stm32学习笔记(7)数码管显示
提前说说
又是没写博客的一个周,每天过的都很爽难受。事实上,现在是正在学习的时间,我重新规整了学习计划,不像原来把每天自学学习时间的大部分时间给32了,现在基本两到三个小时左右。一是快期末了,得抽出时间复习了,二来文化课对我来说也十分重要,第三点就是还是得抽出时间陪陪女朋友的。好的是,自己学习的时长增多了,所以也不算太落后吧。每天中规中矩的看两次视频,基础部分视频一次看两遍。每天内容也不算多,但是感觉自己能吸收里面的知识。现在已经学到了pwm和输入捕获实验的地方,接下来就是显示屏的内容了。我决定先放放吧,每天看一节,剩余大部分时间主攻各个手册了,也算是彻底搞明白之前不会的点了。预计完成时间,六月底。
上个周学长学姐们给我们布置了任务,应用所学的知识完成数码管的显示。实验的总体难度是比较简单的,是一个很不错的练手机会,我觉得非常适合我们这些初学者。
废话不多说,开始吧
数码管显示实验
led数码管(LED Segment Displays)由多个发光二极管封装在一起组成“8”字型的器件,引线已在内部连接完成,只需引出它们的各个笔划,公共电极。数码管实际上是由七个发光管组成8字形构成的,加上小数点就是8个。这些段分别由字母a,b,c,d,e,f,g,dp来表示。
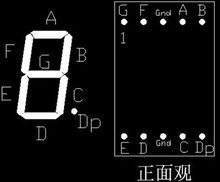
上图左边部分就是数码管的正面,右边是背后的引脚及其对应部分。(每个字母代表着一横行或者一数列,Dp代表左部分右下脚的点) 每一行的中间就如图所示,接地Gnd就可以了。
任务就是通过按键,让数码管由0-9或者9-0,学完定时器中断的,学姐还让我们用定时器中断写一个数码管显示的自动累加功能。
代码总体比较简单,但是一定要认真写,指不定在哪就会出错了。
led.h
#ifndef __LED_H
#define __LED_H
#include "sys.h"
#define LED5 PBout(5) // PB5
#define LED6 PBout(6) // PB6
#define LED7 PBout(7) // PB7
#define LED8 PBout(8) // PB8
#define LED9 PBout(9) // PB9
#define LED10 PBout(10) // PB10
#define LED11 PBout(11) // PB11
#define LED12 PBout(12)
#define LED1 PAout(8)
void LED_Init(void);//初始化
#endif
led.c
#include "led.h"
//GPIOB.5~GPIOB.13
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PA,PD端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_5);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_6);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_7);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_8);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_9);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_9);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_10);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_11);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_12);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOD, ENABLE); //使能PA,PD端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_SetBits(GPIOA,GPIO_Pin_8);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_SetBits(GPIOD,GPIO_Pin_2);
}
key.h
#ifndef __KEY_H
#define __KEY_H
#include "sys.h"
#define KEY0 GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_5)//读取按键0
#define KEY1 GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_15)//读取按键1
#define WK_UP GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0)//读取按键2
#define KEY0_PRES 1 //KEY0
#define KEY1_PRES 2 //KEY1
#define WKUP_PRES 3 //WK_UP
void KEY_Init(void);//IO初始化
u8 KEY_Scan(u8 mode); //按键扫描函数
#endif
key.c
#include "key.h"
#include "delay.h"
//按键初始化函数
//PA15和PC5 设置成输入
void KEY_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOC,ENABLE);//使能PORTA,PORTC时钟
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);//关闭jtag,使能SWD,可以用SWD模式调试
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;//PA15
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置成上拉输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA15
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;//PC5
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置成上拉输入
GPIO_Init(GPIOC, &GPIO_InitStructure);//初始化GPIOC5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;//PA0
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0设置成输入,默认下拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.0
}
//按键处理函数
//返回按键值
//mode:0,不支持连续按;1,支持连续按;
//返回值:
//0,没有任何按键按下
//KEY0_PRES,KEY0按下
//KEY1_PRES,KEY1按下
//WKUP_PRES,WK_UP按下
//注意此函数有响应优先级,KEY0>KEY1>WK_UP!!
