图像处理中的傅里叶变换
傅立叶变换在图像处理中有非常重要的作用。因为不仅傅立叶分析涉及图像处理很多方面,傅立 叶改进算法,比如离散余弦变换,gabor与小波在图像处理中也有重要的分量。傅立叶变换在图像处理的重要作用:
1.图像增强与图像去噪
绝 大部分噪音都是图像的高频分量,通过低通滤波器来滤除高频——噪声; 边缘也是图像的高频分量,可以通过添加高频分量来增强原始图像的边缘;
2.图像分割之边缘检测
提 取图像高频分量
3.图像特征提取:
形状特征:傅里叶描述子
纹 理特征:直接通过傅里叶系数来计算纹理特征
其他特征:将提取的特征值进行傅里叶变 换来使特征具有平移、伸缩、旋转不变性
4.图像压缩
可以直接通过傅里叶系数来压缩数据;常用的离散余弦变换是傅立叶变换的实变换;傅立叶变换。
傅里叶变换是将 时域信号分解为不同频率的正弦信号或余弦函数叠加之和。连续情况下要求原始信号在一个周期内满足绝对可积条件。离散情况下,傅里叶变换一定存在。冈萨雷斯 版<图像处理>里面的解释非常形象:一个恰当的比喻是将傅里叶变换比作一个玻璃棱镜。棱镜是可以将光分解为不同颜色的物理仪器,每个成分的颜 色由波长(或频率)来决定。傅里叶变换可以看作是数学上的棱镜,将函数基于频率分解为不同的成分。当我们考虑光时,讨论它的光谱或频率谱。同样,傅立叶变 换使我们能通过频率成分来分析一个函数。
傅立叶变换有很多优良的性质。
如线性, 对称性(可以用在计算信号的傅里叶变换里面);
时移性:函数在时域中的时移,对 应于其在频率域中附加产生的相移,而幅度频谱则保持不变;
频移性:函数在时域中乘 以e^jwt,可以使整个频谱搬移w。这个也叫调制定理,通讯里面信号的频分复用需要用到这个特性(将不同的信号调制到不同的频段上同时传输);
卷积定理:时域卷积等于频域乘积;时域乘积等于频域卷积(附加一个系数)。(图像处理里面 这个是个重点)。
信号在频率域的表现。
在频域中,频率越大说明原始信号变化速度越快;频率越小说明原始信号越平缓。当频率为0时,表示直 流信号,没有变化。因此,频率的大小反应了信号的变化快慢。高频分量解释信号的突变部分,而低频分量决定信号的整体形象。
在图像处理中,频域反应了图像在空域灰度变化剧烈程度,也就是图像灰度的变化速度,也就是图像的梯 度大小。对图像而言,图像的边缘部分是突变部分,变化较快,因此反应在频域上是高频分量;图像的噪声大部分情况下是高频部分;图像平缓变化部分则为低频分 量。也就是说,傅立叶变换提供另外一个角度来观察图像,可以将图像从灰度分布转化到频率分布上来观察图像的特征。书面一点说就是,傅里叶变换提供了一条从 空域到频率自由转换的途径。对图像处理而言,以下概念非常的重要:
图像高频分量: 图像突变部分;在某些情况下指图像边缘信息,某些情况下指噪声,更多是两者的混合;
低 频分量:图像变化平缓的部分,也就是图像轮廓信息
高通滤波器:让图像使低频分量抑 制,高频分量通过
低通滤波器:与高通相反,让图像使高频分量抑制,低频分量通过
带通滤波器:使图像在某一部分的频率信息通过,其他过低或过高都抑制
带阻滤波器,是带通的反。
模板运算与卷积定理
在时域内做模板运算,实际上就是对图像进行卷积。 模板运算是图像处理一个很重要的处理过程,很多图像处理过程,比如增强/去噪(这两个分不清楚),边缘检测中普遍用到。根据卷积定理,时域卷积等价与频域 乘积。因此,在时域内对图像做模板运算就等效于在频域内对图像做滤波处理。
比如说 一个均值模板,其频域响应为一个低通滤波器;在时域内对图像作均值滤波就等效于在频域内对图像用均值模板的频域响应对图像的频域响应作一个低通滤波。
图像去噪
图像去噪 就是压制图像的噪音部分。因此,如果噪音是高频额,从频域的角度来看,就是需要用一个低通滤波器对图像进行处理。通过低通滤波器可以抑制图像的高频分量。 但是这种情况下常常会造成边缘信息的抑制。常见的去噪模板有均值模板,高斯模板等。这两种滤波器都是在局部区域抑制图像的高频分量,模糊图像边缘的同时也 抑制了噪声。还有一种非线性滤波-中值滤波器。中值滤波器对脉冲型噪声有很好的去掉。因为脉冲点都是突变的点,排序以后输出中值,那么那些最大点和最小点 就可以去掉了。中值滤波对高斯噪音效果较差。
椒盐噪声:对于椒盐采用中值滤波可以 很好的去除。用均值也可以取得一定的效果,但是会引起边缘的模糊。
高斯白噪声:白 噪音在整个频域的都有分布,好像比较困难。
冈萨雷斯版图像处理P185:算术均值 滤波器和几何均值滤波器(尤其是后者)更适合于处理高斯或者均匀的随机噪声。谐波均值滤波器更适合于处理脉冲噪声。
图像增强
有时候感觉图像增 强与图像去噪是一对矛盾的过程,图像增强经常是需要增强图像的边缘,以获得更好的显示效果,这就需要增加图像的高频分量。而图像去噪是为了消除图像的噪 音,也就是需要抑制高频分量。有时候这两个又是指类似的事情。比如说,消除噪音的同时图像的显示效果显著的提升了,那么,这时候就是同样的意思了。
常见的图像增强方法有对比度拉伸,直方图均衡化,图像锐化等。前面两个是在空域进行基于像 素点的变换,后面一个是在频域处理。我理解的锐化就是直接在图像上加上图像高通滤波后的分量,也就是图像的边缘效果。对比度拉伸和直方图均衡化都是为了提 高图像的对比度,也就是使图像看起来差异更明显一些,我想,经过这样的处理以后,图像也应该增强了图像的高频分量,使得图像的细节上差异更大。同时也引入 了一些噪音。
对图像二维傅立叶变换的意义
众所周至,傅立叶变换可以将连续或离散的函数序列从空域映射到频域上,因此,傅立叶变换是信息与信号学中不可获缺的强大工具。但是,由于傅立 叶变换在学习时是以一大堆公式的形式给出的,因此很多人(包括我在内)往往在做了一大堆习题掌握了变换的数学表示却对其变换后的物理意义一无所知,尤其是 自学的时候更是晕头转向。
这里假设大家对傅立叶变换的数学表示已经很熟悉了,撇开傅立叶变换本身和其在其他领域的应用不谈,只谈图像傅立叶变换前后的对应关系。我们知道傅立叶变换 以前,图像(未压缩的位图)是由对在连续空间(现实空间)上的采样得到一系列点的集合,我们习惯用一个二维矩阵表示空间上各点,则图像可由 z=f(x,y)来表示。由于空间是三维的,图像是二维的,因此空间中物体在另一个维度上的关系就由梯度来表示,这样我们可以通过观察图像得知物体在三维 空间中的对应关系。为什么要提梯度?因为实际上对图像进行二维傅立叶变换得到频谱图,就是图像梯度的分布图,当然频谱图上的各点与图像上各点并不存在一一 对应的关系,即使在不移频的情况下也是没有。傅立叶频谱图上我们看到的明暗不一的亮点,实际上图像上某一点与邻域点差异的强弱,即梯度的大小,也即该点的 频率的大小(可以这么理解,图像中的低频部分指低梯度的点,高频部分相反)。一般来讲,梯度大则该点的亮度强,否则该点亮度弱。这样通过观察傅立叶变换后 的频谱图,也叫功率图(看看频谱图的各点的计算公式就知道为什么叫功率图了:)),我们首先就可以看出,图像的能量分布,如果频谱图中暗的点数更多,那么 实际图像是比较柔和的(因为各点与邻域差异都不大,梯度相对较小),反之,如果频谱图中亮的点数多,那么实际图像一定是尖锐的,边界分明且边界两边像素差 异较大的。对频谱移频到原点以后,可以看出图像的频率分布是以原点为圆心,对称分布的。将频谱移频到圆心除了可以清晰地看出图像频率分布以外,还有一个好 处,它可以分离出有周期性规律的干扰信号,比如正玄(sin的正玄,找不到这个字,郁闷)干扰,一副带有正玄干扰,移频到原点的频谱图上可以看出除了中心 以外还存在以某一点为中心,对称分布的亮点集合,这个集合就是干扰噪音产生的,这时可以很直观的通过在该位置放置带阻滤波器消除干扰。
数学公式:
1维的离散序列的DFT变换公式为:
2维的离散矩阵的DFT变换公式为:
1.使用模板处理图像相关概念:
模板:矩阵方块,其数学含义是一种卷积运算。
卷积运算:可看作是加权求和的过程,使用到的图像区域中的每个像素分别于卷积核(权矩阵)的每个元素对应相
乘,所有乘积之和作为区域中心像素的新值。
卷积核:卷积时使用到的权用一个矩阵表示,该矩阵与使用的图像区域大小相同,其行、列都是奇数,
是一个权矩阵。
卷积示例:
3 * 3 的像素区域R与卷积核G的卷积运算:
R5(中心像素)=R1G1 + R2G2 + R3G3 + R4G4 + R5G5 + R6G6 + R7G7 + R8G8 + R9G9

2.使用模板处理图像的问题:
边界问题:当处理图像边界像素时,卷积核与图像使用区域不能匹配,卷积核的中心与边界像素点对应,
卷积运算将出现问题。
处理办法:
A. 忽略边界像素,即处理后的图像将丢掉这些像素。
B. 保留原边界像素,即copy边界像素到处理后的图像。
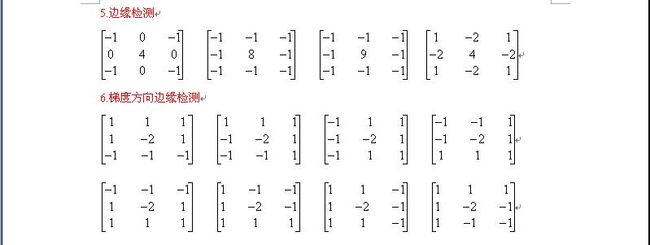
3.常用模板:

例子1.:
//【1】以灰度模式读取原始图像并显示
Mat srcImage = imread("1.jpg", 0);
if(!srcImage.data ) { printf("读取图片错误,请确定目录下是否有imread函数指定图片存在~! \n"); return false; }
imshow("原始图像" , srcImage);
//【2】将输入图像延扩到最佳的尺寸,边界用0补充
int m = getOptimalDFTSize( srcImage.rows );
int n = getOptimalDFTSize( srcImage.cols );
//将添加的像素初始化为0.
