图像增强序列——LIME: A Method for Low-light IMage Enhancement(LIME模型,2017CVPR)
1. 参考文献

2. 模型实现
% 论文: LIME: A Method for Low-light Image Enhancement
% 作者:Xiaojie Guo
% 链接:
% Author: HSW
% Date: 2018-04-27
clc;
close all;
clear;
addpath(genpath('removeHaze\'));
addpath(genpath('BM3D\'));
% img = imread('timg1.png');
img = imread('timg2.png');
% img = imread('timg3.png');
% img = imread('timg4.png');
figure;
imshow(img, []);
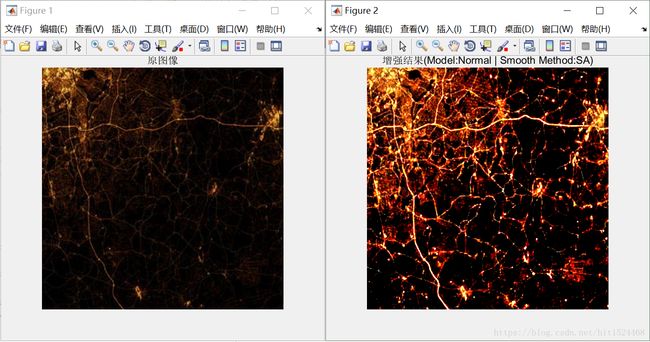
title('原图像');
Model = 'Normal'; % 'Dehaze' / 'Normal'
method = 'SA';
denoiseFlag = 0; % = 0时表示不进行噪声处理; = 1时表示进行噪声处理
if size(img, 3) == 3
img_in = im2double(img);
img_out = Lime_enhance(img_in, Model, method, 0, 0);
figure;
imshow(img_out, []);
title(['增强结果(', 'Model:', Model, ' | Smooth Method:', method, ')']);
else
disp('LIME模型处理彩色图像');
end
2.1 LIME模型相关代码
function T = Illumination(L, method)
% Inputs:
% L:
% Outputs:
% T:
if strcmp(method, 'max_c') == 1
T = max(L, [], 3);
elseif strcmp(method, 'min_c') == 1
T = min(L, [], 3);
end
end
function T_out = Illumination_filter(T_in, method, ksize, sigma1, sigma2, alpha, sharpness, maxIter)
% Inputs:
% T_in:
% ksize: 窗口的大小为ksize x ksize
% method:
% sigma1:
% sigma2:
% alpha:
% sharpness:
% maxIter:
% Outputs:
% T_out:
%
% Author: HSW
% Date: 2018-04-27
%
if ~exist('method','var')
method = 'Max';
end
if strcmp(method, 'Max') == 1
if ~exist('ksize','var')
ksize = 5;
end
elseif strcmp(method, 'Mean') == 1
if ~exist('ksize','var')
ksize = 5;
end
elseif strcmp(method, 'BF') == 1
if ~exist('ksize','var')
ksize = 5;
end
if ~exist('sigma1','var')
sigma1 = 5;
end
if ~exist('sigma2','var')
sigma2 = 7;
end
elseif strcmp(method, 'TV') == 1
if ~exist('alpha','var')
alpha = 0.15;
end
if ~exist('maxIter','var')
maxIter = 50;
end
elseif strcmp(method, 'SA') == 1
if ~exist('alpha','var')
alpha = 0.15;
end
if ~exist('sigma1','var')
sigma1 = 5;
end
if ~exist('sharpness', 'var')
sharpness = 0.02;
end
if ~exist('maxIter','var')
maxIter = 4;
end
end
if strcmp(method, 'Max') == 1
% 局部极大值
T_out = filter_Max(T_in, ksize);
elseif strcmp(method, 'Mean') == 1
T_out = filter_Mean(T_in, ksize);
elseif strcmp(method, 'BF') == 1
% 双边滤波
T_out = filter_BF(T_in, ksize, sigma1, sigma2);
elseif strcmp(method, 'TV') == 1
T_out = filter_TV(T_in, alpha, maxIter);
elseif strcmp(method, 'SA') == 1
T_out = filter_SA(T_in, alpha, sigma1, sharpness, maxIter);
end
end
function T_out = filter_Max(T_in, ksize)
% Inputs:
% T_in:
% ksize:
% Outputs:
% T_out:
% Author: HSW
% Date: 2018-04-27
%
[m, n] = size(T_in);
hsize = floor(ksize / 2);
T_out = T_in;
for i = 1:m
for j = 1:n
patch = T_in(max(1, i - hsize):min(m, i + hsize), max(1, j - hsize):min(n, j + hsize));
T_out(i,j) = max(max(patch));
end
end
disp('run filter_max');
end
function T_out = filter_Mean(T_in, ksize)
% Inputs:
% T_in:
% ksize:
% Outputs:
% T_out:
% Author: HSW
% Date: 2018-04-27
%
[m, n] = size(T_in);
hsize = floor(ksize / 2);
T_out = T_in;
for i = 1:m
for j = 1:n
patch = T_in(max(1, i - hsize):min(m, i + hsize), max(1, j - hsize):min(n, j + hsize));
T_out(i,j) = mean(mean(patch));
end
end
disp('run filter_mean');
end
function T_out = filter_BF(T_in, ksize, sigma1, sigma2)
% Inputs:
% T_in:
% ksize:
% sigma1:
% sigma2:
% Outputs:
% T_out:
% Author: HSW
% Date: 2018-04-27
%
[m, n] = size(T_in);
hsize = floor(ksize / 2);
T_out = T_in;
xx = -hsize : hsize;
yy = -hsize : hsize;
kernel1 = zeros(ksize, ksize);
for ii = 1:ksize
for jj = 1:ksize
kernel1(ii, jj) = exp(-(xx(ii) * yy(jj) / sigma1)^2);
end
end
kernel1 = kernel1 ./ sum(sum(kernel1)); % 归一化