u8 KEY_Scan(u8 mode)
{
static u8 key_up=1;//按键按松开标志
if(mode)key_up=1; //支持连按
if(key_up&&(KEY0==0||KEY1==0||WK_UP==1))
{
delay_ms(10);//去抖动
key_up=0;
if(KEY0==0)return KEY0_PRES;
else if(KEY1==0)return KEY1_PRES;
else if(WK_UP==1)return WKUP_PRES;
}else if(KEY0==1&&KEY1==1&&WK_UP==0)key_up=1;
return 0;// 无按键按下
}
按键实验基本就是照搬原子哥的,我觉得挺好用的。
main.c
#include "stm32f10x.h"
#include "led.h"
#include "delay.h"
#include "sys.h"
#include "key.h"
//上:5.中中 6.左上 7.上中 8.右上
//下:9.左下 10.下中 11.右下 12.点
void Light_0(void)
{
LED6=1;
LED7=1;
LED8=1;
LED9=1;
LED10=1;
LED11=1;
}
void Light_1(void)
{
LED8=1;
LED11=1;
}
void Light_2(void)
{
LED7=1;
LED8=1;
LED5=1;
LED9=1;
LED10=1;
}
void Light_3(void)
{
LED5=1;
LED8=1;
LED7=1;
LED11=1;
LED10=1;
}
void Light_4(void)
{
LED6=1;
LED5=1;
LED8=1;
LED11=1;
}
void Light_5(void)
{
LED7=1;
LED6=1;
LED5=1;
LED11=1;
LED10=1;
}
void Light_6(void)
{
LED7=1;
LED6=1;
LED5=1;
LED9=1;
LED10=1;
LED11=1;
}
void Light_7(void)
{
LED7=1;
LED8=1;
LED11=1;
}
void Light_8(void)
{
LED5=1;
LED6=1;
LED7=1;
LED8=1;
LED9=1;
LED10=1;
LED11=1;
}
void Light_9(void)
{
LED5=1;
LED6=1;
LED7=1;
LED8=1;
LED10=1;
LED11=1;
}
void Select_LED(u8 i)
{
switch(i)
{
case 0:Light_0();break;
case 1:Light_1();break;
case 2:Light_2();break;
case 3:Light_3();break;
case 4:Light_4();break;
case 5:Light_5();break;
case 6:Light_6();break;
case 7:Light_7();break;
case 8:Light_8();break;
case 9:Light_9();break;
}
}
void RESET_LED(void)
{
LED5=0;
LED6=0;
LED7=0;
LED8=0;
LED9=0;
LED10=0;
LED11=0;
LED12=0;
}
void TIM3_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 计数到5000为500ms
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 10Khz的计数频率
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_ITConfig( //使能或者失能指定的TIM中断
TIM3, //TIM2
TIM_IT_Update ,
ENABLE //使能
);
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIMx外设
}
void TIM3_IRQHandler(void) //TIM3中断
{
static u8 u=0;
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源
// Select_LED(u);
// u++;
// RESET_LED();
Select_LED(u);
delay_ms(1000);
u++;
RESET_LED();
// if(u==10)
// {
// u=0;
// TIM_Cmd(TIM3, DISABLE);
//}
}
}
int main(void)
{
int i=0,t=0;
delay_init(); //延时函数初始化
LED_Init(); //初始化与LED连接的硬件接口
KEY_Init(); //初始化与按键连接的硬件接口
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
// TIM3_Int_Init(4999,7199);
RESET_LED();
Light_0();
PAout(8)=0;
PDout(2)=1;
while(1)
{
t=KEY_Scan(0); //得到键值
switch(t)
{
case KEY0_PRES:
RESET_LED();
i++;
if(i==10) i=0;
Select_LED(i);
break;
case KEY1_PRES:
RESET_LED();
i--;
if(i==-1) i=9;
Select_LED(i);
break;
case WKUP_PRES:
RESET_LED();
TIM3_Int_Init(4999,7199);
break;
default:
delay_ms(10);
}
}
}
博主比较懒啊,所以就把所有的函数都堆到一起了(确实有点过分啊)。都是为了方便啊,我觉得也挺好理解的。
寄存器版
led.c
#include "led.h"
void LED_Init(void)
{
RCC->APB2ENR|=1<<3;
GPIOB->CRL&=0xFF0FFFFF;
GPIOB->CRL|=0x00300000;
GPIOB->ODR|=1<<5;
GPIOB->CRL&=0xF0FFFFFF;
GPIOB->CRL|=0x03000000;
GPIOB->ODR|=1<<6;
GPIOB->CRL&=0x0FFFFFFF;
GPIOB->CRL|=0x30000000;
GPIOB->ODR|=1<<7;
GPIOB->CRH&=0xFFFFFFF0;
GPIOB->CRH|=0x00000003;
GPIOB->ODR|=1<<8;
GPIOB->CRH&=0xFFFFFF0F;
GPIOB->CRH|=0x00000030;
GPIOB->ODR|=1<<9;
GPIOB->CRH&=0xFFFFF0FF;
GPIOB->CRH|=0x00000300;
GPIOB->ODR|=1<<10;
GPIOB->CRH&=0xFFFF0FFF;
GPIOB->CRH|=0x00003000;
GPIOB->ODR|=1<<11;
GPIOB->CRH&=0xFFF0FFFF;
GPIOB->CRH|=0x00030000;
GPIOB->ODR|=1<<12;
}
key.c
#include "key.h"
#include "delay.h"
void KEY_Init(void)
{
RCC->APB2ENR|=1<<2;
RCC->APB2ENR|=1<<4;
JTAG_Set(SWD_ENABLE);
GPIOA->CRL&=0xFFFFFFF0;
GPIOA->CRL|=0x00000008;
GPIOA->CRH&=0x0FFFFFFF;
GPIOA->CRH|=0x80000000;
GPIOA->ODR|=1<<15;
GPIOC->CRL&=0xFF0FFFFF;
GPIOC->CRL|=0x00800000;
GPIOC->ODR|=1<<5;
}
u8 KEY_Scan(u8 mode)
{
static u8 key_up=1;
if(mode) key_up=1;
if(key_up&&(KEY0==0||KEY1==0||WK_UP==1))
{
delay_ms(20);
key_up=0;
if(KEY0==0) return KEY0_PRES;
if(KEY1==0) return KEY1_PRES;
if(WK_UP==1) return WKUP_PRES;
}else if(KEY0==1&&KEY1==1&&WK_UP==0) key_up=1;
return 0;
}
当然这个代码还有很大的缺陷,比如第三个功能,它虽然可以不断地向上显示数字,但是在向上显示数字的过程中,我却无法让它停止,即就是在此期间按其他按键没有反应。那么问题来了,怎样退出定时器中断呢。学姐给我的建议是让我在按下某个按键后,让这个定时器失能从而实现退出。但是程序在执行的过程中是非常快的,我无法在那一瞬间按下按键,所以这个方法应该是不可行的(当然还有其他可以执行的方法)。
所以到底可以用什么方法呢,我现在还是没搞清楚,希望大家可以多多评论交流啊。
还有,这是我的数码管·==· 嘿嘿