Mat padded;
copyMakeBorder(srcImage, padded, 0, m - srcImage.rows, 0, n - srcImage.cols, BORDER_CONSTANT, Scalar::all(0));
//【3】为傅立叶变换的结果(实部和虚部)分配存储空间。
//将planes数组组合合并成一个多通道的数组complexI
Mat planes[] = {Mat_(padded), Mat::zeros(padded.size(), CV_32F)};
Mat complexI;
merge(planes, 2, complexI);
//【4】进行就地离散傅里叶变换
dft(complexI, complexI);
//【5】将复数转换为幅值,即=> log(1 + sqrt(Re(DFT(I))^2 + Im(DFT(I))^2))
split(complexI, planes); // 将多通道数组complexI分离成几个单通道数组,planes[0] = Re(DFT(I), planes[1] = Im(DFT(I))
magnitude(planes[0], planes[1], planes[0]);// planes[0] = magnitude
Mat magnitudeImage = planes[0];
//【6】进行对数尺度(logarithmic scale)缩放
magnitudeImage += Scalar::all(1);
log(magnitudeImage, magnitudeImage);//求自然对数
//【7】剪切和重分布幅度图象限
//若有奇数行或奇数列,进行频谱裁剪
magnitudeImage = magnitudeImage(Rect(0, 0, magnitudeImage.cols & -2, magnitudeImage.rows & -2));
//重新排列傅立叶图像中的象限,使得原点位于图像中心
int cx = magnitudeImage.cols/2;
int cy = magnitudeImage.rows/2;
Mat q0(magnitudeImage, Rect(0, 0, cx, cy)); // ROI区域的左上
Mat q1(magnitudeImage, Rect(cx, 0, cx, cy)); // ROI区域的右上
Mat q2(magnitudeImage, Rect(0, cy, cx, cy)); // ROI区域的左下
Mat q3(magnitudeImage, Rect(cx, cy, cx, cy)); // ROI区域的右下
//交换象限(左上与右下进行交换)
Mat tmp;
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
//交换象限(右上与左下进行交换)
q1.copyTo(tmp);
q2.copyTo(q1);
tmp.copyTo(q2);
//【8】归一化,用0到1之间的浮点值将矩阵变换为可视的图像格式
//此句代码的OpenCV2版为:
//normalize(magnitudeImage, magnitudeImage, 0, 1, CV_MINMAX);
//此句代码的OpenCV3版为:
normalize(magnitudeImage, magnitudeImage, 0, 1, NORM_MINMAX);
//【9】显示效果图
imshow("频谱幅值", magnitudeImage);
函数解读:
C++: intgetOptimalDFTSize(int vecsize)
源码解读;
copyMakeBorder
C++: void copyMakeBorder(InputArraysrc, OutputArray dst, int top, int bottom, int left,int right, intborderType, const Scalar& value=Scalar())
src: 源图像
dst: 目标图像,和源图像有相同的类型,dst.cols=src.cols+left+right; dst.rows=src.rows+dst.top+dst.bottom
top:
bottom:
left:
right: 以上四个参数指定了在src图像周围附加的像素个数。
borderType: 边框类型
value: 当borderType==BORDER_CONSTANT时需要指定该值。
例子2.
optimalDFTSizeTab定义在namespace cv中,里边的数值为2^x*3^y*5^z
static const int optimalDFTSizeTab[] = {1,2, 3, 4, 5, 6, 8, 9, 10, 12, 15, 16,…, 2123366400, 2125764000};
示例代码:
图像卷积原理:
图像处理-线性滤波-1 基础(相关算子、卷积算子、边缘效应)
这里讨论利用输入图像中像素的小邻域来产生输出图像的方法,在信号处理中这种方法称为滤波(filtering)。其中,最常用的是线性滤波:输出像素是输入邻域像素的加权和。
1.相关算子(Correlation Operator)
定义:, 即 ,其中h称为相关核(Kernel).
步骤:
1)滑动核,使其中心位于输入图像g的(i,j)像素上
2)利用上式求和,得到输出图像的(i,j)像素值
3)充分上面操纵,直到求出输出图像的所有像素值
例:
A = [17 24 1 8 15 h = [8 1 6
23 5 7 14 16 3 5 7
4 6 13 20 22 4 9 2]
10 12 19 21 3
11 18 25 2 9]
计算输出图像的(2,4)元素=
Matlab 函数:imfilter(A,h)
2.卷积算子(Convolution)
定义: , ,其中
步骤:
1)将核围绕中心旋转180度
2)滑动核,使其中心位于输入图像g的(i,j)像素上
3)利用上式求和,得到输出图像的(i,j)像素值
4)充分上面操纵,直到求出输出图像的所有像素值
例:计算输出图像的(2,4)元素=
Matlab 函数:Matlab 函数:imfilter(A,h,'conv')% imfilter默认是相关算子,因此当进行卷积计算时需要传入参数'conv'
3.边缘效应
当对图像边缘的进行滤波时,核的一部分会位于图像边缘外面。
常用的策略包括:
1)使用常数填充:imfilter默认用0填充,这会造成处理后的图像边缘是黑色的。
2)复制边缘像素:I3 = imfilter(I,h,'replicate');
4.常用滤波
fspecial函数可以生成几种定义好的滤波器的相关算子的核。
例:unsharp masking 滤波
?
1
2
3
4
5
I = imread('moon.tif');
h = fspecial('unsharp');
I2 = imfilter(I,h);
imshow(I), title('Original Image')
figure, imshow(I2), title('Filtered Image')
图像处理-线性滤波-2 图像微分(1、2阶导数和拉普拉斯算子)
更复杂些的滤波算子一般是先利用高斯滤波来平滑,然后计算其1阶和2阶微分。由于它们滤除高频和低频,因此称为带通滤波器(band-pass filters)。
在介绍具体的带通滤波器前,先介绍必备的图像微分知识。
1 一阶导数
连续函数,其微分可表达为 ,或 (1.1)
对于离散情况(图像),其导数必须用差分方差来近似,有
,前向差分 forward differencing (1.2)
,中心差分 central differencing (1.3)
1)前向差分的Matlab实现
?
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
function dimg = mipforwarddiff(img,direction)
% MIPFORWARDDIFF Finite difference calculations
%
% DIMG = MIPFORWARDDIFF(IMG,DIRECTION)
%
% Calculates the forward-difference for a given direction
% IMG : input image
% DIRECTION : 'dx' or 'dy'
% DIMG : resultant image
%
% See also MIPCENTRALDIFF MIPBACKWARDDIFF MIPSECONDDERIV
% MIPSECONDPARTIALDERIV
% Omer Demirkaya, Musa Asyali, Prasana Shaoo, ... 9/1/06
% Medical Image Processing Toolbox
imgPad = padarray(img,[1 1],'symmetric','both');%将原图像的边界扩展
[row,col] = size(imgPad);
dimg = zeros(row,col);
switch (direction)
case 'dx',
dimg(:,1:col-1) = imgPad(:,2:col)-imgPad(:,1:col-1);%x方向差分计算,
case 'dy',
dimg(1:row-1,:) = imgPad(2:row,:)-imgPad(1:row-1,:);
otherwise, disp('Direction is unknown');
end;
dimg = dimg(2:end-1,2:end-1);
2)中心差分的Matlab实现
?
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
function dimg = mipcentraldiff(img,direction)
% MIPCENTRALDIFF Finite difference calculations
%
% DIMG = MIPCENTRALDIFF(IMG,DIRECTION)
%
% Calculates the central-difference for a given direction
% IMG : input image
% DIRECTION : 'dx' or 'dy'
% DIMG : resultant image
%
% See also MIPFORWARDDIFF MIPBACKWARDDIFF MIPSECONDDERIV
% MIPSECONDPARTIALDERIV
% Omer Demirkaya, Musa Asyali, Prasana Shaoo, ... 9/1/06
% Medical Image Processing Toolbox
img = padarray(img,[1 1],'symmetric','both');
[row,col] = size(img);
dimg = zeros(row,col);
switch (direction)
case 'dx',
dimg(:,2:col-1) = (img(:,3:col)-img(:,1:col-2))/2;
case 'dy',
dimg(2:row-1,:) = (img(3:row,:)-img(1:row-2,:))/2;
otherwise,
disp('Direction is unknown');
end
dimg = dimg(2:end-1,2:end-1);
?
1
实例:技术图像x方向导数
?
1
2
I = imread('coins.png'); figure; imshow(I);
Id = mipforwarddiff(I,'dx'); figure, imshow(Id);
原图像 x方向1阶导数
2 图像梯度(Image Gradient)
图像I的梯度定义为 ,其幅值为 。出于计算性能考虑,幅值也可用 来近似。
Matlab函数
1)gradient:梯度计算
2)quiver:以箭头形状绘制梯度。注意放大下面最右侧图可看到箭头,由于这里计算横竖两个方向的梯度,因此箭头方向都是水平或垂直的。
实例:仍采用上面的原始图像
?
1
2
3
4
5
I = double(imread('coins.png'));
[dx,dy]=gradient(I);
magnitudeI=sqrt(dx.^2+dy.^2);
figure;imagesc(magnitudeI);colormap(gray);%梯度幅值
hold on;quiver(dx,dy);%叠加梯度方向
梯度幅值 梯度幅值+梯度方向
3 二阶导数
对于一维函数,其二阶导数 ,即 。它的差分函数为
(3.1)
3.1 普拉斯算子(laplacian operator)
3.1.2 概念
拉普拉斯算子是n维欧式空间的一个二阶微分算子。它定义为两个梯度向量算子的内积
(3.2)
其在二维空间上的公式为: (3.3)
对于1维离散情况,其二阶导数变为二阶差分
1)首先,其一阶差分为
2)因此,二阶差分为
3)因此,1维拉普拉斯运算可以通过1维卷积核 实现
对于2维离散情况(图像),拉普拉斯算子是2个维上二阶差分的和(见式3.3),其公式为:
(3.4)
上式对应的卷积核为
常用的拉普拉斯核有:
3.1.2 应用
拉普拉斯算子会突出像素值快速变化的区域,因此常用于边缘检测。
Matlab里有两个函数
1)del2
计算公式: ,
2)fspecial:图像处理中一般利用Matlab函数fspecial
h = fspecial('laplacian', alpha) returns a 3-by-3 filter approximating the shape of the two-dimensional Laplacian operator.
The parameter alpha controls the shape of the Laplacian and must be in the range 0.0 to 1.0. The default value for alpha is 0.2.