for i = hsize + 1:m - hsize
for j = hsize + 1:n - hsize
kernel2 = exp(-((T_in(i - hsize : i + hsize, j - hsize:j + hsize) - repmat(T_in(i,j), ksize, ksize)) ./ sigma2).^2);
kernel2 = kernel2 ./ sum(sum(kernel2));
T_out(i,j) = sum(sum(kernel1 .* kernel2 .* T_in(i - hsize : i + hsize, j - hsize : j + hsize) ./ sum(sum(kernel1 .* kernel2))));
end
end
end
function T_out = filter_TV(T_in, alpha, maxIter)
% Inputs:
% T_in:
% alpha:
% maxIter:
% Outputs:
% T_out:
% Author: HSW
% Date: 2018-04-27
%
epsilon = 0.00001;
dt = 0.1;
J = T_in;
for iter = 1:maxIter
DfJx=J([2:end end],:)-J; %函数关于X的一阶偏导(向后差分)
DbJx=J-J([1 1:end-1],:); %函数关于X的一阶偏导(向前差分)
DfJy=J(:,[2:end end])-J; %函数关于Y的一阶偏导(向后差分)
DbJy=J-J(:,[1 1:end-1]); %函数关于Y的一阶偏导(向前差分)
TempDJx=(epsilon+DfJx.*DfJx+((sign(DfJy)+sign(DbJy)).*min(abs(DfJy),abs(DbJy))./2).^2).^(1/2);%求梯度的模
TempDJy=(epsilon+DfJy.*DfJy+((sign(DfJx)+sign(DbJx)).*min(abs(DfJx),abs(DbJx))./2).^2).^(1/2);
DivJx=DfJx./(TempDJx + (TempDJx == 0) * epsilon);
DivJy=DfJy./(TempDJy + (TempDJy == 0) * epsilon);
%求散度
Div=DivJx-DivJx([1 1:end-1],:)+DivJy-DivJy(:,[1 1:end-1]);
J= J + dt * alpha* Div - dt * (J-T_in); %产生迭代
end
T_out = J;
end
function T_out = filter_SA(T_in, alpha, sigma, sharpness, maxIter)
% Inputs:
% T_in:
% alpha:
% sigma:
% maxIter:
% sharpness:
% Outputs:
% T_out:
% Author: HSW
% Date: 2018-04-27
%
% 论文描述的解法没有完全理解,就按照论文中的文献[17]的迭代法进行实现,只是不迭代更新Wh 和 Wv
T_out = tsmooth(T_in, alpha, sigma, sharpness, maxIter);
end
function S = tsmooth(I,lambda,sigma,sharpness,maxIter)
% 参考代码: https://blog.csdn.net/songzitea/article/details/12851723#
if (~exist('lambda','var'))
lambda=0.01;
end
if (~exist('sigma','var'))
sigma=3.0;
end
if (~exist('sharpness','var'))
sharpness = 0.02;
end
if (~exist('maxIter','var'))
maxIter=4;
end
I = im2double(I);
x = I;
sigma_iter = sigma;
lambda = lambda/2.0;
dec=2.0;
[wx, wy] = computeTextureWeights(x, sigma_iter, sharpness); % 与文献[17]不同,文献[17]每次迭代都改变wx, wy
for iter = 1:maxIter
% [wx, wy] = computeTextureWeights(x, sigma_iter, sharpness);
x = solveLinearEquation(I, wx, wy, lambda);
sigma_iter = sigma_iter/dec;
if sigma_iter < 0.5
sigma_iter = 0.5;
end
end
S = x;
end
function [retx, rety] = computeTextureWeights(fin, sigma,sharpness)
fx = diff(fin,1,2);
fx = padarray(fx, [0 1 0], 'post');
fy = diff(fin,1,1);
fy = padarray(fy, [1 0 0], 'post');
vareps_s = sharpness;
vareps = 0.001;
wto = max(sum(sqrt(fx.^2+fy.^2),3)/size(fin,3),vareps_s).^(-1);
fbin = lpfilter(fin, sigma);
gfx = diff(fbin,1,2);
gfx = padarray(gfx, [0 1], 'post');
gfy = diff(fbin,1,1);
gfy = padarray(gfy, [1 0], 'post');
wtbx = max(sum(abs(gfx),3)/size(fin,3),vareps).^(-1);
wtby = max(sum(abs(gfy),3)/size(fin,3),vareps).^(-1);
retx = wtbx.*wto;
rety = wtby.*wto;
retx(:,end) = 0;
rety(end,:) = 0;
end
function ret = conv2_sep(im, sigma)
ksize = bitor(round(5*sigma),1);
g = fspecial('gaussian', [1,ksize], sigma);
ret = conv2(im,g,'same');
ret = conv2(ret,g','same');
end
function FBImg = lpfilter(FImg, sigma)
FBImg = FImg;
for ic = 1:size(FBImg,3)
FBImg(:,:,ic) = conv2_sep(FImg(:,:,ic), sigma);
end
end
function OUT = solveLinearEquation(IN, wx, wy, lambda)
[r,c,ch] = size(IN);
k = r*c;
dx = -lambda*wx(:);
dy = -lambda*wy(:);
B(:,1) = dx;
B(:,2) = dy;
d = [-r,-1];
A = spdiags(B,d,k,k);
e = dx;
w = padarray(dx, r, 'pre'); w = w(1:end-r);
s = dy;
n = padarray(dy, 1, 'pre'); n = n(1:end-1);
D = 1-(e+w+s+n);
A = A + A' + spdiags(D, 0, k, k);
if exist('ichol','builtin')
L = ichol(A,struct('michol','on'));
OUT = IN;
for ii=1:ch
tin = IN(:,:,ii);
