DSP/BIOS详解入门
百度百科DSPBIOS
DSP/BIOS是TI公司特别为其TMS320C6000TM,TMS320C5000TM和TMS320C28xTM系列DSP平台所设计开发的一个尺寸可裁剪的实时多任务操作系统内核,是TI公司的Code Composer StudioTM开发工具的组成部分之一。
DSP/BIOS 实时操作系统介绍 TI公司的DSP开发软件包括集成开发系统(CCS), 实时操作系统(DSP/BIOS),第三方算法库标准(eXpressDSP)。下面重点介绍DSP/BIOS。 DSP/BIOS是一个用户可剪裁的实时操作系统,主要由三部分组成:多线程实时内核;实时分析工具;芯片支持库。利用实时操作系统开发程序,可以方便快速的开发复杂的DSP程序。操作系统维护调度多线程的运行,只需将定制的数字信号算法作为一个线程嵌入系统即可;芯片支持库帮助管理外设资源,复杂的外设寄存器初始化可以利用直接图形工具配置;实时分析工具可以帮助分析算法实时运行情况。 DSP/BIOS以模块化方式提供给用户对线程、中断、定时器、内存资源、所有外设资源的管理能力都可以根据需要剪裁。实际应用中需要的定制算法作为一个线程插入DSP/BIOS的调度队列,由DSP/BIOS进行调度。使用前需阅读了解DSP/BIOS用户手册和DSP/BIOS设备驱动的开发与使用,具体内容包括DSP/BIOS概述、程序生成、监测、线程调度、存储器和低级函数、I/O概述和管道、流I/O和设备驱动;设备驱动开发工具包(DDK)简介、DSP/BIOS设备驱动的结构和使用、使用DSP/BIOS设备驱动、GIO类驱动、微型驱动的开发步骤、IOM接口、PIO适配器、LIO模型到IOM模型的移植和GIO API的ASYNC扩展。
1 DSP/BIOS简介DSP/BIOS是CCS中集成的一个简易的嵌入式实时操作系统,能够大大方便用户编写多任务应用程序。DSP/BIOS拥有很多实时嵌入式操作系统的功能,如任务的调度,任务间的同步和通信,内存管理,实时时钟管理,中断服务管理等。有了它,用户可以编写复杂的多线程程序,并且会占用更少的CPU和内存资源。 DSP/BIOS是一个可用于实时调度、同步,主机和目标机通信,以及实时分析系统上的一个可裁减实时内核,它提供了抢占式的多任务调度,对硬件的及时反应,实时分析和配置工具等。同时提供标准的API接口,易于使用。它是TI的eXpressDSP实时软件技术的的一个关键部分。
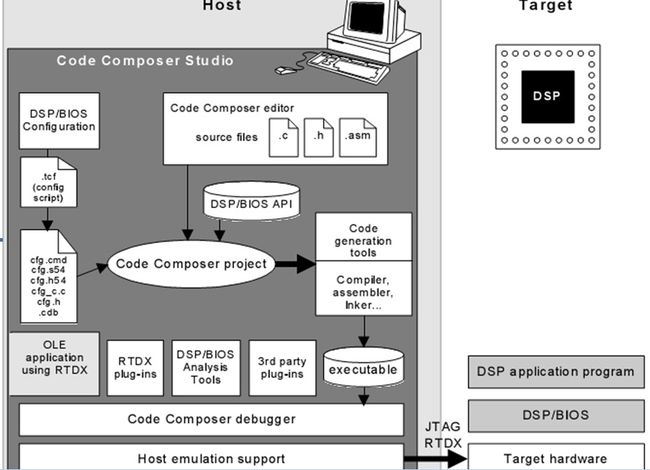
1.1 DSP/BIOS的组件构成DSP/BIOS在一个主机/目标机环境中的组件分布如图 39所示:
图 39 ? DSP/BIOS API:编写的程序可以调用API接口函数; ? DSP/BIOS配置:创建的配置文件定义了程序使用的静态BIOS对象; ? DSP/BIOS分析工具:集成在CCS上的一些BIOS分析工具可以对运行与目标设备上的程序进行监测,包括CPU负载、时间、日志、线程执行状态等。
DSP/BIOS分为很多模块,提供的所有API函数都按照模块分类,以模块名加下划线开头来命名,如图 40所示为DSP/BIOS的全部模块。 图 40