3.1.3 资源
http://fourier.eng.hmc.edu/e161/lectures/gradient/node8.html (非常清晰的Laplacian Operator介绍,本文的主要参考)
http://homepages.inf.ed.ac.uk/rbf/HIPR2/log.htm
分类: R-Computer Vision
sift算法
尺度不变特征转换(Scale-invariant feature transform 或 SIFT)是一种电脑视觉的算法用来侦测与描述影像中的局部性特征,它在空间尺度中寻找极值点,并提取出其位置、尺度、旋转不变量,此算法由 David Lowe 在1999年所发表,2004年完善总结。
Sift算法就是用不同尺度(标准差)的高斯函数对图像进行平滑,然后比较平滑后图像的差别,
差别大的像素就是特征明显的点。
sift可以同时处理亮度,平移,旋转,尺度的变化,利用特征点来提取特征描述符,最后在特征描述符之间寻找匹配
五个步骤
1构建尺度空间,检测极值点,获得尺度不变性
2特征点过滤并进行经确定位,剔除不稳定的特征点
3 在特征点处提取特征描述符,为特征点分配方向直
4声称特征描述子,利用特征描述符寻找匹配点
5计算变换参数
当2幅图像的sift特征向量生成以后,下一步就可以采用关键点特征向量的欧式距离来作为2幅图像中关键点的相似性判定量度
尺度空间:
尺度就是受delta这个参数控制的表示
而不同的L(x,y,delta)就构成了尺度空间,实际上具体计算的时候即使连续的高斯函数,都要被离散为矩阵来和数字图像进行卷积操作
L(x,y,delta)=G(x,y,e)*i(x,y)
尺度空间=原始图像(卷积)一个可变尺度的2维高斯函数G(x,y,e)
G(x,y,e) = [1/2*pi*e^2] * exp[ -(x^2 + y^2)/2e^2]
为了更有效的在尺度空间检测到稳定的关键点,提出了高斯差分尺度空间,利用不同尺度的高斯差分核与原始图像i(x,y)卷积生成
D(x,y,e)=(G(x,y,ke)-G(x,y,e))*i(x,y)
=L(x,y,ke)-L(x,y,e)
(为避免遍历每个像素点)
高斯卷积:
在组建一组尺度空间后,再组建下一组尺度空间,对上一组尺度空间的最后一幅图像进行二分之一采样,得到下一组尺度空间的第一幅图像,然后进行像建立第一组尺度空间那样的操作,得到第二组尺度空间,公式定义为
L(x,y,e) = G(x,y,e)*I(x,y)
图像金字塔的构建:图像金字塔共O组,每组有S层,下一组的图像由上一组图像降采样得到、
高斯差分
在尺度空间建立完毕后,为了能够找到稳定的关键点,采用高斯差分的方法来检测那些在局部位置的极值点,即采用俩个相邻的尺度中的图像相减,即公式定义为:
D(x,y,e) = ((G(x,y,ke) - G(x,y,e)) * I(x,y)
= L(x,y,ke) - L(x,y,e)
咱们再来具体阐述下构造D(x,y,e)的详细步骤:
1、首先采用不同尺度因子的高斯核对图像进行卷积以得到图像的不同尺度空间,将这一组图像作为金子塔图像的第一层。
2、接着对第一层图像中的2倍尺度图像(相对于该层第一幅图像的2倍尺度)以2倍像素距离进行下采样来得到金子塔图像的第二层中的第一幅图像,对该图像采用不同尺度因子的高斯核进行卷积,以获得金字塔图像中第二层的一组图像。
3、再以金字塔图像中第二层中的2倍尺度图像(相对于该层第一幅图像的2倍尺度)以2倍像素距离进行下采样来得到金字塔图像的第三层中的第一幅图像,对该图像采用不同尺度因子的高斯核进行卷积,以获得金字塔图像中第三层的一组图像。这样依次类推,从而获得了金字塔图像的每一层中的一组图像,
4、对上图得到的每一层相邻的高斯图像相减,就得到了高斯差分图像,如下述第一幅图所示。下述第二幅图中的右列显示了将每组中相邻图像相减所生成的高斯差分图像的结果,限于篇幅,图中只给出了第一层和第二层高斯差分图像的计算

图像处理之卷积概念
我们来看一下一维卷积的概念.
连续空间的卷积定义是 f(x)与g(x)的卷积是 f(t-x)g(x) 在t从负无穷到正无穷的积分值.t-x要在f(x)定义域内,所以看上去很大的积分实际上还是在一定范围的.
实际的过程就是f(x) 先做一个Y轴的反转,然后再沿X轴平移t就是f(t-x),然后再把g(x)拿来,两者乘积的值再积分.想象一下如果g(x)或者f(x)是个单位的阶越函数. 那么就是f(t-x)与g(x)相交部分的面积.这就是卷积了.
把积分符号换成求和就是离散空间的卷积定义了.
那么在图像中卷积卷积地是什么意思呢,就是图像f(x),模板g(x),然后将模版g(x)在模版中移动,每到一个位置,就把f(x)与g(x)的定义域相交的元素进行乘积并且求和,得出新的图像一点,就是被卷积后的图像. 模版又称为卷积核.卷积核做一个矩阵的形状.
卷积定义上是线性系统分析经常用到的.线性系统就是一个系统的输入和输出的关系是线性关系.就是说整个系统可以分解成N多的无关独立变化,整个系统就是这些变化的累加.
如 x1->y1, x2->y2; 那么A*x1 + B*x2 -> A*y1 + B*y2 这就是线性系统. 表示一个线性系统可以用积分的形式 如 Y = Sf(t,x)g(x)dt S表示积分符号,就是f(t,x)表示的是A B之类的线性系数.
看上去很像卷积呀,,对如果f(t,x) = F(t-x) 不就是了吗.从f(t,x)变成F(t-x)实际上是说明f(t,x)是个线性移不变,就是说 变量的差不变化的时候,那么函数的值不变化. 实际上说明一个事情就是说线性移不变系统的输出可以通过输入和表示系统线性特征的函数卷积得到.
http://dept.wyu.edu.cn/dip/DIPPPT2005/����������ϵͳ.ppt
谈起卷积分当然要先说说冲击函数—-这个倒立的小蝌蚪,卷积其实就是为它诞生的。”冲击函数”是狄拉克为了解决一些瞬间作用的物理现象而提出的符号。
古人曰:”说一堆大道理不如举一个好例子”,冲量这一物理现象很能说明”冲击函数”。在t时间内对一物体作用F的力,我们可以让作用时间t很小,作用力F很大,但让Ft的乘积不变,即冲量不变。于是在用t做横坐标、F做纵坐标的坐标系中,就如同一个面积不变的长方形,底边被挤的窄窄的,高度被挤的高高的,在数学中它可以被挤到无限高,但即使它无限瘦、无限高、但它仍然保持面积不变(它没有被挤没!),为了证实它的存在,可以对它进行积分,积分就是求面积嘛!于是”卷积” 这个数学怪物就这样诞生了。说它是数学怪物是因为追求完美的数学家始终在头脑中转不过来弯,一个能瘦到无限小的家伙,竟能在积分中占有一席之地,必须将这个细高挑清除数学界。但物理学家、工程师们确非常喜欢它,因为它解决了很多当时数学家解决不了的实际问题。最终追求完美的数学家终于想通了,数学是来源于实际的,并最终服务于实际才是真。于是,他们为它量身定做了一套运作规律。于是,妈呀!你我都感觉眩晕的卷积分产生了。
例子:
有一个七品县令,喜欢用打板子来惩戒那些市井无赖,而且有个惯例:如果没犯大罪,只打一板,释放回家,以示爱民如子。
有一个无赖,想出人头地却没啥指望,心想:既然扬不了善名,出恶名也成啊。怎么出恶名?炒作呗!怎么炒作?找名人呀!他自然想到了他的行政长官——县令。
无赖于是光天化日之下,站在县衙门前撒了一泡尿,后果是可想而知地,自然被请进大堂挨了一板子,然后昂首挺胸回家,躺了一天,嘿!身上啥事也没有!第二天如法炮制,全然不顾行政长管的仁慈和衙门的体面,第三天、第四天……每天去县衙门领一个板子回来,还喜气洋洋地,坚持一个月之久!这无赖的名气已经和衙门口的臭气一样,传遍八方了!
县令大人噤着鼻子,呆呆地盯着案子上的惊堂木,拧着眉头思考一个问题:这三十个大板子怎么不好使捏?……想当初,本老爷金榜题名时,数学可是得了满分,今天好歹要解决这个问题:
——人(系统!)挨板子(脉冲!)以后,会有什么表现(输出!)?
——费话,疼呗!
——我问的是:会有什么表现?
——看疼到啥程度。像这无赖的体格,每天挨一个板子啥事都不会有,连哼一下都不可能,你也看到他那得意洋洋的嘴脸了(输出0);如果一次连揍他十个板子,他可能会皱皱眉头,咬咬牙,硬挺着不哼
(输出1);揍到二十个板子,他会疼得脸部扭曲,象猪似地哼哼(输出3);揍到三十个板子,他可能会象驴似地嚎叫,一把鼻涕一把泪地求你饶他一命(输出5);揍到四十个板子,他会大小便失禁,勉
强哼出声来(输出1);揍到五十个板子,他连哼一下都不可能(输出0)——死啦!
县令铺开坐标纸,以打板子的个数作为X轴,以哼哼的程度(输出)为Y轴,绘制了一条曲线:
——呜呼呀!这曲线象一座高山,弄不懂弄不懂。为啥那个无赖连挨了三十天大板却不喊绕命呀?
—— 呵呵,你打一次的时间间隔(Δτ=24小时)太长了,所以那个无赖承受的痛苦程度一天一利索,没有叠加,始终是一个常数;如果缩短打板子的时间间隔(建议 Δτ=0.5秒),那他的痛苦程度可就迅速叠加了;等到这无赖挨三十个大板(t=30)时,痛苦程度达到了他能喊叫的极限,会收到最好的惩戒效果,再多打就显示不出您的仁慈了。
——还是不太明白,时间间隔小,为什么痛苦程度会叠加呢?
——这与人(线性时不变系统)对板子(脉冲、输入、激励)的响应有关。什么是响应?人挨一个板子后,疼痛的感觉会在一天(假设的,因人而异)内慢慢消失(衰减),而不可能突然消失。这样一来,只要打板子的时间间隔很小,每一个板子引起的疼痛都来不及完全衰减,都会对最终的痛苦程度有不同的贡献:
t个大板子造成的痛苦程度=Σ(第τ个大板子引起的痛苦*衰减系数)
[衰减系数是(t-τ)的函数,仔细品味]
数学表达为:y(t)=∫T(τ)H(t-τ)
——拿人的痛苦来说卷积的事,太残忍了。除了人以外,其他事物也符合这条规律吗?
——呵呵,县令大人毕竟仁慈。其实除人之外,很多事情也遵循此道。好好想一想,铁丝为什么弯曲一次不折,快速弯曲多次却会轻易折掉呢?
——恩,一时还弄不清,容本官慢慢想来——但有一点是明确地——来人啊,将撒尿的那个无赖抓来,狠打40大板!
卷积及拉普拉斯变换的通俗解释–对于我这类没学过信号系统的人来说太需要了
卷积(convolution, 另一个通用名称是德文的Faltung)的名称由来,是在于当初定义它时,定义成 integ(f1(v)*f2(t-v))dv,积分区间在0到t之间。举个简单的例子,大家可以看到,为什么叫”卷积”了。比方说在(0,100)间积分,用简单的辛普生积分公式,积分区间分成100等分,那么看到的是f1(0)和f2(100)相乘,f1(1)和f2(99)相乘,f1(2)和f2 (98)相乘,……… 等等等等,就象是在坐标轴上回卷一样。所以人们就叫它”回卷积分”,或者”卷积”了。
为了理解”卷积”的物理意义,不妨将那个问题”相当于它的时域的信号与系统的单位脉冲响应的卷积”略作变化。这个变化纯粹是为了方便表达和理解,不影响任何其它方面。将这个问题表述成这样一个问题:一个信号通过一个系统,系统的响应是频率响应或波谱响应,且看如何理解卷积的物理意义。
假设信号函数为f, 响应函数为g。f不仅是时间的函数(信号时有时无),还是频率的函数(就算在某一固定时刻,还有的地方大有的地方小);g也是时间的函数(有时候有反应,有时候没反应),同时也是频率的函数(不同的波长其响应程度不一样)。那我们要看某一时刻 t 的响应信号,该怎么办呢?
