗?对于Pooling层,inputmaps=outputmaps
net.layers{l}.b{j} = 0; % 将偏置初始化为0
end
end %Pooling层没有权重矩阵初始化?
if strcmp(net.layers{l}.type, 'c') %卷积层处理,获取下一层的mapsize,权重的初始化和偏置的初始化,下一层的inputmaps
% 旧的mapsize保存的是上一层的特征map的大小,那么如果卷积核的移动步长是1,那用
% kernelsize*kernelsize大小的卷积核卷积上一层的特征map后,得到的新的map的大小就是下面这样
mapsize = mapsize - net.layers{l}.kernelsize + 1; %卷积步长stride为1的情况
% 该层需要学习的参数个数。每张特征map是一个(后层特征图数量)*(用来卷积的patch图的大小)
% 因为是通过用一个核窗口在上一个特征map层中移动(核窗口每次移动1个像素),遍历上一个特征map
% 层的每个神经元。核窗口由kernelsize*kernelsize个元素组成,每个元素是一个独立的权值,所以
% 就有kernelsize*kernelsize个需要学习的权值,再加一个偏置值。另外,由于是权值共享,也就是
% 说同一个特征map层是用同一个具有相同权值元素的kernelsize*kernelsize的核窗口去感受输入上一
% 个特征map层的每个神经元得到的,所以同一个特征map,它的权值是一样的,共享的,权值只取决于
% 核窗口。然后,不同的特征map提取输入上一个特征map层不同的特征,所以采用的核窗口不一样,也
% 就是权值不一样,所以outputmaps个特征map就有(kernelsize*kernelsize+1)* outputmaps那么多的权值了
% 但这里fan_out只保存卷积核的权值W,偏置b在下面独立保存
fan_out = net.layers{l}.outputmaps * net.layers{l}.kernelsize ^ 2; %计算卷积核权重参数的总数,对于Conv1:6*5*5=150,对于Conv2:12*5*5=300
for j = 1 : net.layers{l}.outputmaps % output map %Conv1:6;Conv2:12
% fan_out保存的是对于上一层的一张特征map,我在这一层需要对这一张特征map提取outputmaps种特征, 所需要的权重总数
% 提取每种特征用到的卷积核不同,所以fan_out保存的是这一层输出新的特征需要学习的参数个数
% 而,fan_in保存的是,我在这一层,要连接到上一层中所有的特征map,然后用fan_out保存的提取特征
% 的权值来提取他们的特征。也即是对于每一个当前层特征图,有多少个参数链到前层
fan_in = inputmaps * net.layers{l}.kernelsize ^ 2; %每一个inputmap经过outputmaps个卷积核提取outputmaps种特征,得到outputmaps个输出。 不同的inputmap对应不同的卷积核
for i = 1 : inputmaps % input map
% 随机初始化权值,也就是共有outputmaps个卷积核,对上层的每个特征map,都需要用这么多个卷积核
% 去卷积提取特征。
% rand(n)是产生n×n的 0-1之间均匀取值的数值的矩阵,再减去0.5就相当于产生-0.5到0.5之间的随机数
% 再 *2 就放大到 [-1, 1]。然后再乘以后面那一数,why?
% 反正就是将卷积核每个元素初始化为[-sqrt(6 / (fan_in + fan_out)), sqrt(6 / (fan_in + fan_out))]
% 之间的随机数。因为这里是权值共享的,也就是对于一张特征map,所有感受野位置的卷积核都是一样的
% 所以只需要保存的是 inputmaps * outputmaps 个卷积核。
net.layers{l}.k{i}{j} = (rand(net.layers{l}.kernelsize) - 0.5) * 2 * sqrt(6 / (fan_in + fan_out)); %为什么要乘以后面的数?