[tout, flag] = pcg(A, tin(:),0.1,100, L, L');
OUT(:,:,ii) = reshape(tout, r, c);
end
else
OUT = IN;
for ii=1:ch
tin = IN(:,:,ii);
tout = A\tin(:);
OUT(:,:,ii) = reshape(tout, r, c);
end
end
end
function img_out = Lime_enhance(img_in, Model, method, denoiseFlag, displayFlag)
% Inputs:
% Model: 'Normal' 论文公式(1)模型, 'Dehaze'论文公式(2)模型
% method: 'Max' / 'Mean' / 'BF' / 'TV' / 'SA'
% Outputs:
% img_out:
%
epsilon = 0.0001;
[m, n, dims] = size(img_in);
if strcmp(Model, 'Normal') == 1
% 估计光照亮度
T = Illumination(img_in, 'max_c'); % 亮通道
if displayFlag
figure;
imshow(T,[]);
title('T');
end
% 亮通道光滑
smoothT = Illumination_filter(T, method);
if displayFlag
figure;
imshow(smoothT, []);
title('smoothT');
end
% gama变换
gama = 0.8;
gamaT = smoothT.^gama;
if displayFlag
figure;
imshow(gamaT, []);
title('gamaT');
end
% I = img_in ./ repmat((gamaT + (gamaT == 0) * epsilon), [1, 1, 3]);
I = 1 - ((ones([m, n, dims]) - img_in) - repmat(0.95 * (1 - gamaT), [1, 1, 3])) ./ repmat((gamaT + (gamaT == 0) * epsilon), [1, 1, 3]);
I(I < 0) = 0;
I(I > 1) = 1;
if displayFlag
figure;
imshow(I, []);
title('未除噪增强图像');
end
% 进行噪声处理
if denoiseFlag == 1
I_noise = uint8(I .* 255);
I_YCbCr = rgb2ycbcr(I_noise);
Y = I_YCbCr(:, :, 1);
maxY = max(max(Y));
minY = min(min(Y));
% BM3D去噪
Y_denoise = BM3D(Y, 0, 5, 1, 1);
maxY_denoise = max(max(Y_denoise));
minY_denoise = min(min(Y_denoise));
Y_denoise = (double(Y_denoise) - double(minY_denoise)) ./ double(maxY_denoise - minY_denoise) .* double(maxY - minY) + double(minY);
I_YCbCr(:, :, 1) = Y_denoise;
I_denoise = ycbcr2rgb(I_YCbCr);
I_denoise = double(I_denoise) ./ 255.;
% 图像融合
I = double(I) .* double(repmat(gamaT, [1, 1, 3])) + double(I_denoise) .* double(repmat((1 - gamaT), [1, 1, 3]));
end
elseif strcmp(Model, 'Dehaze') == 1
img_in = 1 - img_in;
ksize = 5;
[img_in, I, J, T_est, T, A] = removeHaze(img_in,ksize);
I = 1 - I;
end
img_out = I;
end2.2 RemoveHaze文件夹代码
function T_colored = colorTransmission( T )
%COLORTRANSMISSION Summary of this function goes here
% Detailed explanation goes here
t = size(T);
T_colored = zeros(t(1), t(2), 3);
maxT = max(max(max(T)));
minT = min(min(min(T)));
avg = (maxT + minT)/2;
T_colored(:,:,1) = T > ( maxT - avg/2 );
T_colored(:,:,2) = ((minT+avg/2) < T) .* (T < (maxT-avg/2));
T_colored(:,:,3) = T < minT+avg/2;
end
function A = estimateA( I, J, numPixels )
%ESTIMATEA Summary of this function goes here
% Detailed explanation goes here
% Make a list of the brightest pixels
brightestJ = zeros(numPixels,3);
[x_dim y_dim] = size(J);
for i = 1:x_dim
for j = 1:y_dim
[minElement, index] = min(brightestJ(:,3));
if J(i,j) > minElement
brightestJ(index,:) = [i j J(i,j)];
end
end
end
% Find the highest intensity pixel from the original Image using the
% list calculated above
highestIntensity = zeros(1,3);
for i = 1:numPixels
x = brightestJ(i,1);
y = brightestJ(i,2);
intensity = sum(I(x,y,:));
if intensity > sum(highestIntensity)
highestIntensity = I(x,y,:);
end
end
% Set as the Atmosphere lighting
dimI = size(I);
if numel(dimI) == 3
A = zeros(x_dim,y_dim,3);
for a = 1:dimI(3)
A(:,:,a) = A(:,:,a) + highestIntensity(:,:,a);
end
else
A = zeros(x_dim,y_dim);
A(:,:) = A(:,:) + highestIntensity(:,:);
end
end
function [ T ] = generateLaplacian( I, T_est)
%GENERATELAPLACIAN2 Summary of this function goes here
% Detailed explanation goes here
dimI = size(I);
% Taking a box around the pixel
win_size = 1;
win_pixels = 9;
% As per equation in paper when computing the laplacian
% U is to be added to the window covariance
U = .000001 ./win_pixels.*eye(3);