这就需要卷积了。
要看某一时刻 t 的响应信号,自然是看下面两点:
1。你信号来的时候正赶上人家”系统”的响应时间段吗?
2。就算赶上系统响应时间段,响应有多少?
响 应不响应主要是看 f 和 g 两个函数有没有交叠;响应强度的大小不仅取决于所给的信号的强弱,还取决于在某频率处对单位强度响应率。响应强度是信号强弱和对单位强度信号响应率的乘积。”交叠”体现在f(t1)和g(t-t1)上,g之所以是”(t-t1)”就是看两个函数错开多少。
由于 f 和 g 两个函数都有一定的带宽分布(假若不用开头提到的”表述变化”就是都有一定的时间带宽分布),这个信号响应是在一定”范围”内广泛响应的。算总的响应信号,当然要把所有可能的响应加起来,实际上就是对所有可能t1积分了。积分范围虽然一般在负无穷到正无穷之间;但在没有信号或者没有响应的地方,积也是白积,结果是0,所以往往积分范围可以缩减。
这就是卷积及其物理意义啊。并成一句话来说,就是看一个时有时无(当然作为特例也可以永恒存在)的信号,跟一个响应函数在某一时刻有多大交叠。
*********拉普拉斯*********
拉普拉斯(1729-1827) 是法国数学家,天文学家,物理学家。他提出拉普拉斯变换(Laplace Transform) 的目的是想要解决他当时研究的牛顿引力场和太阳系的问题中涉及的积分微分方程。
拉普拉斯变换其实是一个数学上的简便算法;想要了解其”物理”意义 — 如果有的话 — 请看我举这样一个例子:
问题:请计算十万乘以一千万。
对于没学过指数的人,就只会直接相乘;对于学过指数的人,知道不过是把乘数和被乘数表达成指数形式后,两个指数相加就行了;如果要问究竟是多少,把指数转回来就是。
“拉 普拉斯变换” 就相当于上述例子中把数转换成”指数” 的过程;进行了拉普拉斯变换之后,复杂的微分方程(对应于上例中”复杂”的乘法) 就变成了简单的代数方程,就象上例中”复杂”的乘法变成了简单的加减法。再把简单的代数方程的解反变换回去(就象把指数重新转换会一般的数一样),就解决了原来那个复杂的微分方程。
所以要说拉普拉斯变换真有” 物理意义”的话,其物理意义就相当于人们把一般的有理数用指数形式表达一样。
另外说两句题外话:
1 。拉普拉斯变换之所以现在在电路中广泛应有,根本原因是电路中也广泛涉及了微分方程。
2。拉普拉斯变换与Z变换当然有紧密联系;其本质区别在于拉氏变换处理的是时间上连续的问题,Z变换处理的是时间上分立的问题。
Signals, Linear Systems, and Convolution
Download from here
我们都知道卷积公式,但是它有什么物理意义呢?平时我们用卷积做过很多事情,信号处理时,输出函数是输入函数和系统函数的卷积;在图像处理时,两组幅分辨率不同的图卷积之后得到的互相平滑的图像可以方便处理。卷积甚至可以用在考试作弊中,为了让照片同时像两个人,只要把两人的图像卷积处理即可,这就是一种平滑的过程,可是我们怎么才能真正把公式和实际建立起一种联系呢?生活中就有实例:
比如说你的老板命令你干活,你却到楼下打台球去了,后来被老板发现,他非常气愤,扇了你一巴掌(注意,这就是输入信号,脉冲),于是你的脸上会渐渐地(贱贱地)鼓起来一个包,你的脸就是一个系统,而鼓起来的包就是你的脸对巴掌的响应。
好,这样就和信号系统建立起来意义对应的联系。下面还需要一些假设来保证论证的严谨:假定你的脸是线性时不变系统,也就是说,无论什么时候老板打你一巴掌,打在你脸的同一位置(这似乎要求你的脸足够光滑,如果你说你长了很多青春痘,甚至整个脸皮处处连续处处不可导,那难度太大了,我就无话可说了),你的脸上总是会在相同的时间间隔内鼓起来一个相同高度的包来,并且假定以鼓起来的包的大小作为系统输出。好了,那么,下面可以进入核心内容——卷积了!
如果你每天都到楼下去打台球,那么老板每天都要扇你一巴掌,不过当老板打你一巴掌后,你5分钟就消肿了,所以时间长了,你甚至就适应这种生活了……如果有一天,老板忍无可忍,以0.5秒的间隔开始不间断的扇你的过程,这样问题就来了:第一次扇你鼓起来的包还没消肿,第二个巴掌就来了,你脸上的包就可能鼓起来两倍高,老板不断扇你,脉冲不断作用在你脸上,效果不断叠加了,这样这些效果就可以求和了,结果就是你脸上的包的高度岁时间变化的一个函数了(注意理解)!
如果老板再狠一点,频率越来越高,以至于你都辨别不清时间间隔了,那么,求和就变成积分了。可以这样理解,在这个过程中的某一固定的时刻,你的脸上的包的鼓起程度和什么有关呢?和之前每次打你都有关!但是各次的贡献是不一样的,越早打的巴掌,贡献越小,这就是说,某一时刻的输出是之前很多次输入乘以各自的衰减系数之后的叠加而形成某一点的输出,然后再把不同时刻的输出点放在一起,形成一个函数,这就是卷积。卷积之后的函数就是你脸上的包的大小随时间变化的函数。本来你的包几分钟就可以消肿,可是如果连续打,几个小时也消不了肿了,这难道不是一种平滑过程么?反映到公式上,f(a)就是第a个巴掌,g(x-a)就是第a个巴掌在x时刻的作用程度,乘起来再叠加就ok了,这就是卷积!
最后提醒各位,请勿亲身尝试……
卷积的物理意义?
在信号与系统中,两个函数所要表达的物理含义是什么?例如,一个系统,其单位冲激响应为h(t),当输入信号为f(t)时,该系统的输出为y(t)。为什么y(t)是f(t)和h(t)的卷积?(从数学推导我明白,但其物理意义不明白。)y(t)是f(t)和h(t)的卷积表达了一个什么意思?
卷积(convolution, 另一个通用名称是德文的Faltung)的名称由来,是在于当初定义它时,定义成 integ(f1(v)*f2(t-v))dv,积分区间在0到t之间。举个简单的例子,大家可以看到,为什么叫“卷积”了。比方说在(0,100)间积分,用简单的辛普生积分公式,积分区间分成100等分,那么看到的是f1(0)和f2(100)相乘,f1(1)和f2(99)相乘,f1(2)和f2(98)相乘,......... 等等等等,就象是在坐标轴上回卷一样。所以人们就叫它“回卷积分”,或者“卷积”了。
为了理解“卷积”的物理意义,不妨将那个问题“相当于它的时域的信号与系统的单位脉冲响应的卷积”略作变化。这个变化纯粹是为了方便表达和理解,不影响任何其它方面。将这个问题表述成这样一个问题:一个信号通过一个系统,系统的响应是频率响应或波谱响应,且看如何理解卷积的物理意义。
假设信号函数为f, 响应函数为g。f不仅是时间的函数(信号时有时无),还是频率的函数(就算在某一固定时刻,还有的地方大有的地方小);g也是时间的函数(有时候有反应,有时候没反应),同时也是频率的函数(不同的波长其响应程度不一样)。那我们要看某一时刻 t 的响应信号,该怎么办呢?
这就需要卷积了。
其实卷积积分应用广泛用在信号里面,一个是频域一个是时域
卷积是个啥?我忽然很想从本质上理解它。于是我从抽屉里翻出自己珍藏了许多年,每每下决心阅读却永远都读不完的《应用傅立叶变换》。
3.1 一维卷积的定义
函数f(x)与函数h(x)的卷积,由函参量的无穷积分
定义。这里参量x和积分变量α皆为实数;函数f和h可实可复。
定义虽然找到了,但我还是一头雾水。卷积是个无穷积分吗?那它是干啥用的?再往后翻:几何说明、运算举例、基本性质,一堆的公式,就是没有说它是干啥用的。我于是坐在那呆想,忽然第二个困扰我的问题冒了出来:傅立叶变换是个啥?接着就是第三个、第四个、……、第N个问题。
傅立叶变换是个啥?听说能将时域上的东东变到频域上分析?哎?是变到频域上还是空间域上来着?到底啥是时域,频域,空间域?
上网查傅立叶变换的物理意义,没发现明确答案,倒发现了许多和我一样晕着问问题的人。结果又多出了许多名词,能量?功率谱?图像灰度域?……没办法又去翻那本教材。
1.1 一维傅立叶变换的定义与傅立叶积分定理
设f(x)是实变量x的函数,该函数可实可复,称积分
为函数f(x)的傅立叶变换。
吐血,啥是无穷积分来着?积分是啥来着?还能记起三角函数和差化积、积化和差公式吗?我忽然有种想把高中课本寻来重温的冲动。
卷积主要是为了将信号运算从时域转换为频域。
信号的时域的卷积等于频域的乘积。
利用这个性质以及特殊的δ函数可以通过抽样构造简单的调制电路
我比较赞同卷积的相关性的作用 在通信系统中的接收机部分MF匹配滤波器等就是本质上的相关
匹配滤波器最简单的形式就是原信号反转移位相乘积分得到的近似=相关
相关性越好得到的信号越强 这个我们有一次大作业做的 做地做到呕吐 呵呵
还有解调中一些东西本质就是相关
卷积公式 解释 卷积公式是用来求随机变量和的密度函数(pdf)的计算公式。 定义式: z(t)=x(t)*y(t)= ∫x(m)y(t-m)dm. 已知x,y的pdf,x(t),y(t).现在要求z=x+y的pdf. 我们作变量替显,令 z=x+y,m=x. 雅可比行列式=1.那么,z,m联合密度就是f(z,m)=x(m)y(z-m)*1. 这样,就可以很容易求Z的在(z,m)中边缘分布 即fZ(z)=∫x(m)y(z-m)dm..... 由于这个公式和x(t),y(t)存在一一对应的关系。为了方便,所以记 ∫x(m)y(z-m)dm=x(t)*y(t) 长度为m的向量序列u和长度为n的向量序列v,卷积w的向量序列长度为(m+n-1), u(n)与v(n)的卷积w(n)定义为: w(n)=u(n)@v(n)=sum(v(m)*u(n-m)),m from 负无穷到正无穷; 当m=n时w(1) = u(1)*v(1) w(2) = u(1)*v(2)+u(2)*v(1) w(3) = u(1)*v(3)+u(2)*v(2)+u(3)*v(1) … w(n) = u(1)*v(n)+u(2)*v(n-1)+ … +u(n)*v(1) … w(2*n-1) = u(n)*v(n) 当m≠n时,应以0补齐阶次低的向量的高位后进行计算 这是数学中常用的一个公式,在概率论中,是个重点也是一个难点。
卷积公式是用来求随机变量和的密度函数(pdf)的计算公式。
定义式:
z(t)=x(t)*y(t)= ∫x(m)y(t-m)dm.
