神经网络的优化(2)----优化器、自适应学习率:Adagrad、RMSProp、Momentum、Adam
| 一、Adagrad //这个优化器,带有自适应的学习率 点击此处返回总目录 二、RMSProp //Adagrad的进阶版,带有更好的自适应学习率 三、Momentum //动量。 四、Adam //RMSProp+Momentum。
下面开始讲,自适应学习率。
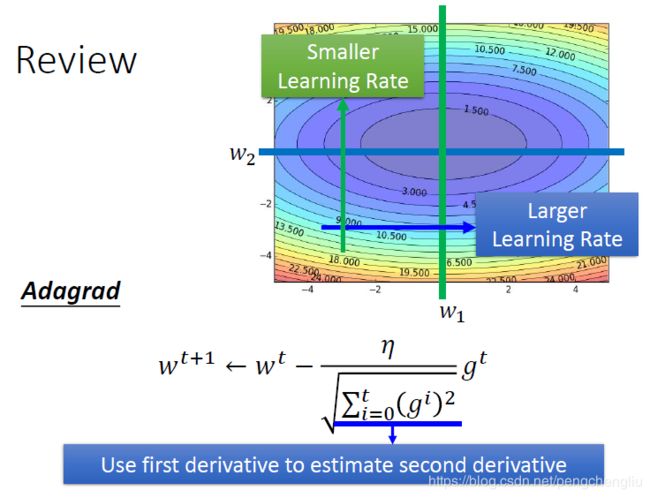
一、Adagrad 自适应的学习率,我们之前讲过。我们之前有讲过Adagrad。遗忘了可以回去看看。 但是实际上呢,我们面对的问题是有可能会比Adagrad可以处理的问题更加复杂的。也就是说,我们之前在做Linear Regression的时候呢,我们看到的Loss function是凸的。但是呢,我们在做deep learning的时候,loss function可以是任何形状。比如,它可以是下面这种怪异的月球的形状。当今天你的error surface是这个形状的时候,你会遇到的问题是,即使是同一个方向上,你的learning rate也必须能够快速地变动。对于convex的function,这个方向很平坦就一直很平坦,这个方向很陡峭,就一直很陡峭。但是,如果今天是更复杂的问题的时候,你考虑w1改变的这个方向,在某个区域它很平坦,所以它需要比较小的learning rate;但是到了另外一个区域,它又突然变得很陡峭,这时候需要比较大的learning rate。所以,要真正要处理deep learning的问题,用adagrad可能是不够的。你需要更动态地调整learning rate的方法。
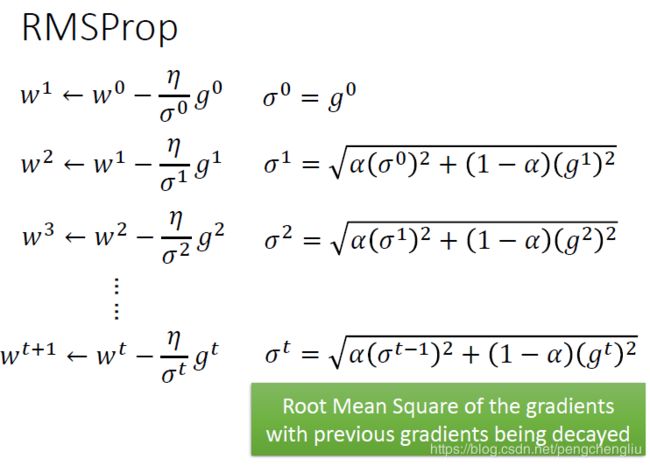
二、RMSProp 所以,这里有一个Adagrad的进阶版,叫RMSProp。RMSProp我觉得是一个蛮神奇的方法,你好像找不到他的paper,这个是在hitton的慕课里面提出来的。他在他的线上课程里面提出一个方法。大家引用的时候,要引用线上课程的youtoub链接。 这招还真的有用,RMSProp是这样做的。 我们用固定的learning rate eta除以一个值sigma,这个sigma是什么呢?在第一个时间点,sigma就是第一次算出来的gradient g0。