windowIndicies = 1:dimI(1)*dimI(2);
windowIndicies = reshape(windowIndicies,dimI(1),dimI(2));
totalElements = win_pixels^2 * ( dimI(1) - 2 ) * ( dimI(2) - 2 );
indicies_x = ones(1,totalElements);
indicies_y = ones(1,totalElements);
elements = zeros(1,totalElements);
count = 0;
for i = (1+win_size):(dimI(2)-win_size)
for j = (1+win_size):(dimI(1)-win_size)
% Get the window around i and j
rangeI = i-win_size:i+win_size;
rangeJ = j-win_size:j+win_size;
window = I(rangeJ, rangeI,:);
% Convert to a vector
% each column representing a color
window_vector = reshape(window,win_pixels,3);
% Calculate the mean and difference
window_mean = mean(window_vector)';
diff = window_vector' - repmat(window_mean,1,win_pixels);
% both methods of computing covariant produce the same results
window_covariance = (diff*diff'/win_pixels)+U;
%window_covariance = (window_vector'*window_vector/win_pixels - window_mean*window_mean')+U;
% Compute the elements in the L matrix
% easier to just store these in a spares matrix
L_element = eye(win_pixels) - (1 + diff' * inv(window_covariance) * diff) ./ win_pixels;
L_element = (L_element(:))'; % reshape it to a single vector
% Calculate the cordinates in the L matrix that we are dealing
% with. [ coordinates required in a sparse matrix ]
% Step 1. Get the indicies of the current window
window_indicies = reshape(windowIndicies(rangeJ,rangeI),1,win_pixels);
% Step 2. Create all combinations of pixels
x = repmat(window_indicies,win_pixels,1);
y = x';
% reformat combination of pixels
x = (x(:))';
y = (y(:))';
indicies_x((count*(win_pixels^2) + 1):(count*(win_pixels^2)+(win_pixels^2))) = x;
indicies_y((count*(win_pixels^2) + 1):(count*(win_pixels^2)+(win_pixels^2))) = y;
elements((count*(win_pixels^2) + 1):(count*(win_pixels^2)+(win_pixels^2))) = L_element;
count = count + 1;
end
end
L = sparse(indicies_x,indicies_y,elements,dimI(1)*dimI(2),dimI(1)*dimI(2));
T = (L + .0001 .* speye(size(L))) \ T_est(:) .* .0001;
T = reshape(T, size(T_est));
end
function J = makeDarkChannel( I, patch_size )
% Assuming that this is RGB but overall not requiring it
[image_x image_y channels] = size(I);
J = zeros(image_x,image_y);
tmpPatch = double(zeros(2*floor(patch_size/2),2*floor(patch_size/2),channels));
I = padarray(I, [floor(patch_size/2) floor(patch_size/2)], 'symmetric');
% I think the size actually returns in order [y x ~ but doesn't really
% matter as long as order is kept
% padarray resizes the example 300x400 to 314x414.
% Use original image_x, image_y and add 2*floor(patch_size/2)
for i = 1:image_x
minX = i;
maxX = (i + 2*floor(patch_size/2));
for j = 1:image_y
minY = j;
maxY = (j + 2*floor(patch_size/2));
% copy all color channels over
tmpPatch = I(minX:maxX, minY:maxY,:);
J(i,j) = min(tmpPatch(:)); % find min across all channels
end
end
end
%function [I J T A L] = removeHaze( imageName, patch_size )
function [I I_out J T_est T A] = removeHaze( I, patch_size )
% Used to make image more realistic due to seeming unbelievable
% when there is no sense of depth
aerialPerspective = 0.95;
% Make grayscales to color
if numel(size(I)) == 2
[x y] = size(I);
tmpI = zeros(x,y,3);
for c = 1:3
tmpI(:,:,c) = I;
end
I = tmpI;
end
J = makeDarkChannel(I,patch_size);
% Section 4.4
% Estimate Atmosphere
% We first pick the top 0.1% bright- est pixels in the dark channel.
% These pixels are most haze- opaque (bounded by yellow lines in
% Figure 6(b)). Among these pixels, the pixels with highest intensity
% in the input image I is selected as the atmospheric light.