已知x,y的pdf,x(t),y(t).现在要求z=x+y的pdf. 我们作变量替显,令
z=x+y,m=x. 雅可比行列式=1.那么,t,m联合密度就是f(z,m)=x(m)y(z-m)*1. 这样,就可以很容易求Z的在(z,m)中边缘分布
即fZ(z)=∫x(m)y(z-m)dm..... 由于这个公式和x(t),y(t)存在一一对应的关系。为了方便,所以记 ∫x(m)y(z-m)dm=x(t)*y(t)
卷积是一种线性运算,图像处理中常见的mask运算都是卷积,广泛应用于图像滤波。castlman的书对卷积讲得很详细。
高斯变换就是用高斯函数对图像进行卷积。高斯算子可以直接从离散高斯函数得到:
for(i=0; i {
for(j=0; j {
g[i*N+j]=exp(-((i-(N-1)/2)^2+(j-(N-1)/2)^2))/(2*delta^2));
sum += g[i*N+j];
}
}
再除以 sum 得到归一化算子
N是滤波器的大小,delta自选
首先,再提到卷积之前,必须提到卷积出现的背景。卷积是在信号与线性系统的基础上或背景中出现的,脱离这个背景单独谈卷积是没有任何意义的,除了那个所谓褶反公式上的数学意义和积分(或求和,离散情况下)。
信号与线性系统,讨论的就是信号经过一个线性系统以后发生的变化(就是输入输出和所经过的所谓系统,这三者之间的数学关系)。所谓线性系统的含义,就是,这个所谓的系统,带来的输出信号与输入信号的数学关系式之间是线性的运算关系。
因此,实际上,都是要根据我们需要待处理的信号形式,来设计所谓的系统传递函数,那么这个系统的传递函数和输入信号,在数学上的形式就是所谓的卷积关系。
卷积关系最重要的一种情况,就是在信号与线性系统或数字信号处理中的卷积定理。利用该定理,可以将时间域或空间域中的卷积运算等价为频率域的相乘运算,从而利用FFT等快速算法,实现有效的计算,节省运算代价。
参考:
http://www.cnblogs.com/a-toad/archive/2008/10/24/1318921.html
http://blog.sina.com.cn/s/blog_6d0e97bb01013op2.html
傅立叶变换在图像处理中有非常重要的作用。因为不仅傅立叶分析涉及图像处理很多方面,傅立 叶改进算法,比如离散余弦变换,gabor与小波在图像处理中也有重要的分量。傅立叶变换在图像处理的重要作用:
1.图像增强与图像去噪
绝 大部分噪音都是图像的高频分量,通过低通滤波器来滤除高频——噪声; 边缘也是图像的高频分量,可以通过添加高频分量来增强原始图像的边缘;
2.图像分割之边缘检测
提 取图像高频分量
3.图像特征提取:
形状特征:傅里叶描述子
纹 理特征:直接通过傅里叶系数来计算纹理特征
其他特征:将提取的特征值进行傅里叶变 换来使特征具有平移、伸缩、旋转不变性
4.图像压缩
可以直接通过傅里叶系数来压缩数据;常用的离散余弦变换是傅立叶变换的实变换;傅立叶变换。
傅里叶变换是将 时域信号分解为不同频率的正弦信号或余弦函数叠加之和。连续情况下要求原始信号在一个周期内满足绝对可积条件。离散情况下,傅里叶变换一定存在。冈萨雷斯 版<图像处理>里面的解释非常形象:一个恰当的比喻是将傅里叶变换比作一个玻璃棱镜。棱镜是可以将光分解为不同颜色的物理仪器,每个成分的颜 色由波长(或频率)来决定。傅里叶变换可以看作是数学上的棱镜,将函数基于频率分解为不同的成分。当我们考虑光时,讨论它的光谱或频率谱。同样,傅立叶变 换使我们能通过频率成分来分析一个函数。
傅立叶变换有很多优良的性质。
如线性, 对称性(可以用在计算信号的傅里叶变换里面);
时移性:函数在时域中的时移,对 应于其在频率域中附加产生的相移,而幅度频谱则保持不变;
频移性:函数在时域中乘 以e^jwt,可以使整个频谱搬移w。这个也叫调制定理,通讯里面信号的频分复用需要用到这个特性(将不同的信号调制到不同的频段上同时传输);
卷积定理:时域卷积等于频域乘积;时域乘积等于频域卷积(附加一个系数)。(图像处理里面 这个是个重点)。
信号在频率域的表现。
在频域中,频率越大说明原始信号变化速度越快;频率越小说明原始信号越平缓。当频率为0时,表示直 流信号,没有变化。因此,频率的大小反应了信号的变化快慢。高频分量解释信号的突变部分,而低频分量决定信号的整体形象。
在图像处理中,频域反应了图像在空域灰度变化剧烈程度,也就是图像灰度的变化速度,也就是图像的梯 度大小。对图像而言,图像的边缘部分是突变部分,变化较快,因此反应在频域上是高频分量;图像的噪声大部分情况下是高频部分;图像平缓变化部分则为低频分 量。也就是说,傅立叶变换提供另外一个角度来观察图像,可以将图像从灰度分布转化到频率分布上来观察图像的特征。书面一点说就是,傅里叶变换提供了一条从 空域到频率自由转换的途径。对图像处理而言,以下概念非常的重要:
图像高频分量: 图像突变部分;在某些情况下指图像边缘信息,某些情况下指噪声,更多是两者的混合;
低 频分量:图像变化平缓的部分,也就是图像轮廓信息
高通滤波器:让图像使低频分量抑 制,高频分量通过
低通滤波器:与高通相反,让图像使高频分量抑制,低频分量通过
带通滤波器:使图像在某一部分的频率信息通过,其他过低或过高都抑制
带阻滤波器,是带通的反。
模板运算与卷积定理
在时域内做模板运算,实际上就是对图像进行卷积。 模板运算是图像处理一个很重要的处理过程,很多图像处理过程,比如增强/去噪(这两个分不清楚),边缘检测中普遍用到。根据卷积定理,时域卷积等价与频域 乘积。因此,在时域内对图像做模板运算就等效于在频域内对图像做滤波处理。
比如说 一个均值模板,其频域响应为一个低通滤波器;在时域内对图像作均值滤波就等效于在频域内对图像用均值模板的频域响应对图像的频域响应作一个低通滤波。
图像去噪
图像去噪 就是压制图像的噪音部分。因此,如果噪音是高频额,从频域的角度来看,就是需要用一个低通滤波器对图像进行处理。通过低通滤波器可以抑制图像的高频分量。 但是这种情况下常常会造成边缘信息的抑制。常见的去噪模板有均值模板,高斯模板等。这两种滤波器都是在局部区域抑制图像的高频分量,模糊图像边缘的同时也 抑制了噪声。还有一种非线性滤波-中值滤波器。中值滤波器对脉冲型噪声有很好的去掉。因为脉冲点都是突变的点,排序以后输出中值,那么那些最大点和最小点 就可以去掉了。中值滤波对高斯噪音效果较差。
椒盐噪声:对于椒盐采用中值滤波可以 很好的去除。用均值也可以取得一定的效果,但是会引起边缘的模糊。
高斯白噪声:白 噪音在整个频域的都有分布,好像比较困难。
冈萨雷斯版图像处理P185:算术均值 滤波器和几何均值滤波器(尤其是后者)更适合于处理高斯或者均匀的随机噪声。谐波均值滤波器更适合于处理脉冲噪声。
图像增强
有时候感觉图像增 强与图像去噪是一对矛盾的过程,图像增强经常是需要增强图像的边缘,以获得更好的显示效果,这就需要增加图像的高频分量。而图像去噪是为了消除图像的噪 音,也就是需要抑制高频分量。有时候这两个又是指类似的事情。比如说,消除噪音的同时图像的显示效果显著的提升了,那么,这时候就是同样的意思了。
常见的图像增强方法有对比度拉伸,直方图均衡化,图像锐化等。前面两个是在空域进行基于像 素点的变换,后面一个是在频域处理。我理解的锐化就是直接在图像上加上图像高通滤波后的分量,也就是图像的边缘效果。对比度拉伸和直方图均衡化都是为了提 高图像的对比度,也就是使图像看起来差异更明显一些,我想,经过这样的处理以后,图像也应该增强了图像的高频分量,使得图像的细节上差异更大。同时也引入 了一些噪音。
对图像二维傅立叶变换的意义
众所周至,傅立叶变换可以将连续或离散的函数序列从空域映射到频域上,因此,傅立叶变换是信息与信号学中不可获缺的强大工具。但是,由于傅立 叶变换在学习时是以一大堆公式的形式给出的,因此很多人(包括我在内)往往在做了一大堆习题掌握了变换的数学表示却对其变换后的物理意义一无所知,尤其是 自学的时候更是晕头转向。
这里假设大家对傅立叶变换的数学表示已经很熟悉了,撇开傅立叶变换本身和其在其他领域的应用不谈,只谈图像傅立叶变换前后的对应关系。我们知道傅立叶变换 以前,图像(未压缩的位图)是由对在连续空间(现实空间)上的采样得到一系列点的集合,我们习惯用一个二维矩阵表示空间上各点,则图像可由 z=f(x,y)来表示。由于空间是三维的,图像是二维的,因此空间中物体在另一个维度上的关系就由梯度来表示,这样我们可以通过观察图像得知物体在三维 空间中的对应关系。为什么要提梯度?因为实际上对图像进行二维傅立叶变换得到频谱图,就是图像梯度的分布图,当然频谱图上的各点与图像上各点并不存在一一 对应的关系,即使在不移频的情况下也是没有。傅立叶频谱图上我们看到的明暗不一的亮点,实际上图像上某一点与邻域点差异的强弱,即梯度的大小,也即该点的 频率的大小(可以这么理解,图像中的低频部分指低梯度的点,高频部分相反)。一般来讲,梯度大则该点的亮度强,否则该点亮度弱。这样通过观察傅立叶变换后 的频谱图,也叫功率图(看看频谱图的各点的计算公式就知道为什么叫功率图了:)),我们首先就可以看出,图像的能量分布,如果频谱图中暗的点数更多,那么 实际图像是比较柔和的(因为各点与邻域差异都不大,梯度相对较小),反之,如果频谱图中亮的点数多,那么实际图像一定是尖锐的,边界分明且边界两边像素差 异较大的。对频谱移频到原点以后,可以看出图像的频率分布是以原点为圆心,对称分布的。将频谱移频到圆心除了可以清晰地看出图像频率分布以外,还有一个好 处,它可以分离出有周期性规律的干扰信号,比如正玄(sin的正玄,找不到这个字,郁闷)干扰,一副带有正玄干扰,移频到原点的频谱图上可以看出除了中心 以外还存在以某一点为中心,对称分布的亮点集合,这个集合就是干扰噪音产生的,这时可以很直观的通过在该位置放置带阻滤波器消除干扰。
数学公式:
1维的离散序列的DFT变换公式为:
2维的离散矩阵的DFT变换公式为:
1.使用模板处理图像相关概念:
模板:矩阵方块,其数学含义是一种卷积运算。
卷积运算:可看作是加权求和的过程,使用到的图像区域中的每个像素分别于卷积核(权矩阵)的每个元素对应相
乘,所有乘积之和作为区域中心像素的新值。
卷积核:卷积时使用到的权用一个矩阵表示,该矩阵与使用的图像区域大小相同,其行、列都是奇数,
是一个权矩阵。
卷积示例:
3 * 3 的像素区域R与卷积核G的卷积运算:
R5(中心像素)=R1G1 + R2G2 + R3G3 + R4G4 + R5G5 + R6G6 + R7G7 + R8G8 + R9G9
2.使用模板处理图像的问题:
边界问题:当处理图像边界像素时,卷积核与图像使用区域不能匹配,卷积核的中心与边界像素点对应,
卷积运算将出现问题。
处理办法:
A. 忽略边界像素,即处理后的图像将丢掉这些像素。
B. 保留原边界像素,即copy边界像素到处理后的图像。
3.常用模板:
例子1.:
//【1】以灰度模式读取原始图像并显示
Mat srcImage = imread("1.jpg", 0);
if(!srcImage.data ) { printf("读取图片错误,请确定目录下是否有imread函数指定图片存在~! \n"); return false; }
imshow("原始图像" , srcImage);
//【2】将输入图像延扩到最佳的尺寸,边界用0补充
int m = getOptimalDFTSize( srcImage.rows );
int n = getOptimalDFTSize( srcImage.cols );
//将添加的像素初始化为0.