end
net.layers{l}.b{j} = 0; % 将偏置初始化为0
end
% 只有在卷积层的时候才会改变特征map的个数,pooling的时候不会改变个数。这层输出的特征map个数就是
% 输入到下一层的特征map个数
inputmaps = net.layers{l}.outputmaps;
end
end
%下面开始初始化输出层网络参数。输出层与前一层之间是全连接。
% 这一层的上一层是经过pooling后的层,包含有inputmaps个特征map。每个特征map的大小是mapsize。
% 所以,该层的神经元个数是 inputmaps * (每个特征map的大小)
% For vectors, prod(X) 是X元素的连乘积
fvnum = prod(mapsize) * inputmaps; %输出层前一层的神经元个数,即像素数目 5*5*12=300
% onum 是标签的个数,也就是输出层神经元的个数。你要分多少个类,自然就有多少个输出神经元
onum = size(y, 1); % y为10*60000的矩阵,10表示10个类别,60000表示训练图像的个数,如第一张图像为1,则y(:,1)=[0 1 0 0 0 0 0 0 0 0]
net.ffb = zeros(onum, 1); %初始化输出层的偏向b为0
net.ffW = (rand(onum, fvnum) - 0.5) * 2 * sqrt(6 / (onum + fvnum)); %初始化输出层与前一层的权重矩阵,为全连接层FC,size为[10 300]
end
cnntrain.m
function net = cnntrain(net, x, y, opts)
m = size(x, 3); % m 保存的是 训练样本个数 %本次应用60000个训练样本
numbatches = m / opts.batchsize; %本次应用batchsize为50,numbatches =1200
% rem: Remainder after division. rem(x,y) is x - n.*y 相当于求余
% rem(numbatches, 1) 就相当于取其小数部分,如果为0,就是整数
if rem(numbatches, 1) ~= 0 %检验训练样本数是否能被batchsize整除
error('numbatches not integer');
end
net.rL = []; %这是什么
for i = 1 : opts.numepochs %本次应用opts.numepochs=10
disp(['epoch ' num2str(i) '/' num2str(opts.numepochs)]); %进展打印,当前运行到第i个epoch
% tic 和 toc 是用来计时的,计算这两条语句之间所耗的时间
tic;
% P = randperm(N) 返回[1, N]之间所有整数的一个随机的序列,例如
% randperm(6) 可能会返回 [2 4 5 6 1 3]
% 这样就相当于把原来的样本排列打乱,再挑出一些样本来训练
kk = randperm(m); %每一轮epoch都要将所有训练集进行随机打乱
for l = 1 : numbatches %每个batch训练后更新一次网络参数
disp(['batch ' num2str(l) '/' num2str(numbatches)]); %进展打印,当前运行到第l个batch
batch_x = x(:, :, kk((l - 1) * opts.batchsize + 1 : l * opts.batchsize)); %每次取一个batchsize(50)张图像进行同步训练
batch_y = y(:, kk((l - 1) * opts.batchsize + 1 : l * opts.batchsize));
net = cnnff(net, batch_x); % Feedforward前向传递,在当前的网络权值和网络输入下计算网络的输出,包涵每一层的输入输出
net = cnnbp(net, batch_y); % Backpropagation反向传播,得到损失函数对网络参数(权重和偏向)的梯度(偏导)
net = cnnapplygrads(net, opts); %根据损失函数对网络参数(权重和偏向)的梯度(偏导),更新网络参数
if isempty(net.rL)
net.rL(1) = net.L; % 代价函数值,也就是误差值,net.L为网络均方误差的1/2
end
net.rL(end + 1) = 0.99 * net.rL(end) + 0.01 * net.L; % 保存历史的误差值,以便画图分析,为什么采用比例求和的方式?
end
toc; %打印每个epoch执行时间
end
end
cnnff.m
function net = cnnff(net, x)
n = numel(net.layers); % 层数
net.layers{1}.a{1} = x; % 网络的第一层就是输入,包含了batchsize个训练图像,并行训练
inputmaps = 1; % 输入层只有一个特征map,也就是输入的一张图像,虽然实际输入是batchsize个训练图像,由于是并行运算,所以可以理解为一条线上只有一张图像
for l = 2 : n % 对输入层与输出层之间的每一层进行处理
if strcmp(net.layers{l}.type, 'c') % 卷积层
% !!below can probably be handled by insane matrix operations
% 对每一个输入map,或者说我们需要用outputmaps个不同的卷积核去卷积图像
for j = 1 : net.layers{l}.outputmaps % for each output map %第一个卷积层6个outputmaps,第二个卷积层12个outputmaps
% create temp output map
% 对上一层的每一张特征map,卷积后的特征map的大小就是
% (输入map宽 - 卷积核的宽 + 1)* (输入map高 - 卷积核高 + 1)
% 对于这里的层,因为每层都包含多张特征map,对应的索引保存在每层map的第三维
% 所以,这里的z保存的就是该层中所有的特征map了
z = zeros(size(net.layers{l - 1}.a{1}) - [net.layers{l}.kernelsize - 1 net.layers{l}.kernelsize - 1 0]); %初始l层输出特征map,第一个卷积层map的size为[28 28 50]-[4,4,0]=[24 24 50],第三维为batchsize
