图像修复之Exemplar-Based Inpainting
原理参考 https://blog.csdn.net/frank_xu_0818/article/details/18842729
代码参考 https://github.com/sooham/inpainting
- 本文简单解读下 Criminisi 等人论文"Region Filling and Object Removal by Exemplar-Based Inpainting.2004,TIP"中的基于纹理合成的图像补全方法
- 该方法结合了"texture synthesis"(通过纹理样图生成大图[1])与"inpainting"(基于微分方程填充图像中的细缝[2]),很好地实现了大的目标物体的移除.
- 将图像分为已知区域(source region)和待填充或移除区域(target region),移除从target region的边界开始,以边界点p为中心,设置块的大小,形成块(图b),然后在已知区域中根据匹配准则找到相似的块,如图c以q’及q"为中心的两个块,最后选取最佳匹配的块进行填充(图d).
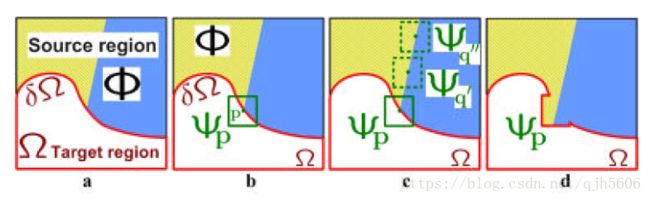
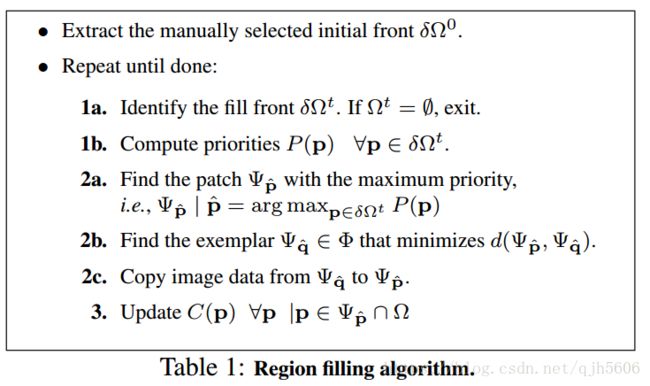
算法主要由计算优先级,搜索及复制三个部分组成:
1)优先级决定了移除顺序,保证图像中的线性结构传播,目标边界连通;
2)搜索即根据纹理相似距离(平方差距离和SSD)在已知区域中找到最佳匹配块;
3)复制即将最佳匹配块复制到对应的目标区域位置
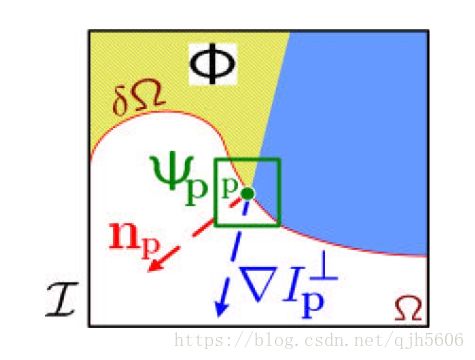
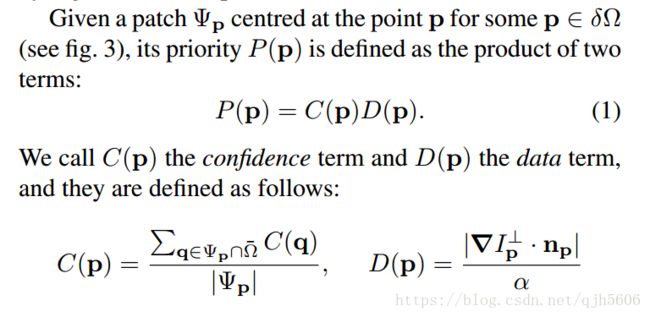
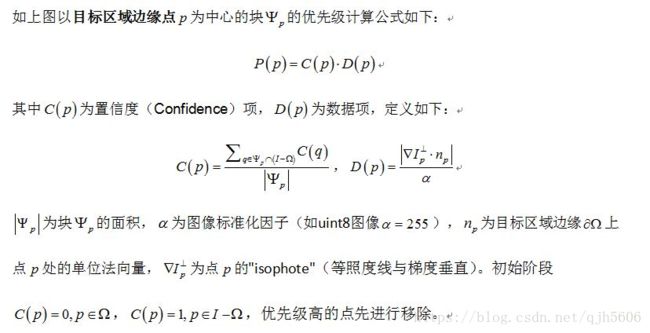
优先级计算
代码实现:
// 主函数
int main(int argc, char** argv) {
// --------------- read filename strings ------------------
std::string colorFilename, maskFilename;
if (argc == 3) {
colorFilename = argv[1];
maskFilename = argv[2];
} else {
std::cerr << "Usage: ./inpainting colorImageFile maskImageFile" << std::endl;
return -1;
}
// ---------------- read the images ------------------------
// colorMat - color picture + border
// maskMat - mask picture + border
// grayMat - gray picture + border
cv::Mat colorMat, maskMat, grayMat;
loadInpaintingImages(
colorFilename,
maskFilename,
colorMat,
maskMat,
grayMat
);
// confidenceMat - confidence picture + border
cv::Mat confidenceMat;
maskMat.convertTo(confidenceMat, CV_32F);
confidenceMat /= 255.0f;
// add borders around maskMat and confidenceMat
cv::copyMakeBorder(maskMat, maskMat,
RADIUS, RADIUS, RADIUS, RADIUS,
cv::BORDER_CONSTANT, 255);
cv::copyMakeBorder(confidenceMat, confidenceMat,
RADIUS, RADIUS, RADIUS, RADIUS,
cv::BORDER_CONSTANT, 0.0001f);
// ---------------- start the algorithm -----------------
contours_t contours; // mask contours
hierarchy_t hierarchy; // contours hierarchy
// priorityMat - priority values for all contour points + border
cv::Mat priorityMat(
confidenceMat.size(),
CV_32FC1
); // priority value matrix for each contour point
assert(
colorMat.size() == grayMat.size() &&
colorMat.size() == confidenceMat.size() &&
colorMat.size() == maskMat.size()
);
cv::Point psiHatP; // psiHatP - point of highest confidence
cv::Mat psiHatPColor; // color patch around psiHatP
cv::Mat psiHatPConfidence; // confidence patch around psiHatP
double confidence; // confidence of psiHatPConfidence