Mat padded;
copyMakeBorder(srcImage, padded, 0, m - srcImage.rows, 0, n - srcImage.cols, BORDER_CONSTANT, Scalar::all(0));
//【3】为傅立叶变换的结果(实部和虚部)分配存储空间。
//将planes数组组合合并成一个多通道的数组complexI
Mat planes[] = {Mat_(padded), Mat::zeros(padded.size(), CV_32F)};
Mat complexI;
merge(planes, 2, complexI);
//【4】进行就地离散傅里叶变换
dft(complexI, complexI);
//【5】将复数转换为幅值,即=> log(1 + sqrt(Re(DFT(I))^2 + Im(DFT(I))^2))
split(complexI, planes); // 将多通道数组complexI分离成几个单通道数组,planes[0] = Re(DFT(I), planes[1] = Im(DFT(I))
magnitude(planes[0], planes[1], planes[0]);// planes[0] = magnitude
Mat magnitudeImage = planes[0];
//【6】进行对数尺度(logarithmic scale)缩放
magnitudeImage += Scalar::all(1);
log(magnitudeImage, magnitudeImage);//求自然对数
//【7】剪切和重分布幅度图象限
//若有奇数行或奇数列,进行频谱裁剪
magnitudeImage = magnitudeImage(Rect(0, 0, magnitudeImage.cols & -2, magnitudeImage.rows & -2));
//重新排列傅立叶图像中的象限,使得原点位于图像中心
int cx = magnitudeImage.cols/2;
int cy = magnitudeImage.rows/2;
Mat q0(magnitudeImage, Rect(0, 0, cx, cy)); // ROI区域的左上
Mat q1(magnitudeImage, Rect(cx, 0, cx, cy)); // ROI区域的右上
Mat q2(magnitudeImage, Rect(0, cy, cx, cy)); // ROI区域的左下
Mat q3(magnitudeImage, Rect(cx, cy, cx, cy)); // ROI区域的右下
//交换象限(左上与右下进行交换)
Mat tmp;
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
//交换象限(右上与左下进行交换)
q1.copyTo(tmp);
q2.copyTo(q1);
tmp.copyTo(q2);
//【8】归一化,用0到1之间的浮点值将矩阵变换为可视的图像格式
//此句代码的OpenCV2版为:
//normalize(magnitudeImage, magnitudeImage, 0, 1, CV_MINMAX);
//此句代码的OpenCV3版为:
normalize(magnitudeImage, magnitudeImage, 0, 1, NORM_MINMAX);
//【9】显示效果图
imshow("频谱幅值", magnitudeImage); 函数解读:
C++: intgetOptimalDFTSize(int vecsize)
源码解读;
copyMakeBorder
C++: void copyMakeBorder(InputArraysrc, OutputArray dst, int top, int bottom, int left,int right, intborderType, const Scalar& value=Scalar())
src: 源图像
dst: 目标图像,和源图像有相同的类型,dst.cols=src.cols+left+right; dst.rows=src.rows+dst.top+dst.bottom
top:
bottom:
left:
right: 以上四个参数指定了在src图像周围附加的像素个数。
borderType: 边框类型
value: 当borderType==BORDER_CONSTANT时需要指定该值。
optimalDFTSizeTab定义在namespace cv中,里边的数值为2^x*3^y*5^z
static const int optimalDFTSizeTab[] = {1,2, 3, 4, 5, 6, 8, 9, 10, 12, 15, 16,…, 2123366400, 2125764000};
示例代码:
图像处理-线性滤波-1 基础(相关算子、卷积算子、边缘效应)
这里讨论利用输入图像中像素的小邻域来产生输出图像的方法,在信号处理中这种方法称为滤波(filtering)。其中,最常用的是线性滤波:输出像素是输入邻域像素的加权和。
1.相关算子(Correlation Operator)
定义:, 即 ,其中h称为相关核(Kernel).
步骤:
1)滑动核,使其中心位于输入图像g的(i,j)像素上
2)利用上式求和,得到输出图像的(i,j)像素值
3)充分上面操纵,直到求出输出图像的所有像素值
例:
A = [17 24 1 8 15 h = [8 1 6
23 5 7 14 16 3 5 7
4 6 13 20 22 4 9 2]
10 12 19 21 3
11 18 25 2 9]计算输出图像的(2,4)元素=
Matlab 函数:imfilter(A,h)
2.卷积算子(Convolution)
定义: , ,其中
步骤:
1)将核围绕中心旋转180度
2)滑动核,使其中心位于输入图像g的(i,j)像素上
3)利用上式求和,得到输出图像的(i,j)像素值
4)充分上面操纵,直到求出输出图像的所有像素值
例:计算输出图像的(2,4)元素=
Matlab 函数:Matlab 函数:imfilter(A,h,'conv')% imfilter默认是相关算子,因此当进行卷积计算时需要传入参数'conv'
3.边缘效应
当对图像边缘的进行滤波时,核的一部分会位于图像边缘外面。
常用的策略包括:
1)使用常数填充:imfilter默认用0填充,这会造成处理后的图像边缘是黑色的。
2)复制边缘像素:I3 = imfilter(I,h,'replicate');
4.常用滤波
fspecial函数可以生成几种定义好的滤波器的相关算子的核。
例:unsharp masking 滤波
?
I = imread('moon.tif');h = fspecial('unsharp');I2 = imfilter(I,h);imshow(I), title('Original Image')figure, imshow(I2), title('Filtered Image')
图像处理-线性滤波-2 图像微分(1、2阶导数和拉普拉斯算子)
更复杂些的滤波算子一般是先利用高斯滤波来平滑,然后计算其1阶和2阶微分。由于它们滤除高频和低频,因此称为带通滤波器(band-pass filters)。
在介绍具体的带通滤波器前,先介绍必备的图像微分知识。
1 一阶导数
连续函数,其微分可表达为 ,或 (1.1)
对于离散情况(图像),其导数必须用差分方差来近似,有
,前向差分 forward differencing (1.2)
,中心差分 central differencing (1.3)
1)前向差分的Matlab实现
?
function dimg = mipforwarddiff(img,direction)% MIPFORWARDDIFF Finite difference calculations%% DIMG = MIPFORWARDDIFF(IMG,DIRECTION)%% Calculates the forward-differencefora given direction% IMG : input image% DIRECTION :'dx'or'dy'% DIMG : resultant image%% See also MIPCENTRALDIFF MIPBACKWARDDIFF MIPSECONDDERIV% MIPSECONDPARTIALDERIV% Omer Demirkaya, Musa Asyali, Prasana Shaoo, ... 9/1/06% Medical Image Processing ToolboximgPad = padarray(img,[1 1],'symmetric','both');%将原图像的边界扩展[row,col] = size(imgPad);dimg = zeros(row,col);switch(direction)case'dx',dimg(:,1:col-1) = imgPad(:,2:col)-imgPad(:,1:col-1);%x方向差分计算,case'dy',dimg(1:row-1,:) = imgPad(2:row,:)-imgPad(1:row-1,:);otherwise, disp('Direction is unknown');end;dimg = dimg(2:end-1,2:end-1);
2)中心差分的Matlab实现
?
function dimg = mipcentraldiff(img,direction)% MIPCENTRALDIFF Finite difference calculations%% DIMG = MIPCENTRALDIFF(IMG,DIRECTION)%% Calculates the central-differencefora given direction% IMG : input image% DIRECTION :'dx'or'dy'% DIMG : resultant image%% See also MIPFORWARDDIFF MIPBACKWARDDIFF MIPSECONDDERIV% MIPSECONDPARTIALDERIV% Omer Demirkaya, Musa Asyali, Prasana Shaoo, ... 9/1/06% Medical Image Processing Toolboximg = padarray(img,[1 1],'symmetric','both');[row,col] = size(img);dimg = zeros(row,col);switch(direction)case'dx',dimg(:,2:col-1) = (img(:,3:col)-img(:,1:col-2))/2;case'dy',dimg(2:row-1,:) = (img(3:row,:)-img(1:row-2,:))/2;otherwise,disp('Direction is unknown');enddimg = dimg(2:end-1,2:end-1);?
1
实例:技术图像x方向导数
?
I = imread('coins.png'); figure; imshow(I);Id = mipforwarddiff(I,'dx'); figure, imshow(Id);
原图像 x方向1阶导数
2 图像梯度(Image Gradient)
图像I的梯度定义为 ,其幅值为 。出于计算性能考虑,幅值也可用 来近似。
Matlab函数
1)gradient:梯度计算
2)quiver:以箭头形状绘制梯度。注意放大下面最右侧图可看到箭头,由于这里计算横竖两个方向的梯度,因此箭头方向都是水平或垂直的。
实例:仍采用上面的原始图像
?
I =double(imread('coins.png'));[dx,dy]=gradient(I);magnitudeI=sqrt(dx.^2+dy.^2);figure;imagesc(magnitudeI);colormap(gray);%梯度幅值hold on;quiver(dx,dy);%叠加梯度方向
梯度幅值 梯度幅值+梯度方向
3 二阶导数
对于一维函数,其二阶导数 ,即 。它的差分函数为
(3.1)
3.1 普拉斯算子(laplacian operator)
3.1.2 概念
拉普拉斯算子是n维欧式空间的一个二阶微分算子。它定义为两个梯度向量算子的内积
(3.2)
其在二维空间上的公式为: (3.3)
对于1维离散情况,其二阶导数变为二阶差分
1)首先,其一阶差分为
2)因此,二阶差分为
3)因此,1维拉普拉斯运算可以通过1维卷积核 实现
对于2维离散情况(图像),拉普拉斯算子是2个维上二阶差分的和(见式3.3),其公式为:
(3.4)
上式对应的卷积核为
常用的拉普拉斯核有:
3.1.2 应用
拉普拉斯算子会突出像素值快速变化的区域,因此常用于边缘检测。
Matlab里有两个函数
1)del2
计算公式: ,
2)fspecial:图像处理中一般利用Matlab函数fspecial
h = fspecial('laplacian', alpha) returns a 3-by-3 filter approximating the shape of the two-dimensional Laplacian operator.
The parameter alpha controls the shape of the Laplacian and must be in the range 0.0 to 1.0. The default value for alpha is 0.2.