在第二个时间点,算出来新的gradient g1,这个时候,sigma1就是原来的sigma的平方乘上alpha,再加上新的gradient的值g1的平方乘上(1-alpha),最后开根号。而这个alpha的值呢,是可以自由去调的。在下个时间点,也是这么算。 跟原来的adagrad不一样的地方是,原来的adagrad在分母放的值是g0,g1,g2的均方根。但是在RMSProp中,虽然也是包含g0,g1,g2的平方,但是可以给它乘上weight alpha或者是1-alpha,可以手动调整alpha的值(alpha的值可以手动设置)。当alpha的值设的小一点时,1-alpha比较大,那意思就是说你倾向于相信新的gradient所告诉你的这个error surface的平滑或陡峭的程度,而比较无视旧的gradient所给你的information。 所以当做RMSProp的时候,一样是在算gradient的均方根。但是你可以给现在的gradient比较大的weight,给过去的weight比较小的weight。
三、Momentum
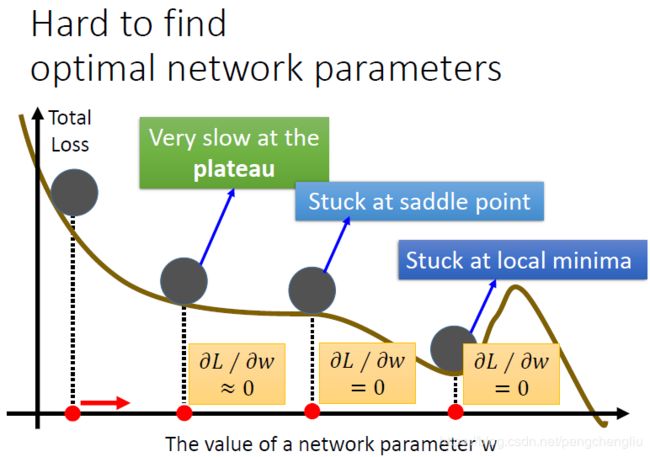
好,那除了learning rate的时候,我们知道在做deep learning的时候,大家都会说我们回卡在local minimum的地方。我们之前说,不见得会卡在local minimum ,还有可能卡在saddle point,甚至卡在plateau的地方。大家听到这个问题都会非常的担心,说,做deep learning是非常困难的,因为随便做一下就有一大堆的问题。其实,lecun(没听清楚,应该是他)在07年的时候,就有一个蛮特别的说法,他说,你不用太担心local minimum的问题。他说,其实error surface上没有太多local minimum,所以不同太担心。为什么呢?他说,你要是一个local minimum,必须每一个dimension都是山谷的谷底,假设山谷谷底出现的几率是p,因为我们的网络有非常多的参数,假设有1000个参数,每个参数都是山谷的谷底,这个概率是p^1000。网络越大,参数越多,出现的记录就越低。所以,local minimum在一个很大的网络里面,其实没有想象的那么多。很大的网络其实搞不好是很平滑的。所以当走到你觉得是local minimum卡住的时候,他8成就是global minimum,或者很接近global minimum。这个想法给大家参考,如果有特别的想法,可以再交流。
