Pixhawk在MP上的校准
一 机架类型
(1)连接飞控
(2)初始设置-机架类型
(3)选择下面对应机型即可如图中红圈,另外,加载参数项不要加载(暂时不清楚参数代表的意义)
总结:加载参数后会与自己设置的飞行模式等有冲突,网上论坛中有提到PIXHAWK的蜂鸣器接电后一直滴滴滴滴滴响,黄灯闪,原因是动了初始设置里旋翼类型的参数。解决方法是连接终端,setup 然后reset ,重新初始化,所有问题解决。

二 校准加速度计
飞控箭头为正向,即箭头左为左,箭头右为右。在机体上校准比较好(装在机架上时候的水平状态才是真正的水平,这时候校正的水平才是最准确)
建议:在机架上校正,一定要把飞行器放在很平的地面上进行,保证校正时候的水平状态的精确度
(1)连接地面站(飞控自检完成后)
(2)点初始设置-可选硬件-校准加速度计
(3)开始校准加速度计,按照MP上的提示,飞控的每个面都会校准,位置放好后千万不要动,以免校准失败,点击完成时点击选型,进行下一个面的校准,最后校准成功会提示加速度计校准成功,否则提示失败(中间过程中若提示加速度没有计算,最后应该都会失败,放好后不要动)
(4)校正完后下面有一个水平校正,点击进行,一般不会有问题
总结:加速度计的校准应该比较简单,自己校准过程中一直出现失败,可能是代码原因(v3.2.1,V3.3.3校准很容易成功,V3.4一直失败),不要用master版本进行校准。
三 罗盘校准
Pixhawk支持双罗盘(内外置)
(1)连接飞控
(2)初始设置-必要硬件-罗盘
(3)如上图,选择pixhawk/PX4(对应自己的飞控),勾选Automatical learn,准备好后点击现场校准
(4)进行校准。
方法:每个面绕其中心轴旋转360度,让每个白点都被经过,在旋转了Automatical learn后,信息采集完后会自动弹出显示采集到三轴的信息,否则到白点消失后收到选择done(校准前就选择Automatical learn),校准过程中注意千万不要碰到usb线,以免断开飞控
(5)校准完后,界面会有新的三轴的值,绿色值表示正常。
注意事项
(1)校正后罗盘X、Y、Z三个值的开平方根(X^2 + Y^2 + Z^2)如果大于500表示罗盘被干扰了,这时候需要重新再校正一次。校正后还是大于500的话需要检查飞控是否存在干扰源。校正不好强行飞行的话存在极大的隐患。
(2)在室内会做校正罗盘时候,室内设备会对地磁产生干扰影响罗盘精度,所以建议在室外做一次。
(3)APM内置的罗盘很容易受到飞控内电子元件干扰,还有电池、接收机等其它的干扰,如果用外置的罗盘的话精度会增加不少。
(4)在飞行器重新布线、升级固件、添加或者换设备时候,建议重新做一次校正罗盘。
(5)炸鸡有很多是由于罗盘被干扰引起的,一定要非常重视罗盘的工作环境。
总结:校准过程中,旋转时经常容易碰到USb线导致飞控断开,开始usb插的是集成小板上的usb口,超容易断开,还是建议插飞控侧边的usb口。校准过程还比较简单,每个面绕中心轴旋转即可。暂时也没遇到其他问题。