3.1.3 资源
http://fourier.eng.hmc.edu/e161/lectures/gradient/node8.html (非常清晰的Laplacian Operator介绍,本文的主要参考)
http://homepages.inf.ed.ac.uk/rbf/HIPR2/log.htm
sift算法
尺度不变特征转换(Scale-invariant feature transform 或 SIFT)是一种电脑视觉的算法用来侦测与描述影像中的局部性特征,它在空间尺度中寻找极值点,并提取出其位置、尺度、旋转不变量,此算法由 David Lowe 在1999年所发表,2004年完善总结。
Sift算法就是用不同尺度(标准差)的高斯函数对图像进行平滑,然后比较平滑后图像的差别,
差别大的像素就是特征明显的点。
sift可以同时处理亮度,平移,旋转,尺度的变化,利用特征点来提取特征描述符,最后在特征描述符之间寻找匹配
五个步骤
1构建尺度空间,检测极值点,获得尺度不变性
2特征点过滤并进行经确定位,剔除不稳定的特征点
3 在特征点处提取特征描述符,为特征点分配方向直
4声称特征描述子,利用特征描述符寻找匹配点
5计算变换参数
当2幅图像的sift特征向量生成以后,下一步就可以采用关键点特征向量的欧式距离来作为2幅图像中关键点的相似性判定量度
尺度空间:
尺度就是受delta这个参数控制的表示
而不同的L(x,y,delta)就构成了尺度空间,实际上具体计算的时候即使连续的高斯函数,都要被离散为矩阵来和数字图像进行卷积操作
L(x,y,delta)=G(x,y,e)*i(x,y)
尺度空间=原始图像(卷积)一个可变尺度的2维高斯函数G(x,y,e)
G(x,y,e) = [1/2*pi*e^2] * exp[ -(x^2 + y^2)/2e^2]
为了更有效的在尺度空间检测到稳定的关键点,提出了高斯差分尺度空间,利用不同尺度的高斯差分核与原始图像i(x,y)卷积生成
D(x,y,e)=(G(x,y,ke)-G(x,y,e))*i(x,y)
=L(x,y,ke)-L(x,y,e)
(为避免遍历每个像素点)
高斯卷积:
在组建一组尺度空间后,再组建下一组尺度空间,对上一组尺度空间的最后一幅图像进行二分之一采样,得到下一组尺度空间的第一幅图像,然后进行像建立第一组尺度空间那样的操作,得到第二组尺度空间,公式定义为
L(x,y,e) = G(x,y,e)*I(x,y)
图像金字塔的构建:图像金字塔共O组,每组有S层,下一组的图像由上一组图像降采样得到、
高斯差分
在尺度空间建立完毕后,为了能够找到稳定的关键点,采用高斯差分的方法来检测那些在局部位置的极值点,即采用俩个相邻的尺度中的图像相减,即公式定义为:D(x,y,e) = ((G(x,y,ke) - G(x,y,e)) * I(x,y)
= L(x,y,ke) - L(x,y,e)
1、首先采用不同尺度因子的高斯核对图像进行卷积以得到图像的不同尺度空间,将这一组图像作为金子塔图像的第一层。
2、接着对第一层图像中的2倍尺度图像(相对于该层第一幅图像的2倍尺度)以2倍像素距离进行下采样来得到金子塔图像的第二层中的第一幅图像,对该图像采用不同尺度因子的高斯核进行卷积,以获得金字塔图像中第二层的一组图像。
3、再以金字塔图像中第二层中的2倍尺度图像(相对于该层第一幅图像的2倍尺度)以2倍像素距离进行下采样来得到金字塔图像的第三层中的第一幅图像,对该图像采用不同尺度因子的高斯核进行卷积,以获得金字塔图像中第三层的一组图像。这样依次类推,从而获得了金字塔图像的每一层中的一组图像,
图像处理之卷积概念
我们来看一下一维卷积的概念.
连续空间的卷积定义是 f(x)与g(x)的卷积是 f(t-x)g(x) 在t从负无穷到正无穷的积分值.t-x要在f(x)定义域内,所以看上去很大的积分实际上还是在一定范围的.
实际的过程就是f(x) 先做一个Y轴的反转,然后再沿X轴平移t就是f(t-x),然后再把g(x)拿来,两者乘积的值再积分.想象一下如果g(x)或者f(x)是个单位的阶越函数. 那么就是f(t-x)与g(x)相交部分的面积.这就是卷积了.
把积分符号换成求和就是离散空间的卷积定义了.
那么在图像中卷积卷积地是什么意思呢,就是图像f(x),模板g(x),然后将模版g(x)在模版中移动,每到一个位置,就把f(x)与g(x)的定义域相交的元素进行乘积并且求和,得出新的图像一点,就是被卷积后的图像. 模版又称为卷积核.卷积核做一个矩阵的形状.
卷积定义上是线性系统分析经常用到的.线性系统就是一个系统的输入和输出的关系是线性关系.就是说整个系统可以分解成N多的无关独立变化,整个系统就是这些变化的累加.
如 x1->y1, x2->y2; 那么A*x1 + B*x2 -> A*y1 + B*y2 这就是线性系统. 表示一个线性系统可以用积分的形式 如 Y = Sf(t,x)g(x)dt S表示积分符号,就是f(t,x)表示的是A B之类的线性系数.
看上去很像卷积呀,,对如果f(t,x) = F(t-x) 不就是了吗.从f(t,x)变成F(t-x)实际上是说明f(t,x)是个线性移不变,就是说 变量的差不变化的时候,那么函数的值不变化. 实际上说明一个事情就是说线性移不变系统的输出可以通过输入和表示系统线性特征的函数卷积得到.
http://dept.wyu.edu.cn/dip/DIPPPT2005/����������ϵͳ.ppt
古人曰:”说一堆大道理不如举一个好例子”,冲量这一物理现象很能说明”冲击函数”。在t时间内对一物体作用F的力,我们可以让作用时间t很小,作用力F很大,但让Ft的乘积不变,即冲量不变。于是在用t做横坐标、F做纵坐标的坐标系中,就如同一个面积不变的长方形,底边被挤的窄窄的,高度被挤的高高的,在数学中它可以被挤到无限高,但即使它无限瘦、无限高、但它仍然保持面积不变(它没有被挤没!),为了证实它的存在,可以对它进行积分,积分就是求面积嘛!于是”卷积” 这个数学怪物就这样诞生了。说它是数学怪物是因为追求完美的数学家始终在头脑中转不过来弯,一个能瘦到无限小的家伙,竟能在积分中占有一席之地,必须将这个细高挑清除数学界。但物理学家、工程师们确非常喜欢它,因为它解决了很多当时数学家解决不了的实际问题。最终追求完美的数学家终于想通了,数学是来源于实际的,并最终服务于实际才是真。于是,他们为它量身定做了一套运作规律。于是,妈呀!你我都感觉眩晕的卷积分产生了。
有一个七品县令,喜欢用打板子来惩戒那些市井无赖,而且有个惯例:如果没犯大罪,只打一板,释放回家,以示爱民如子。
有一个无赖,想出人头地却没啥指望,心想:既然扬不了善名,出恶名也成啊。怎么出恶名?炒作呗!怎么炒作?找名人呀!他自然想到了他的行政长官——县令。
无赖于是光天化日之下,站在县衙门前撒了一泡尿,后果是可想而知地,自然被请进大堂挨了一板子,然后昂首挺胸回家,躺了一天,嘿!身上啥事也没有!第二天如法炮制,全然不顾行政长管的仁慈和衙门的体面,第三天、第四天……每天去县衙门领一个板子回来,还喜气洋洋地,坚持一个月之久!这无赖的名气已经和衙门口的臭气一样,传遍八方了!
县令大人噤着鼻子,呆呆地盯着案子上的惊堂木,拧着眉头思考一个问题:这三十个大板子怎么不好使捏?……想当初,本老爷金榜题名时,数学可是得了满分,今天好歹要解决这个问题:
——人(系统!)挨板子(脉冲!)以后,会有什么表现(输出!)?
——费话,疼呗!
——我问的是:会有什么表现?
——看疼到啥程度。像这无赖的体格,每天挨一个板子啥事都不会有,连哼一下都不可能,你也看到他那得意洋洋的嘴脸了(输出0);如果一次连揍他十个板子,他可能会皱皱眉头,咬咬牙,硬挺着不哼
(输出1);揍到二十个板子,他会疼得脸部扭曲,象猪似地哼哼(输出3);揍到三十个板子,他可能会象驴似地嚎叫,一把鼻涕一把泪地求你饶他一命(输出5);揍到四十个板子,他会大小便失禁,勉
强哼出声来(输出1);揍到五十个板子,他连哼一下都不可能(输出0)——死啦!
县令铺开坐标纸,以打板子的个数作为X轴,以哼哼的程度(输出)为Y轴,绘制了一条曲线:
——呜呼呀!这曲线象一座高山,弄不懂弄不懂。为啥那个无赖连挨了三十天大板却不喊绕命呀?
—— 呵呵,你打一次的时间间隔(Δτ=24小时)太长了,所以那个无赖承受的痛苦程度一天一利索,没有叠加,始终是一个常数;如果缩短打板子的时间间隔(建议 Δτ=0.5秒),那他的痛苦程度可就迅速叠加了;等到这无赖挨三十个大板(t=30)时,痛苦程度达到了他能喊叫的极限,会收到最好的惩戒效果,再多打就显示不出您的仁慈了。
——还是不太明白,时间间隔小,为什么痛苦程度会叠加呢?
——这与人(线性时不变系统)对板子(脉冲、输入、激励)的响应有关。什么是响应?人挨一个板子后,疼痛的感觉会在一天(假设的,因人而异)内慢慢消失(衰减),而不可能突然消失。这样一来,只要打板子的时间间隔很小,每一个板子引起的疼痛都来不及完全衰减,都会对最终的痛苦程度有不同的贡献:
t个大板子造成的痛苦程度=Σ(第τ个大板子引起的痛苦*衰减系数)
[衰减系数是(t-τ)的函数,仔细品味]
数学表达为:y(t)=∫T(τ)H(t-τ)
——拿人的痛苦来说卷积的事,太残忍了。除了人以外,其他事物也符合这条规律吗?
——呵呵,县令大人毕竟仁慈。其实除人之外,很多事情也遵循此道。好好想一想,铁丝为什么弯曲一次不折,快速弯曲多次却会轻易折掉呢?
——恩,一时还弄不清,容本官慢慢想来——但有一点是明确地——来人啊,将撒尿的那个无赖抓来,狠打40大板!
卷积(convolution, 另一个通用名称是德文的Faltung)的名称由来,是在于当初定义它时,定义成 integ(f1(v)*f2(t-v))dv,积分区间在0到t之间。举个简单的例子,大家可以看到,为什么叫”卷积”了。比方说在(0,100)间积分,用简单的辛普生积分公式,积分区间分成100等分,那么看到的是f1(0)和f2(100)相乘,f1(1)和f2(99)相乘,f1(2)和f2 (98)相乘,……… 等等等等,就象是在坐标轴上回卷一样。所以人们就叫它”回卷积分”,或者”卷积”了。
为了理解”卷积”的物理意义,不妨将那个问题”相当于它的时域的信号与系统的单位脉冲响应的卷积”略作变化。这个变化纯粹是为了方便表达和理解,不影响任何其它方面。将这个问题表述成这样一个问题:一个信号通过一个系统,系统的响应是频率响应或波谱响应,且看如何理解卷积的物理意义。
假设信号函数为f, 响应函数为g。f不仅是时间的函数(信号时有时无),还是频率的函数(就算在某一固定时刻,还有的地方大有的地方小);g也是时间的函数(有时候有反应,有时候没反应),同时也是频率的函数(不同的波长其响应程度不一样)。那我们要看某一时刻 t 的响应信号,该怎么办呢?