for i = 1 : inputmaps % for each input map 每个卷积核对所有inputmaps进行卷积后,求和,得到一个该卷积核对应的outputmap
% convolve with corresponding kernel and add to temp output map
% 将上一层的每一个特征map(也就是这层的输入map)与该层的卷积核进行卷积
% 然后将对上一层特征map的所有结果加起来。也就是说,当前层的一张特征map,是
% 用一种卷积核去卷积上一层中所有的特征map,然后所有特征map对应位置的卷积值的和
% 另外,有些论文或者实际应用中,并不是与全部的特征map链接的,有可能只与其中的某几个连接
z = z + convn(net.layers{l - 1}.a{i}, net.layers{l}.k{i}{j}, 'valid'); % k{i}{j}为卷积核,第一个卷积层得到的z的size为[24 24 50]
end
% add bias, pass through nonlinearity
% 加上对应位置的基b,然后再用sigmoid函数算出特征map中每个位置的激活值,作为该层输出特征map
net.layers{l}.a{j} = sigm(z + net.layers{l}.b{j});
end
% set number of input maps to this layers number of outputmaps
inputmaps = net.layers{l}.outputmaps;
elseif strcmp(net.layers{l}.type, 's') % 下采样层,采用均值进行下采样,下采样层无激励函数
for j = 1 : inputmaps
% !! replace with variable
% 例如我们要在scale=2的域上面执行mean pooling,那么可以卷积大小为2*2,每个元素都是1/4的卷积核
z = convn(net.layers{l - 1}.a{j}, ones(net.layers{l}.scale) / (net.layers{l}.scale ^ 2), 'valid');
% 因为convn函数的默认卷积步长为1,而pooling操作的域是没有重叠的,所以对于上面的卷积结果
% 最终pooling的结果需要从上面得到的卷积结果中以scale=2为步长,跳着把mean pooling的值读出来
net.layers{l}.a{j} = z(1 : net.layers{l}.scale : end, 1 : net.layers{l}.scale : end, :);
end
end
end
%以下进行输出层的处理,输出层与前一层是全连接。
%输出层10个神经元,分别代表10类图像。
%输出层的前一层神经元个数为所有特征map像素点的和,也就是每个像素点都是一个神经元
% concatenate all end layer feature maps into vector
net.fv = []; %存放reshape后的输出层前一层的特征map(所有特征map一起)
for j = 1 : numel(net.layers{n}.a) % 输出层前一层的特征map的个数 %此应用为12个
sa = size(net.layers{n}.a{j}); % 第j个特征map的大小 %考虑batchsize为[4 4 50]
% 将所有的特征map拉成一条列向量。还有一维就是对应的样本索引。每个样本一列,每列为对应的特征向量
net.fv = [net.fv; reshape(net.layers{n}.a{j}, sa(1) * sa(2), sa(3))]; %由最后一层特征map reshape得到,其size为[16 50]
end %最后得到的net.fv的size为[numel(net.layers{n}.a)*16 50],即把输出层前一层的所有特征map拉成一条列向量
% feedforward into output perceptrons
% 计算网络的最终输出值。sigmoid(W*X + b),注意是同时计算了batchsize个样本的输出值
net.o = sigm(net.ffW * net.fv + repmat(net.ffb, 1, size(net.fv, 2))); %输出值的size为[10 50],10为10类上的输出,50为batchsize
end
cnnbp.m
function net = cnnbp(net, y)
n = numel(net.layers); % 网络层数 %5
net.e = net.o - y; %计算网络运算输出与实际分类之间的偏差,size为[10 50]
% loss function
net.L = 1/2* sum(net.e(:) .^ 2) / size(net.e, 2); %方差损失函数,为了方便求导取了1/2。将一个batch内的所有图像偏差一起计算并取均值
%% backprop deltas
net.od = net.e .* (net.o .* (1 - net.o)); % 输出层的梯度 net.e为损失函数对net.o的导数,(net.o .* (1 - net.o))为sigmoid输出对输入的导数,size[10 50]
% 残差 反向传播回 前一层
net.fvd = (net.ffW' * net.od); % feature vector delta %输出层前一层的梯度,是下采样层,f(x)=x,没有sigmoid激励函数,size [16*12 50]
if strcmp(net.layers{n}.type, 'c') % only conv layers has sigm function
net.fvd = net.fvd .* (net.fv .* (1 - net.fv)); %如果是卷积层,有sigmoid激励函数,需要追加乘上sigmoid的导数 ,size [16*12 50]
end
% reshape feature vector deltas into output map style
sa = size(net.layers{n}.a{1}); % 最后一层特征map的大小。这里的最后一层都是指输出层的前一层
fvnum = sa(1) * sa(2); % 因为是将最后一层特征map拉成一条向量,所以对于一个样本来说,特征维数是这样
for j = 1 : numel(net.layers{n}.a) % 最后一层的特征map的个数
% 在fvd里面保存的是所有样本的特征向量(在cnnff.m函数中用特征map拉成的),所以这里需要重新
% 变换回来特征map的形式。d 保存的是 delta,也就是 灵敏度 或者 残差