cv::Point psiHatQ; // psiHatQ - point of closest patch
cv::Mat result; // holds result from template matching
cv::Mat erodedMask; // eroded mask
cv::Mat templateMask; // mask for template match (3 channel)
// eroded mask is used to ensure that psiHatQ is not overlapping with target
cv::erode(maskMat, erodedMask, cv::Mat(), cv::Point(-1, -1), RADIUS);
cv::Mat drawMat;
// main loop
const size_t area = maskMat.total();
while (cv::countNonZero(maskMat) != area) // end when target is filled
{
// set priority matrix to -.1, lower than 0 so that border area is never selected
priorityMat.setTo(-0.1f);
// get the contours of mask
getContours((maskMat == 0), contours, hierarchy);
if (DEBUG) {
drawMat = colorMat.clone();
}
// compute the priority for all contour points
computePriority(contours, grayMat, confidenceMat, priorityMat);
// get the patch with the greatest priority 知道
cv::minMaxLoc(priorityMat, NULL, NULL, NULL, &psiHatP);
psiHatPColor = getPatch(colorMat, psiHatP);
psiHatPConfidence = getPatch(confidenceMat, psiHatP);
cv::Mat confInv = (psiHatPConfidence != 0.0f);
confInv.convertTo(confInv, CV_32F);
confInv /= 255.0f;
// get the patch in source with least distance to psiHatPColor wrt source of psiHatP
cv::Mat mergeArrays[3] = {confInv, confInv, confInv};
cv::merge(mergeArrays, 3, templateMask);
result = computeSSD(psiHatPColor, colorMat, templateMask);
// set all target regions to 1.1, which is over the maximum value possilbe
// from SSD
result.setTo(1.1f, erodedMask == 0);
// get minimum point of SSD between psiHatPColor and colorMat
cv::minMaxLoc(result, NULL, NULL, &psiHatQ);
assert(psiHatQ != psiHatP);
if (DEBUG) {
cv::rectangle(drawMat, psiHatP - cv::Point(RADIUS, RADIUS), psiHatP + cv::Point(RADIUS+1, RADIUS+1), cv::Scalar(255, 0, 0));
cv::rectangle(drawMat, psiHatQ - cv::Point(RADIUS, RADIUS), psiHatQ + cv::Point(RADIUS+1, RADIUS+1), cv::Scalar(0, 0, 255));
showMat("red - psiHatQ", drawMat);
}
// updates
// copy from psiHatQ to psiHatP for each colorspace
transferPatch(psiHatQ, psiHatP, grayMat, (maskMat == 0));
transferPatch(psiHatQ, psiHatP, colorMat, (maskMat == 0));
// fill in confidenceMat with confidences C(pixel) = C(psiHatP)
confidence = computeConfidence(psiHatPConfidence);
assert(0 <= confidence && confidence <= 1.0f);
// update confidence
psiHatPConfidence.setTo(confidence, (psiHatPConfidence == 0.0f));
// update maskMat
maskMat = (confidenceMat != 0.0f);
}
showMat("final result", colorMat, 0);
return 0;
}