这就需要卷积了。
要看某一时刻 t 的响应信号,自然是看下面两点:
1。你信号来的时候正赶上人家”系统”的响应时间段吗?
2。就算赶上系统响应时间段,响应有多少?
响 应不响应主要是看 f 和 g 两个函数有没有交叠;响应强度的大小不仅取决于所给的信号的强弱,还取决于在某频率处对单位强度响应率。响应强度是信号强弱和对单位强度信号响应率的乘积。”交叠”体现在f(t1)和g(t-t1)上,g之所以是”(t-t1)”就是看两个函数错开多少。
由于 f 和 g 两个函数都有一定的带宽分布(假若不用开头提到的”表述变化”就是都有一定的时间带宽分布),这个信号响应是在一定”范围”内广泛响应的。算总的响应信号,当然要把所有可能的响应加起来,实际上就是对所有可能t1积分了。积分范围虽然一般在负无穷到正无穷之间;但在没有信号或者没有响应的地方,积也是白积,结果是0,所以往往积分范围可以缩减。
这就是卷积及其物理意义啊。并成一句话来说,就是看一个时有时无(当然作为特例也可以永恒存在)的信号,跟一个响应函数在某一时刻有多大交叠。
*********拉普拉斯*********
拉普拉斯(1729-1827) 是法国数学家,天文学家,物理学家。他提出拉普拉斯变换(Laplace Transform) 的目的是想要解决他当时研究的牛顿引力场和太阳系的问题中涉及的积分微分方程。
拉普拉斯变换其实是一个数学上的简便算法;想要了解其”物理”意义 — 如果有的话 — 请看我举这样一个例子:
问题:请计算十万乘以一千万。
对于没学过指数的人,就只会直接相乘;对于学过指数的人,知道不过是把乘数和被乘数表达成指数形式后,两个指数相加就行了;如果要问究竟是多少,把指数转回来就是。
“拉 普拉斯变换” 就相当于上述例子中把数转换成”指数” 的过程;进行了拉普拉斯变换之后,复杂的微分方程(对应于上例中”复杂”的乘法) 就变成了简单的代数方程,就象上例中”复杂”的乘法变成了简单的加减法。再把简单的代数方程的解反变换回去(就象把指数重新转换会一般的数一样),就解决了原来那个复杂的微分方程。
所以要说拉普拉斯变换真有” 物理意义”的话,其物理意义就相当于人们把一般的有理数用指数形式表达一样。
另外说两句题外话:
1 。拉普拉斯变换之所以现在在电路中广泛应有,根本原因是电路中也广泛涉及了微分方程。
2。拉普拉斯变换与Z变换当然有紧密联系;其本质区别在于拉氏变换处理的是时间上连续的问题,Z变换处理的是时间上分立的问题。
Download from here
比如说你的老板命令你干活,你却到楼下打台球去了,后来被老板发现,他非常气愤,扇了你一巴掌(注意,这就是输入信号,脉冲),于是你的脸上会渐渐地(贱贱地)鼓起来一个包,你的脸就是一个系统,而鼓起来的包就是你的脸对巴掌的响应。
好,这样就和信号系统建立起来意义对应的联系。下面还需要一些假设来保证论证的严谨:假定你的脸是线性时不变系统,也就是说,无论什么时候老板打你一巴掌,打在你脸的同一位置(这似乎要求你的脸足够光滑,如果你说你长了很多青春痘,甚至整个脸皮处处连续处处不可导,那难度太大了,我就无话可说了),你的脸上总是会在相同的时间间隔内鼓起来一个相同高度的包来,并且假定以鼓起来的包的大小作为系统输出。好了,那么,下面可以进入核心内容——卷积了!
如果你每天都到楼下去打台球,那么老板每天都要扇你一巴掌,不过当老板打你一巴掌后,你5分钟就消肿了,所以时间长了,你甚至就适应这种生活了……如果有一天,老板忍无可忍,以0.5秒的间隔开始不间断的扇你的过程,这样问题就来了:第一次扇你鼓起来的包还没消肿,第二个巴掌就来了,你脸上的包就可能鼓起来两倍高,老板不断扇你,脉冲不断作用在你脸上,效果不断叠加了,这样这些效果就可以求和了,结果就是你脸上的包的高度岁时间变化的一个函数了(注意理解)!
如果老板再狠一点,频率越来越高,以至于你都辨别不清时间间隔了,那么,求和就变成积分了。可以这样理解,在这个过程中的某一固定的时刻,你的脸上的包的鼓起程度和什么有关呢?和之前每次打你都有关!但是各次的贡献是不一样的,越早打的巴掌,贡献越小,这就是说,某一时刻的输出是之前很多次输入乘以各自的衰减系数之后的叠加而形成某一点的输出,然后再把不同时刻的输出点放在一起,形成一个函数,这就是卷积。卷积之后的函数就是你脸上的包的大小随时间变化的函数。本来你的包几分钟就可以消肿,可是如果连续打,几个小时也消不了肿了,这难道不是一种平滑过程么?反映到公式上,f(a)就是第a个巴掌,g(x-a)就是第a个巴掌在x时刻的作用程度,乘起来再叠加就ok了,这就是卷积!
最后提醒各位,请勿亲身尝试……
卷积的物理意义?
卷积(convolution, 另一个通用名称是德文的Faltung)的名称由来,是在于当初定义它时,定义成 integ(f1(v)*f2(t-v))dv,积分区间在0到t之间。举个简单的例子,大家可以看到,为什么叫“卷积”了。比方说在(0,100)间积分,用简单的辛普生积分公式,积分区间分成100等分,那么看到的是f1(0)和f2(100)相乘,f1(1)和f2(99)相乘,f1(2)和f2(98)相乘,......... 等等等等,就象是在坐标轴上回卷一样。所以人们就叫它“回卷积分”,或者“卷积”了。
卷积是个啥?我忽然很想从本质上理解它。于是我从抽屉里翻出自己珍藏了许多年,每每下决心阅读却永远都读不完的《应用傅立叶变换》。
3.1 一维卷积的定义
函数f(x)与函数h(x)的卷积,由函参量的无穷积分
定义。这里参量x和积分变量α皆为实数;函数f和h可实可复。
定义虽然找到了,但我还是一头雾水。卷积是个无穷积分吗?那它是干啥用的?再往后翻:几何说明、运算举例、基本性质,一堆的公式,就是没有说它是干啥用的。我于是坐在那呆想,忽然第二个困扰我的问题冒了出来:傅立叶变换是个啥?接着就是第三个、第四个、……、第N个问题。
傅立叶变换是个啥?听说能将时域上的东东变到频域上分析?哎?是变到频域上还是空间域上来着?到底啥是时域,频域,空间域?
上网查傅立叶变换的物理意义,没发现明确答案,倒发现了许多和我一样晕着问问题的人。结果又多出了许多名词,能量?功率谱?图像灰度域?……没办法又去翻那本教材。
1.1 一维傅立叶变换的定义与傅立叶积分定理
设f(x)是实变量x的函数,该函数可实可复,称积分
为函数f(x)的傅立叶变换。
吐血,啥是无穷积分来着?积分是啥来着?还能记起三角函数和差化积、积化和差公式吗?我忽然有种想把高中课本寻来重温的冲动。
信号的时域的卷积等于频域的乘积。
利用这个性质以及特殊的δ函数可以通过抽样构造简单的调制电路
匹配滤波器最简单的形式就是原信号反转移位相乘积分得到的近似=相关
相关性越好得到的信号越强 这个我们有一次大作业做的 做地做到呕吐 呵呵
还有解调中一些东西本质就是相关
卷积公式 解释 卷积公式是用来求随机变量和的密度函数(pdf)的计算公式。 定义式: z(t)=x(t)*y(t)= ∫x(m)y(t-m)dm. 已知x,y的pdf,x(t),y(t).现在要求z=x+y的pdf. 我们作变量替显,令 z=x+y,m=x. 雅可比行列式=1.那么,z,m联合密度就是f(z,m)=x(m)y(z-m)*1. 这样,就可以很容易求Z的在(z,m)中边缘分布 即fZ(z)=∫x(m)y(z-m)dm..... 由于这个公式和x(t),y(t)存在一一对应的关系。为了方便,所以记 ∫x(m)y(z-m)dm=x(t)*y(t) 长度为m的向量序列u和长度为n的向量序列v,卷积w的向量序列长度为(m+n-1), u(n)与v(n)的卷积w(n)定义为: w(n)=u(n)@v(n)=sum(v(m)*u(n-m)),m from 负无穷到正无穷; 当m=n时w(1) = u(1)*v(1) w(2) = u(1)*v(2)+u(2)*v(1) w(3) = u(1)*v(3)+u(2)*v(2)+u(3)*v(1) … w(n) = u(1)*v(n)+u(2)*v(n-1)+ … +u(n)*v(1) … w(2*n-1) = u(n)*v(n) 当m≠n时,应以0补齐阶次低的向量的高位后进行计算 这是数学中常用的一个公式,在概率论中,是个重点也是一个难点。
卷积公式是用来求随机变量和的密度函数(pdf)的计算公式。
定义式:
z(t)=x(t)*y(t)= ∫x(m)y(t-m)dm.
已知x,y的pdf,x(t),y(t).现在要求z=x+y的pdf. 我们作变量替显,令
z=x+y,m=x. 雅可比行列式=1.那么,t,m联合密度就是f(z,m)=x(m)y(z-m)*1. 这样,就可以很容易求Z的在(z,m)中边缘分布
即fZ(z)=∫x(m)y(z-m)dm..... 由于这个公式和x(t),y(t)存在一一对应的关系。为了方便,所以记 ∫x(m)y(z-m)dm=x(t)*y(t)
高斯变换就是用高斯函数对图像进行卷积。高斯算子可以直接从离散高斯函数得到:
for(i=0; i
for(j=0; j
g[i*N+j]=exp(-((i-(N-1)/2)^2+(j-(N-1)/2)^2))/(2*delta^2));
sum += g[i*N+j];
}
}
再除以 sum 得到归一化算子
N是滤波器的大小,delta自选
信号与线性系统,讨论的就是信号经过一个线性系统以后发生的变化(就是输入输出和所经过的所谓系统,这三者之间的数学关系)。所谓线性系统的含义,就是,这个所谓的系统,带来的输出信号与输入信号的数学关系式之间是线性的运算关系。
因此,实际上,都是要根据我们需要待处理的信号形式,来设计所谓的系统传递函数,那么这个系统的传递函数和输入信号,在数学上的形式就是所谓的卷积关系。
卷积关系最重要的一种情况,就是在信号与线性系统或数字信号处理中的卷积定理。利用该定理,可以将时间域或空间域中的卷积运算等价为频率域的相乘运算,从而利用FFT等快速算法,实现有效的计算,节省运算代价。
参考:
http://www.cnblogs.com/a-toad/archive/2008/10/24/1318921.html
http://blog.sina.com.cn/s/blog_6d0e97bb01013op2.html