四 遥控器校准
遥控器通道配置
通道1:roll(横滚)
通道2:pitch(俯仰)
通道3:throttle(油门)
通道4:yaw(偏航)
通道5:飞行模式(辅助通道,具体可见遥控器辅助通道及失控保护)
美国手:左手油门(遥控器系统设置中的摇杆模式为2)
日本手:右手油门
(1)连接地面站(飞控自检完成后)
(2)卸载螺旋桨,初始设置-可选硬件-遥控器校准(RadioCalibration)
(3)打开遥控器,确认已接上接收机(具体见s500接线)
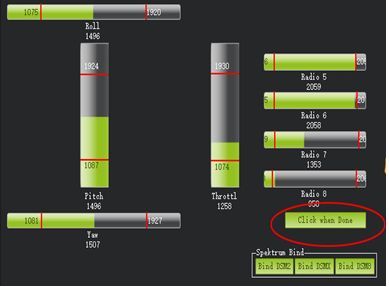
(4)来回拨动遥控器的开关,使每个档位分别到达其最大和最小,MP遥控通道上红色线条的显示,让地面站记录其最大行程和最小行程。
(这里要保证油门上推,代表油门的绿色条也向上,roll和Yaw也是,pitch相反,如果不是,可在遥控器的舵机相位中修改正反相)
(5)点击完成,会出现各通道值
(6)观测遥控器行程,最小值小于1100,最大值大于1900,则遥控器正常。
注意事项
1、如果摇动遥控器控制杆时候校正条没反应,需要重新检查:(1)接收机是否已经连接到飞控,接线是否有错。(2)遥控器与接收机是否对好码。
2、如果控制杆的通道与校正条不一致的时候(如摇动油门杆时候Pitch的校正条变化),请设置遥控器的左右手模式。
3、校正时候一定要注意遥控器控制杆摇动的方向与校正条的方向是否正确,如果不一致的话,需要调整遥控器舵机的相位,否则就算是校正好遥控器,也可能不能解锁,或者飞行器起飞就立即倾覆。
例如用乐迪AT9遥控器校正的时候发现,油门的方向与校正条相反,油门杆向上时候校正条反而向下。进入AT9的菜单,找到“舵机相位”,选择油门,设置为反相就可以了。
4、第五通道(辅助通道)用于切换飞行模式,也需要校正第五通道,但每个遥控器设置第五通道用于飞行模式都有差别(具体见乐迪遥控器辅助通道及失控保护)
总结:
刚开始组装校准后解锁不成功发现这里的电机输出没有,理论上校准应该是有的,觉得是遥控器校准没有成功。后面试了几次,并且这里的电机输出项也有了,解锁后电机的绿色条也会有相应输出。因此出现此问题可重新校准遥控器试试(前提是你的接收机接线没问题)。


五 电调校准
即油门行程校准,最好看说明书。校准前确保卸载螺旋桨
XRotor电调
Pixhawk油门行程校准操作方法:
A:开启遥控器,油门推至最高
B:电池接通,飞控板上的led等红,蓝,黄循环闪时拔掉电池
C:再插上电池,等飞控一声长哔后(过程中油门保持高位不要动),按下安全开关(按长点,安全开关等会从闪变为常亮),听到哔,哔两声后,马上把油门拉下到最低,等一秒后会有哔一声,再就没有声音了。推油门电机转动,校准油门成功,拔掉电池,让飞控记住油门行程。
常见故障及提示音:
哔哔哔的急促单音:
原因:油门未归0或行程设置过小
解决:油门打到最低或重新校准油门行程
哔,哔,哔(间隔1s):
原因:接收机油门通道无油门信号输出
解决:检查发射机与接收机配合是否正常,油门控制通道接线是否正常
哔哔,哔哔哔,哔哔哔哔循环叫:
原因:油门通道正反向错误
解决:调整油门通道正反向设置。
总结:电调校准遇到的问题就一个,校准完毕后电机转动,拔掉电池再插上,过一会飞控就一直双闪黄灯,滴滴滴滴滴叫个不停。尝试了很多次重新校准一直这样,根据指示灯含义,黄灯闪是错误,拒绝解锁,遥控故障保护和电池故障保护。
试验一:重新刷代码,重新校准,依然(排除代码原因)
试验二:多次重新校准,依然(排除校准不成功原因)
试验三:关掉遥控器的失控保护,全部Nor,依然(排除遥控器失控保护)
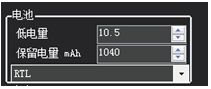
实验四:MP故障保护中设置电池低电量报警设置
重新校准成功(不是很确定是否这个原因,可以一试)
再看蜂鸣器状态排查中提到的电池故障,黄色led闪,急促短音,应该就是这个(可能是电池保护设置问题,重新充电再试,具体在学习)