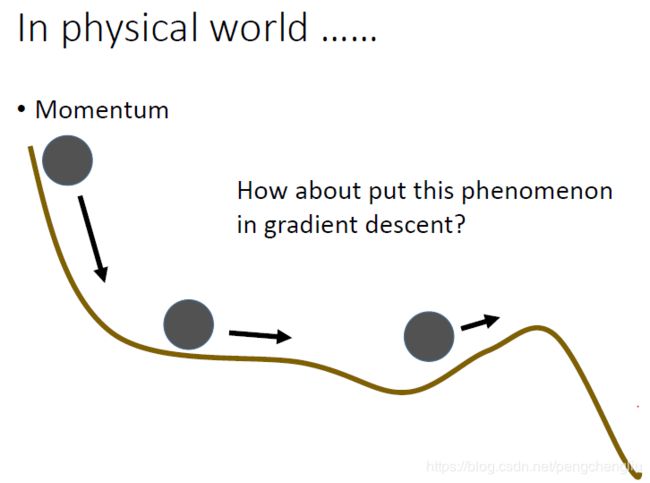
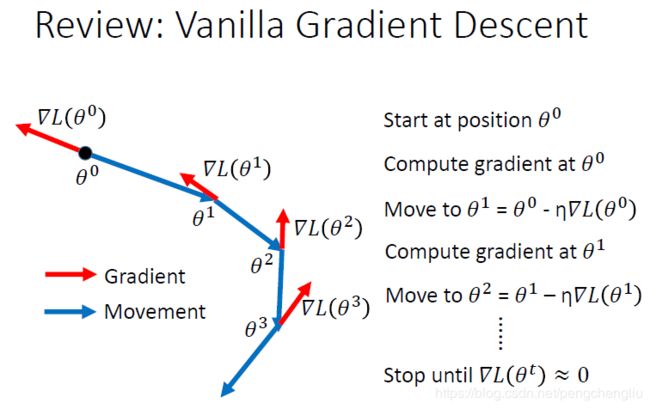
有一个方法可以处理local minima、saddle point 还有plateau的问题。这个想法呢,可以说是从真实的世界得到的灵感。在真实的世界里面,如果曲线是真实的地形。把球从上面滚下来,他滚到plateau的地方呢,不会停下来,因为有惯性,还会往前走。就算是走到上坡的地方,这要这个坡不是很陡,因为惯性的关系,它搞不好还是可以翻过这个山坡,最后就可以走到比当前的local minimum还要好的地方。所以我们要做的事情就是把惯性这个特性塞到gradient descent里面去。这件事情呢,就叫做Momentum。 这个东西怎么做呢? 我们先来复习一下一般的gradient descent。可以看这里。首先计算gradient(红色箭头),然后沿着反方向(蓝色箭头)走。
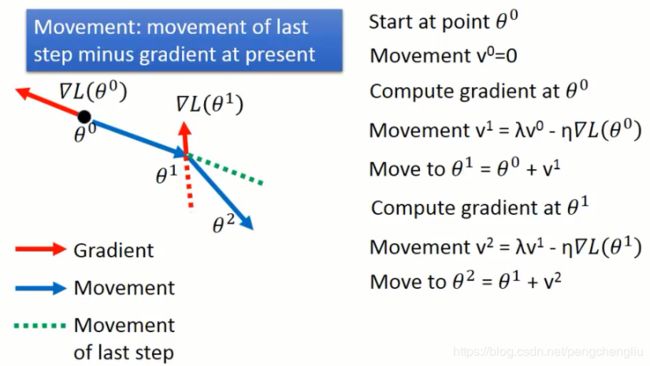
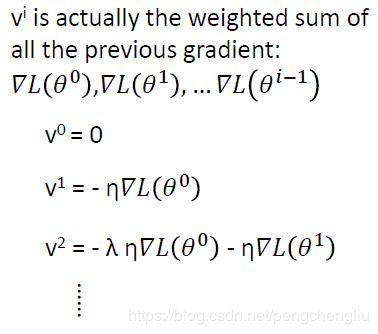
当我们加上Momentum的时候,我们是怎么做的呢?加上momentum之后,每次移动的方向不再是只有考虑现在的gradient,而是考虑现在的gradient加上在前一个时间点移动的方向。我们实际来看一下怎么运作的。 首先选一个初始值theta0,然后我们用一个v来记录我们在前一个时间点移动的方向。因为没有初始值,所以v0=0。
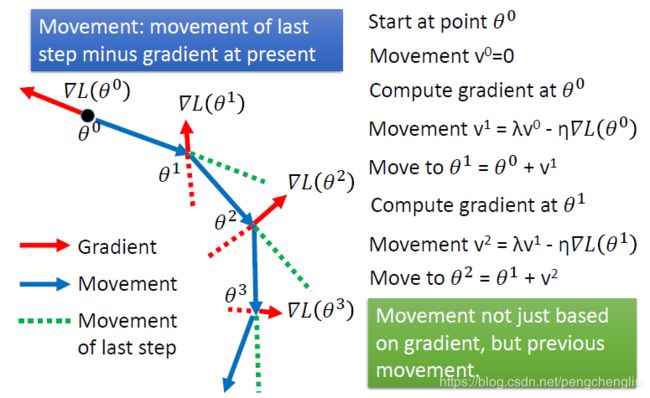
接下来计算theta0点的gradient,算出来是红色的箭头。然后呢,现在要移动的方向并不是红色箭头告诉我们的方向,而是前一个时间点的movement v0乘以lambda再加上负的梯度方向,其中lambda表示惯性的影响的大小。然后得到现在要移动的方向v1。这个就好像是惯性一样,如果我们之前走的方向是v0,那今天有一个新的gradient ,并不会让你现在参数更新的方向完全转到gradient的负方向,因为有惯性的关系,你原来走的方向还是有一定程度的影响。我们看下一步可能比较清楚。现在移动的方向是v1。 再计算theta1处的gradient,接下来要决定说,在第二个时间点我们要走的方向v2是什么样的。我们看图上说,gradient告诉我们要走红色虚线的方向,而原来的方向告诉我们要走蓝色虚线的方向。这两个合起来,就走了新的方向v2。