1.2 DSP/BIOS的启动顺序当DSP/BIOS的应用程序启动时,一般遵循下面的步骤: 1) 初始化DSP:DSP/BIOS程序从C/C++环境入口c_int00开始运行。对于C6000平台,在c_int00开始处,系统栈指针(B15)和全局页指针(B14)被分别设置在堆栈断的末尾和.bss断的开始。控制寄存器AMR、IER、CSR等被初始化; 2) 初始化.bss段:当堆栈被设置完成后,初始化任务被调用,利用.cinit的记录对.bss断的变量进行初始化; 3) 调用BIOS_init初始化用到的各个模块:BIOS_init调用MOD_init对配置用到的各个模块进行初始化,包括HWI_init、HST_init、IDL_init等; 4) 处理.pinit表:.pinit表包含一些指向初始化函数的指针,对C++程序,全局对象类的创建也在此时完成; 5) 调用用户程序的main函数:用户main函数可以是C/C++函数或者汇编语言函数,对于汇编函数,使用_main的函数名。由于此时的硬件、软件中断还没有被使能,所以在用户主函数的初始化中需要注意,可以使能单独的中断屏蔽位,但是不能调用类似HWI_enable的接口来使能全局中断; 6) 调用BIOS_start启动DSP/BIOS:BIOS_start在用户main函数退出后被调用,它负责使能使用的各个模块并调用MOD_startup启动每个模块。包括CLK_startup、PIP_startup、SWI_startup、HWI_startup等。当TSK管理模块在配置中被使用时,TSK_startup被执行,并且BIOS_start将不会结束返回; 7) 执行idle循环:有两种方式进入idle循环。当TSK管理模块使能时,任务调度器运行的TSK_idle任务调用IDL_loop在其它任务空闲时进入idle循环;当TSK模块未被使用时,BIOS_start调用将返回,并执行IDL_loop进入永久的idle循环,此时硬件和软件中断可以抢占idle循环得到执行。由于idle循环中管理和主机的通信,因此主机和目标机之间的数据交互可以进行了。
1.3 DSP/BIOS的配置DSP/BIOS的静态配置是利用CCS提供的配置工具完成,包括图形化配置工具和文本配置工具。图形化工具层次清晰,比较直观,而文本工具更加灵活。通常使用图形化的配置方法,下面对主要的模块配置做一些介绍。 1.3.1 Global Setting Properties右键点击“Global Settings”,点击“What’s This”,会弹出帮助窗口,该文件中有Global Setting Properties的各项设置说明。下面介绍的其他如MEM、LOG等配置都可以用同样的方法得到相应的帮助。 选择弹出菜单中的“Properties”,如图 41所示。 图 41 弹出如图 42所示对话框: 图 42 一般选择默认设置即可,CLKOUT项需要根据DSP硬件单板提供的工作时钟设置,Himalaya通常运行在1GHz频率。 DSP Endian Mode 项根据实际情况设置。
1.3.2 MEM设置MEM模块设置中可以根据具体情况设置不同的内存段,其中存在一个默认的IRAM片内内存段。需要注意的是,首先必须在IRAM段上设置一个heap段落,用于BIOS的内部使用。设置方法是在IRAM段上右键选择“Properties”,弹出如图 43对话框,必须设置红线框中的选项,heap size可根据情况具体设置。 图 43 接下来配置MEM全局属性,右键点击配置窗口中的“MEM…”,如图 44所示: 图 44 点击“Properties”,弹出如图 45所示窗口: 图 45 如图红线框中,两个heap段都要选择为IRAM,“Stack Size”项需要根据实际情况设置最大的栈大小,其他使用缺省设置即可。 在图 44的菜单中,点击“Insert MEM”可创建新的内存段。在新的内存段名上右键选择“Properties”弹出如图 43窗口,根据情况设置base(基地址)、len(段长度)、heap size(用于MEM动态内存分配的堆大小)。