% TL;DR TAKE .1% of the brightest pixels
dimJ = size(J);
numBrightestPixels = ceil(0.001 * dimJ(1) * dimJ(2)); % Use the cieling to overestimate number needed
A = estimateA(I,J,numBrightestPixels);
% Section 4.1
% Estimate the Transmission Equation 12
T_est = 1 - aerialPerspective*makeDarkChannel(I./A,patch_size);
[T] = generateLaplacian(I,T_est);
dehazed = zeros(size(I));
% Equation 16
for c = 1:3
dehazed(:,:,c) = (I(:,:,c) - A(:,:,c))./(max(T, .1)) + A(:,:,c);
end
I_out = dehazed;
beep
end
2.3 BM3D文件夹相关代码
function img_out = BM3D(img_in, tran_mode, sigma, displayMidResult, displayProcess)
% 参考文献: 《Image denoising by sparse 3D transform-domain collaborative filtering》
% 《An Analysis and Implementation of the BM3D Image Denoising Method》
% Inputs:
% img_in: 噪声图像,必须为矩形方阵
% tran_mode: = 0, fft; = 1, dct; = 2, dwt, = 3, db1
% displayMidResult: 0/1
% displayProcess: 0/1
% Outputs:
% img_out: 去噪图像
% 代码下载链接: http://www.pudn.com/Download/item/id/2703664.html
%
%
if ~exist('tran_mode', 'var')
tran_mode = 0;
end
if ~exist('sigma', 'var')
sigma = 10;
end
if ~exist('displyaMidResult', 'var')
displayMidResult = 0;
end
if ~exist('displayProcess', 'var')
displayProcess = 0;
end
img_noise = img_in;
[row,col] = size(img_noise);
tic
% first step
kHard=8; % 块大小
pHard=4; % 块移动间隔
lambda_distHard=0;% 求相似的距离时,变换后,收缩的阈值
nHard=40; % 搜索窗口大小
NHard=28; % 最多相似块个数
tauHard=5000; % 最大的相似距离for fft
beta=2;
% tauHard=50000;% for dct
if(tran_mode==0) %fft
lambda2d=400;
lambda1d=500;
lambda2d_wie=50;
lambda1d_wie=500;
elseif(tran_mode == 1) %dct
lambda2d=50;
lambda1d=80;
lambda2d_wie=20;
lambda1d_wie=60;
elseif(tran_mode == 2) %dwt
lambda2d=50;
lambda1d=80;
lambda2d_wie=20;
lambda1d_wie=60;
end
%kaiser 窗,实际代码中可能没有用到。
kaiser_win=kaiser(kHard,1)*kaiser(kHard,1)';
%图像分块,并且做变换,为找相似块做准备
[block,tran_block,block2row_idx,block2col_idx]=im2block(img_noise,kHard,pHard,lambda_distHard,0);
% block number row:行方向上的 块的个数
bn_r=floor((row-kHard)/pHard)+1;
bn_c=floor((col-kHard)/pHard)+1;
%基础估计的图像
img_basic_sum=zeros(row,col);
img_basic_weight=zeros(row,col);
%显示处理进度
is_disp_process = displayProcess;
process_step_total = bn_r/10;
process_step_cnt = 0;
%基础估计
fprintf('BM3D: First Stage Start...\n');
%对每个块遍历
for i=1:1:bn_r
if((is_disp_process) &&(i>process_step_total))
process_step_total=process_step_total+bn_r/10;
process_step_cnt=process_step_cnt+1;
fprintf(' process:%d/10\n',process_step_cnt)
end
for j=1:1:bn_c
[sim_blk,sim_num,sim_blk_idx]=search_similar_block(i,j,block,tran_block,kHard,floor(nHard/pHard),...
bn_r,bn_c,tauHard,NHard);
%toc
% test fine_similar block
num_sim=size(sim_blk_idx,3);
%tic
%做3D变换,并且用阈值收缩
tran3d_blk_shrink=transform_3d(sim_blk,tran_mode,lambda2d,lambda1d);
%toc
NHard_P=nnz(tran3d_blk_shrink);%non_zero_num
if(NHard_P >1)
wHard_P=1/NHard_P;
else
wHard_P=1;
end
Wwin2D= kaiser(kHard, beta) * kaiser(kHard, beta)'; % Kaiser window used in the hard-thresholding part
wWien_P=Wwin2D*wHard_P;
%wHard_P=wHard_P*kaiser_win;% 要不要?