net.layers{n}.d{j} = reshape(net.fvd(((j - 1) * fvnum + 1) : j * fvnum, :), sa(1), sa(2), sa(3));
end
% 对于 输出层前面的层(与输出层计算残差的方式不同)
for l = (n - 1) : -1 : 1
if strcmp(net.layers{l}.type, 'c')
for j = 1 : numel(net.layers{l}.a) % 该层特征map的个数
% net.layers{l}.d{j} 保存的是 第l层 的 第j个 map 的 灵敏度map。 也就是每个神经元节点的delta的值
for k = 1:size(net.layers{l + 1}.d{j}, 3)
net.layers{l}.d{j}(:,:,k) = net.layers{l}.a{j}(:,:,k) .* (1 - net.layers{l}.a{j}(:,:,k)) .* kron(net.layers{l + 1}.d{j}(:,:,k), ones(net.layers{l + 1}.scale)) / net.layers{l + 1}.scale ^ 2;
end
% net.layers{l}.d{j} = net.layers{l}.a{j} .* (1 - net.layers{l}.a{j}) .* (expand(net.layers{l + 1}.d{j}, [net.layers{l + 1}.scale net.layers{l + 1}.scale 1]) / net.layers{l + 1}.scale ^ 2); %卷积层input和output map数不一定相等,因此需要expand处理。expand(matrix(4*4*50),[2 2 1])/4 size为[8*8*50]
end
elseif strcmp(net.layers{l}.type, 's')
for i = 1 : numel(net.layers{l}.a) % 第l层特征map的个数
z = zeros(size(net.layers{l}.a{1}));
for j = 1 : numel(net.layers{l + 1}.a) % 第l+1层特征map的个数
z = z + convn(net.layers{l + 1}.d{j}, rot180(net.layers{l + 1}.k{i}{j}), 'full'); %下采样层f(x)=x,导数为1
end
net.layers{l}.d{i} = z; %得到下采样层的梯度
end
end
end
%% calc gradients
% 这里与 Notes on Convolutional Neural Networks 中不同,这里的 子采样 层没有参数,也没有
% 激活函数,所以在子采样层是没有需要求解的参数的
for l = 2 : n
if strcmp(net.layers{l}.type, 'c')
for j = 1 : numel(net.layers{l}.a)
for i = 1 : numel(net.layers{l - 1}.a)
% dk 保存的是 误差对卷积核 的导数
net.layers{l}.dk{i}{j} = convn(flipall(net.layers{l - 1}.a{i}), net.layers{l}.d{j}, 'valid') / size(net.layers{l}.d{j}, 3); %除去batchsize,得到delta_W
end
% db 保存的是 误差对于bias基 的导数
net.layers{l}.db{j} = sum(net.layers{l}.d{j}(:)) / size(net.layers{l}.d{j}, 3);
end
end
end
% 最后一层perceptron的gradient的计算
net.dffW = net.od * (net.fv)' / size(net.od, 2);
net.dffb = mean(net.od, 2);
function X = rot180(X)
X = flipdim(flipdim(X, 1), 2);
end
function X=flipall(X)
for m=1:ndims(X)
X=flipdim(X,m);
end
end
end
sigm.m(修复之前运行提示找不到sigm函数的bug,把cnnbp.m中的sigm提出来,单独做一个m文件)
- function y=sigm(x)
- y=1./(1+exp(-x));
- end
cnnapplygrads.m
function net = cnnapplygrads(net, opts)
for l = 2 : numel(net.layers)
if strcmp(net.layers{l}.type, 'c')
for j = 1 : numel(net.layers{l}.a)
for ii = 1 : numel(net.layers{l - 1}.a)
% 这里没什么好说的,就是普通的权值更新的公式:W_new = W_old - alpha * de/dW(误差对权值导数)
net.layers{l}.k{ii}{j} = net.layers{l}.k{ii}{j} - opts.alpha * net.layers{l}.dk{ii}{j};
end
end
net.layers{l}.b{j} = net.layers{l}.b{j} - opts.alpha * net.layers{l}.db{j};
end
end
net.ffW = net.ffW - opts.alpha * net.dffW;
net.ffb = net.ffb - opts.alpha * net.dffb;
end
cnntest.m
function [er, bad] = cnntest(net, x, y)
% feedforward
net = cnnff(net, x); % 前向传播得到输出
% [Y,I] = max(X) returns the indices of the maximum values in vector I
[~, h] = max(net.o); % 找到最大的输出对应的标签
[~, a] = max(y); % 找到最大的期望输出对应的索引
bad = find(h ~= a); % 找到他们不相同的个数,也就是错误的次数
er = numel(bad) / size(y, 2); % 计算错误率
end
使用我自己普通配置的笔记本进行的训练,每个epoch训练时间在3到4分钟。
训练结果为:
10000 test images0.01% error
60000 train images0.0016667% error
以上分析 若有错误之处,还希望大家帮忙指正。一起学习,共同进步。