1.3.3 LOG设置LOG用于输出和记录一些打印信息,默认存在一个LOG_system对象,是系统内部用来处理打印信息的,不需要去设置。可以增加新的LOG对象,用来在应用程序中输出打印信息。如图 46,在LOG标签上右键选择“Insert LOG”,填写对象名LOG_test即建立了一个新的LOG对象。 图 46 在LOG_test标签上右键选择“Properties”,弹出如图 47窗口,可对此LOG对象属性作一些设置。具体设置含义可通过Help查看。 图 47
1.3.4 CLK设置在CLK属性中通常选择定时器Timer0作为DSP/BIOS的基准时钟,计时分辩率设置为每秒1000次中断,在1GHz系统时钟下,近似为每次定时中断间隔999.996微秒。Timer Mode选择为32bit unchained模式,即使用TCI6482的TMR0的TIMLO作为Timer0,而TIMHI还可以作其它用途使用。CLK属性配置界面如图 48所示: 图 48
1.3.5 HWI设置HWI(硬中断)中包含HWI_INT4到HWI_INT15可用来定义用户自己的硬件中断,HWI_RESET、HWI_NMI和HWI_RESERVED不要去改动。如图 49,每个硬HWI的优先级从上到下逐渐降低。 图 49 选择HWI_INT10为例,来设置EMAC/MDIO的中断,需要填写中断事件号17,并且填写中断服务程序名(C函数前面需要加下划线)如图 50所示: 图 50 在Dispatcher页面,选择“Use Dispatcher”由BIOS代理控制中断的确认和清除,不需要用户中断服务程序干预,比较简便。如图 51: 图 51
1.3.6 SWI设置SWI(软中断)的优先级在HWI之后,但是比TSK高,可以通过右键菜单中的“Insert SWI”创建一个SWI对象,可以指定SWI内部优先级,从0(最低)到14(最高)。如图 52: 图 52
1.3.7 TSK设置在TSK Manager(任务管理器)中可以根据需要创建各种任务,任务间是根据优先级抢占策略来进行调度的,TSK提供有多种优先级别,包括-1(Suspend)、0(Idle)、1(最低)到15(最高)。如图 53: 图 53 在TSK Manager上右键选择“Insert TSK”并填写任务名称后就可以创建一个任务,在相应任务上右键选择“Properties”可对任务属性进行设置,如图 54: 图 54 Stack Size(最大堆栈大小)和Priority(优先级)需要根据任务的具体情况进行设置。在页面,填写任务实体函数名(C函数前面加一个下划线),如图 55: 图 55
1.3.8 Synchronization设置DSP/BIOS中任务间的通信和同步可由SEM、MBX、QUE、LCK四个模块完成: ? SEM(信号量):用于任务同步和互斥,有计数功能,根据需要使用; ? MBX(邮箱):也用于任务同步,可以传递少量数据,根据需要使用; ? QUE(队列):可实现任务同步和资源的共享,根据需要使用; ? LCK(资源锁):实现对共享资源的互斥,根据需要使用。 四种同步模块对象都可以通过各自的右键菜单中“Insert …”来创建,并可对其属性作相应的设置。如图 56所示: 图 56
1.3.9 Input/Output设置这里可以设置一些输入/输出相关的高级设置,具体可通过CCS的帮助项来了解。一般不需要进行设置。只有RTDX(实时数据交换),需要根据目标环境的情况对数据交换模式进行一下选择,用来在调试中主机和目标机进行数据交换。可以是仿真器环境的JTAG模式,或者是模拟器环境的Simulator模式。如图 57所示: |