%tic
% 3D逆变换
blk_est=inv_transform_3d(tran3d_blk_shrink,tran_mode);
%pause
%可能是复数,虚部为0或接近于0,所以只取实部
%max(abs(imag(blk_est(:))))
blk_est=real(blk_est);
%toc
%tic
for k=1:sim_num
idx=sim_blk_idx(k);
ir=block2row_idx(idx);
jr=block2col_idx(idx);
%实在算不清了。利用提前保存好 块索引和左上角坐标的 对应关系
%ir=floor((idx-1)*pHard/col)+1;
%jr=(idx-1)*pHard-(i-1)*col+1;
img_basic_sum(ir:ir+kHard-1,jr:jr+kHard-1)=...
img_basic_sum(ir:ir+kHard-1,jr:jr+kHard-1)+wHard_P*blk_est(:,:,k);
img_basic_weight(ir:ir+kHard-1,jr:jr+kHard-1)=...
img_basic_weight(ir:ir+kHard-1,jr:jr+kHard-1)+wHard_P;
end
%toc
%pause
end
end
fprintf('BM3D: First Stage End...\n');
img_basic=img_basic_sum./img_basic_weight;
if displayMidResult
figure;
imshow(img_basic,[]);
title('BM3D:Fist Stage Result');
% psnr=20*log10(255/sqrt(mean((img_basic(:)-img(:)).^2)))
end
% second step
kWien=kHard;
pWien=pHard;
lambda_distWien=lambda_distHard;
nWien=nHard;%搜索窗口大小
NWien=NHard;%最多相似块个数
tauWien=tauHard;
sigma2=sigma*sigma;
[block_basic,tran_block_basic,block2row_idx_basic,block2col_idx_basic]=im2block(img_basic,kWien,pWien,lambda_distWien,0);
bn_r=floor((row-kWien)/pWien)+1;
bn_c=floor((col-kWien)/pWien)+1;
img_wien_sum=zeros(row,col);
img_wien_weight=zeros(row,col);
process_step_total=bn_r/10;
process_step_cnt=0;
fprintf('BM3D: Second Stage Start...\n');
for i=1:1:bn_r
if((is_disp_process) &&(i>process_step_total))
process_step_total=process_step_total+bn_r/10;
process_step_cnt=process_step_cnt+1;
fprintf(' process:%d/10\n',process_step_cnt)
end
for j=1:1:bn_c
[sim_blk_basic,sim_num,sim_blk_basic_idx]=search_similar_block(i,j,block_basic,tran_block_basic,kWien,floor(nWien/pWien),...
bn_r,bn_c,tauWien,NWien);
%对基础块进行3D变换,求得omega_P.
tran3d_blk_basic=transform_3d(sim_blk_basic,tran_mode,lambda2d_wie,lambda1d_wie);
omega_P=(tran3d_blk_basic.^2)./((tran3d_blk_basic.^2)+sigma2);
%用 基础块得到的相似块的索引,来找到 噪声块的相似块,并进行3D变换
tran3d_blk=transform_3d(block(:,:,sim_blk_basic_idx),tran_mode,lambda2d_wie,lambda1d_wie);
blk_est=inv_transform_3d(omega_P.*tran3d_blk,tran_mode);
%可能是复数,虚部为0或接近于0,所以只取实部
%max(abs(imag(blk_est(:))))
blk_est=real(blk_est);
NWien_P=nnz(omega_P); %IPOL文中8式中矩阵范数?应该如何求??
if(NWien_P >1)
wWien_P=1/(NWien_P);
else
wWien_P=1;
end
% wWien_P=wWien_P/sigma2;
for k=1:sim_num
idx=sim_blk_basic_idx(k);
ir=block2row_idx_basic(idx);
jr=block2col_idx_basic(idx);
img_wien_sum(ir:ir+kWien-1,jr:jr+kWien-1)=...
img_wien_sum(ir:ir+kWien-1,jr:jr+kWien-1)+wWien_P*blk_est(:,:,k);
img_wien_weight(ir:ir+kWien-1,jr:jr+kWien-1)=...
img_wien_weight(ir:ir+kWien-1,jr:jr+kWien-1)+wWien_P;
end
end
end
fprintf('BM3D: Second Stage End\n');
img_wien=img_wien_sum./img_wien_weight;
if displayMidResult
figure;
imshow(img_wien,[]);
title('BM3D: 去噪结果');
% psnr=20*log10(255/sqrt(mean((img_wien(:)-img(:)).^2)))
end
img_out = img_wien;
toc% 图像分块,并且做变换,为找相似块做准备
% k:块大小,p:块移动步长,lambda2D,delta 收缩阈值
% block 返回的块,transform_block 变换后的块
% block2row_idx,block2col_idx 为保存的 块索引 与 块左上角在图像中坐标的 对应关系
function [block,transform_block,block2row_idx,block2col_idx] =im2block(img,k,p,lambda2D,delta)
[row,col]=size(img);
%这个阈值该用什么公式呢??
thres=lambda2D*delta*sqrt(2*log(row*col));
% r_num:行方向 上 应该有 多少个块
r_num=floor((row-k)/p)+1;
c_num=floor((col-k)/p)+1;
block=zeros(k,k,r_num*c_num);
block2row_idx=[];
block2col_idx=[];
cnt=1;
for i=0:1:r_num-1
rs=1+i*p;
for j=0:1:c_num-1
cs=1+j*p;
block(:,:,cnt)=img(rs:rs+k-1,cs:cs+k-1);
block2row_idx(cnt)=rs;
block2col_idx(cnt)=cs;
%该用什么变换呢??