然后以此类推
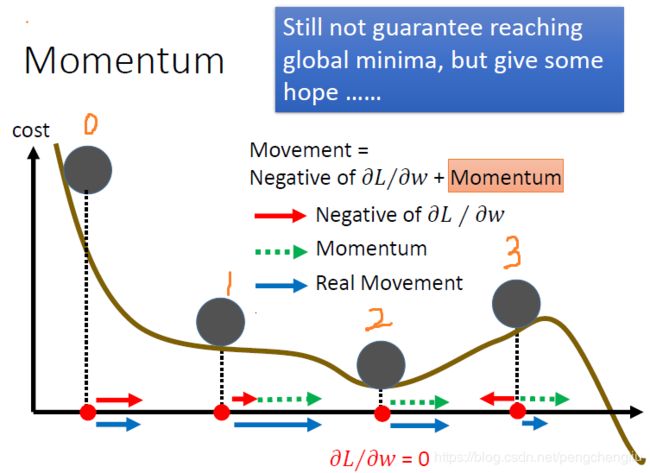
我们可以用另外一个方法来理解这件事情。其实每一个点移动的方向vi,其实是过去所有算出来的gradient的总和。因为带入之后。vi的式子里面有前面的所有的gradient。只是他们的weight是不一样的。lambda设的越小的话,说明越之前的gradient越不去理它,越在意现在的gradient,但是之前的gradient也对update的方向有影响。 如果你看数学式子,不太喜欢的话。可以直观来看一下。到底加入momentum以后,到底是怎么运作的。再加入momentum以后呢,每次移动的方向是负的梯度方向加上momentum建议我们要走的方向。这个momentum其实就是上一个时间点的movement。 所以假设在初试在0位置,gradient建议我们往右走,所以最后就往右移动。 移动到1位置,gradient建议我们往右走,而momentum也建议我们往右走(因为我们是从左边过来的),所以合起来得到蓝色的箭头。 移动到2这个local minimum的地方,gradient为0,gradient告诉说就停在这里。但是momentum告诉你说继续往右走,因为从左边过来的。所以最后参数update的方向会继续向右。 甚至你可以乐观地期待说,今天再往右的时候,走到3这个位置。gradient要求我们向左走。但是momentum建议我们继续向右走。如果今天momentum比较强的话,你就会还是向右走。所以你有可能会跳出local minimum,走到比较好的地方。
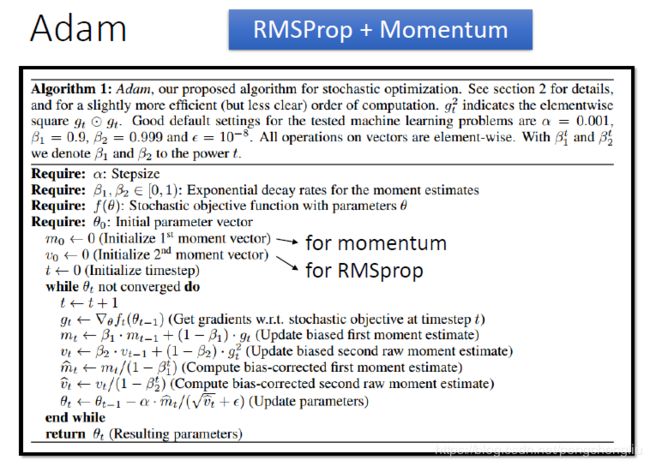
四、Adam 如果,今天把RMSProp加上Momentum的话,你就得到Adam。看着这个很复杂,但是很多人实现了。 m0就是前一个时间点的momentum。v0就是RMSProp里面的sigma。就是之前的Root Mean Square。 首先算一下gradient gt。根据gt就可以算出新的mt,也就是现在要走的方向。然后再算一下,要放在分母的vt。然后多加了一步,就是做了bias-corrected,至于为什么这么做,可以看paper。最后再更新。 其实不太懂,不过没关系,反正都是用工具,输一条命令而已。
|