tr_b=fft2(block(:,:,cnt));
% tr_b=dct2(block(:,:,cnt));
idx=find(abs(tr_b) % 3D逆变换
function [blk_est]=inv_transform_3d(blk_tran3d,tran_mode)
global blk_tran1d_s;
global blk_2d_s;
[m,n,blk_num]=size(blk_tran3d);
blk_invtran1d=zeros(m,n,blk_num);
blk_est=zeros(m,n,blk_num);
if(tran_mode==0) %fft
for i=1:1:m
for j=1:1:n
blk_invtran1d(i,j,:)=ifft(blk_tran3d(i,j,:));
end
end
for i=1:1:blk_num
blk_est(:,:,i)=ifft2(blk_invtran1d(:,:,i));
end
elseif(tran_mode==1) %dct
for i=1:1:m
for j=1:1:n
blk_invtran1d(i,j,:)=idct(blk_tran3d(i,j,:));
end
end
for i=1:1:blk_num
blk_est(:,:,i)=idct2(blk_invtran1d(:,:,i));
end
elseif(tran_mode==2) %dwt
blk_num=length(blk_2d_s);
blk_c=waverec2(blk_tran3d,blk_tran1d_s,'haar');
blk_est=[];
for i=1:1:blk_num
blk_est(:,:,i)=waverec2(blk_c(:,i),blk_2d_s{i},'Bior1.5');
end
else
error('tran_mode error');
end% 搜索相似块
% ik,jk: 块的左上角 坐标。
%bn_r: block_num_row,分块之后,沿着行的方向上有多少个块。
%用 tran_block 来算距离,得到的sim_blk 却是来自block.
%np: 搜索窗口的大小/块移动步距。
% tau: 最大相似距离
% max_sim_num: 最多相似块 个数
function [sim_blk,sim_num,sim_blk_idx]=search_similar_block(ik,jk,block,tran_block,k,np,bn_r,bn_c,tau,max_sim_num)
% 搜索窗口的 左上角 和 右下角 的块的坐标。s,e:start,end.
in_s=max(ik-floor(np/2),1);
jn_s=max(jk-floor(np/2),1);
in_e=min(ik+floor(np/2),bn_r);
jn_e=min(jk+floor(np/2),bn_c);
% 当前参考块
ref_blk=tran_block(:,:,((ik-1)*bn_c+jk));
k2=k*k;
cnt=0;
%dist=[];
%blk_idx=[];
%如果参考块在图像的边缘,那它周围的搜索区域就不会是完整的n*n
%所以不能单纯的由cnt 反推出idx.
%for ii=in_s:1:in_e
% for jj=jn_s:1:jn_e
% cnt=cnt+1;
% %idx=ii*bn_c+jj;
% idx=(ii-1)*bn_c+(jj-1)+1;
% cur_blk=tran_block(:,:,idx);
% blk_idx(cnt)=idx;
% dist(cnt)=norm(cur_blk-ref_blk);% 只是比较大小,就没必要归一化了 /k2;
% end
%end
%下面找相似块的方法要比上面的快一些
ii=in_s:1:in_e;
jj=jn_s:1:jn_e;
[II,JJ]=meshgrid(ii,jj);
IDX=(II-1)*bn_c+JJ;
blk_idx=IDX(:);
cur_blk=tran_block(:,:,blk_idx);
cnt=size(cur_blk,3);
ref_blk_mat=repmat(ref_blk,[1,1,cnt]);
% shit! 要不要用norm ? 奇异值能衡量矩阵的相似程度?
% norm(cur_blk-ref_blk_mat);
delta_blk=cur_blk-ref_blk_mat;
dist=sum(sum(delta_blk.*delta_blk,1),2);
% 排序,找到最相似的块
[dist_sort,dist_idx]=sort(dist);
max_num=min(cnt,max_sim_num);%可能当前块中个数还没有max_sim_num多
if(dist_sort(max_num) % 阈值收缩,abs小于thres的 赋值 0
function [val]=thres_shrink(data,thres)
val=data;
idx=find(abs(data)% 3D变换,先进行 2D变换,用lambda2d阈值收缩,然后进行1D变换,
% lambda1d 阈值收缩。
function blk_tran3d=transform_3d(blk_3d,tran_mode,lambda2d,lambda1d)
global blk_tran1d_s;
global blk_2d_s;
[m,n,blk_num]=size(blk_3d);
%变换不同时,可能需要修改??
blk_2d_shrink=zeros(m,n,blk_num);
blk_1d_shrink=zeros(m,n,blk_num);
%(strcmp(tran_mode,'fft'))
if(tran_mode==0) %fft
for i=1:1:blk_num
blk_tran2d=fft2(blk_3d(:,:,i));
blk_2d_shrink(:,:,i)=thres_shrink(blk_tran2d,lambda2d);
end
for i=1:1:m
for j=1:1:n
blk_tran1d=fft(blk_2d_shrink(i,j,:));
blk_1d_shrink(i,j,:)=thres_shrink(blk_tran1d,lambda1d);
end
end
blk_tran3d=blk_1d_shrink;
%test 这是为了测试 还能否反变换回来。
%blk_invtran1d=zeros(m,n,blk_num);
%blk_est=zeros(m,n,blk_num);
%for i=1:1:m
% for j=1:1:n
% blk_invtran1d(i,j,:)=ifft(blk_tran3d(i,j,:));
% end
%end
%for i=1:1:blk_num
% blk_est(:,:,i)=ifft2(blk_invtran1d(:,:,i));
%end
elseif(tran_mode==1) %dct
for i=1:1:blk_num
blk_tran2d=dct2(blk_3d(:,:,i));
blk_2d_shrink(:,:,i)=thres_shrink(blk_tran2d,lambda2d);
end
for i=1:1:m
for j=1:1:n
blk_tran1d=dct(blk_2d_shrink(i,j,:));
blk_1d_shrink(i,j,:)=thres_shrink(blk_tran1d,lambda1d);
end
end
blk_tran3d=blk_1d_shrink;
elseif(tran_mode==2) %dwt
blk_2d_s={};
blk_2d_shrink=[];%zeros()
for i=1:1:blk_num
[blk_tran2d_c,blk_tran2d_s]=wavedec2(blk_3d(:,:,i),2,'Bior1.5');
blk_2d_shrink(:,i)=thres_shrink(blk_tran2d_c,lambda2d);
blk_2d_s{i}=blk_tran2d_s;
end
%这里应该用 wavedec.因为是对1维??
[blk_tran1d_c,blk_tran1d_s]=wavedec2(blk_2d_shrink,1,'haar');
blk_tran3d=thres_shrink(blk_tran1d_c,lambda1d);
% elseif(strcmp(tran_mode,'db1')) %还未实现
% blk_2d_s={};
% blk_2d_shrink=[];%zeros()
% for i=1:1:blk_num
% [blk_tran2d_cA,blk_tran2d_cH,blk_tran2d_cV,blk_tran2d_cD]=...
% dwt2(blk_3d(:,:,i),'db1');
% blk_2d_shrink(:,i)=thres_shrink(blk_tran2d_c,lambda2d);
% blk_2d_s{i}=blk_tran2d_s;
% end
% [blk_tran1d_c,blk_tran1d_s]=wavedec2(blk_2d_shrink,1,'haar');
% blk_tran3d=thres_shrink(blk_tran1d_c,lambda1d);
else
error('tran_mode error');
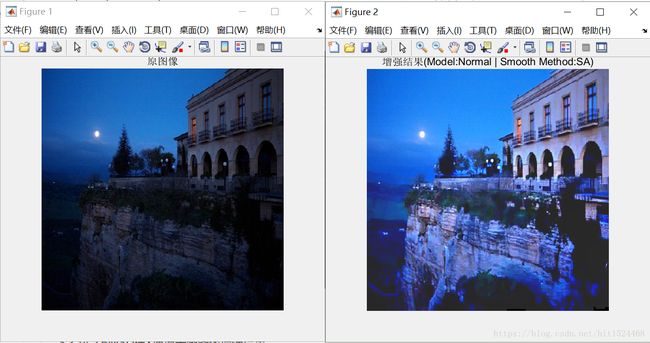
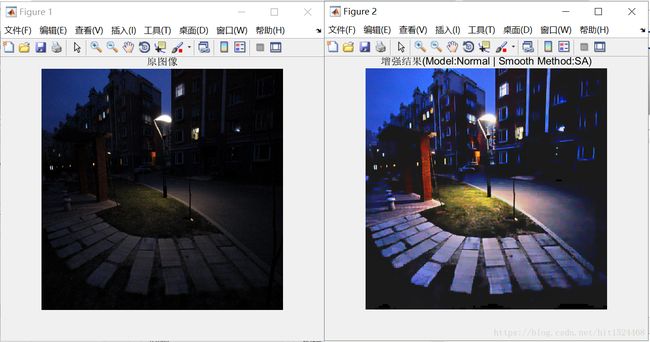
end3. 模型效果
3.1 不包含BM3D在Y通道去噪图像增强结果
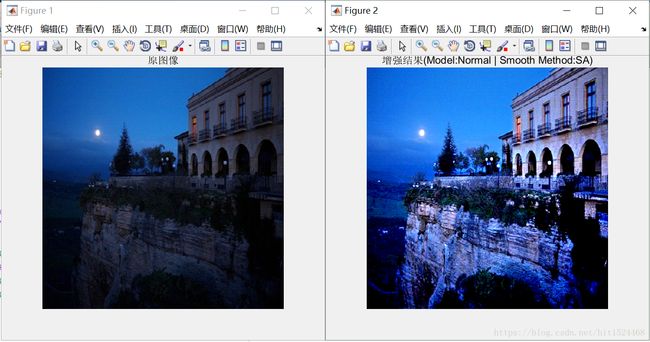
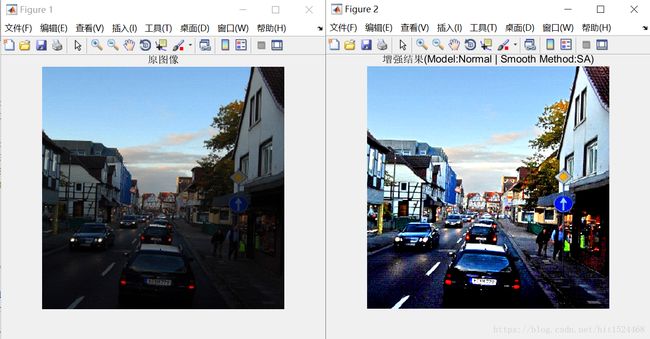

3.2 包含BM3D在Y通道去噪图像增强结果