Pyramid Scene Parsing Network
论文地址:https://arxiv.org/pdf/1612.01105.pdf
源码地址:https://github.com/hszhao/PSPNet
来自:Semantic Segmentation–Pyramid Scene Parsing Network(PSPNet)论文解读
《Pyramid Scene Parsing Network》论文笔记
What: PsPNet主要是通过金字塔池化提取多尺度信息。按论文的描述:更好的提取全局上下文信息,同时利用局部和全局信息,使得场景识别更加可靠。(从技术的角度来说,我觉得就是从不同的视野去寻找特征,类似放大镜放大,放大倍数大,视野小,物体清楚,但是看不清物体之间的关系;放大倍数小,视野大,物体模糊,但是可以看清楚物体之间的关系。)除此之外,文章还通过Ablation study (类似控制变量法,移除一个结构,研究这个结构的影响)研究金字塔多尺度池化,池化的方式,辅助损失函数,预训练模型的作用。
Why: PsPNet提出的原因,可以总结为一句话:获取全局环境信息,利用全局信息和局部信息获得更加可靠地结果。怎么做到的?提取多尺度信息。为什么提取多尺度信息可以获取全局环境信息?经验总结。
Abstract
本文提出的金字塔池化模块( pyramid pooling module)能够聚合不同区域的上下文信息,从而提高获取全局信息的能力。实验表明这样的先验表示(即指代PSP这个结构)是有效的,在多个数据集上展现了优良的效果。
Introduction
场景解析(Scene Parsing)的难度与场景的标签密切相关。先大多数先进的场景解析框架大多数基于FCN,但FCN存在的几个问题:
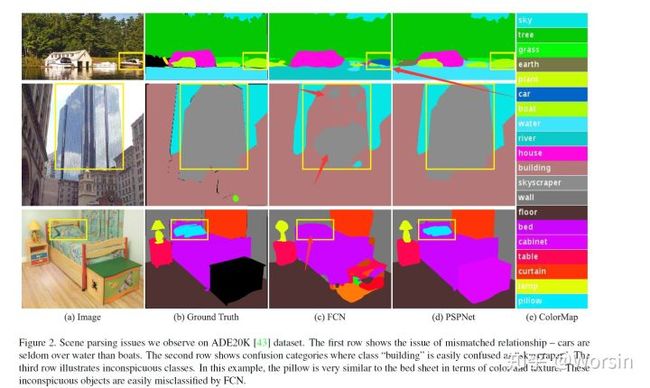
Mismatched Relationship: 上下文关系匹配对理解复杂场景很重要,例如在上图第一行,在水面上的大很可能是“boat”,而不是“car”。虽然“boat和“car”很像。FCN缺乏依据上下文推断的能力。
Confusion Categories: 许多标签之间存在关联,可以通过标签之间的关系弥补。上图第二行,把摩天大厦的一部分识别为建筑物,这应该只是其中一个,而不是二者。这可以通过类别之间的关系弥补。
Inconspicuous Classes: 模型可能会忽略小的东西,而大的东西可能会超过FCN接收范围,从而导致不连续的预测。如上图第三行,枕头与被子材质一致,被识别成到一起了。为了提高不显眼东西的分割效果,应该注重小面积物体。
总结这些情况,许多问题出在FCN不能有效的处理场景之间的关系和全局信息。本论文提出了能够获取全局场景的深度网络PSPNet,能够融合合适的全局特征,将局部和全局信息融合到一起。并提出了一个适度监督损失的优化策略,在多个数据集上表现优异。
本文的主要贡献如下:
提出了一个金字塔场景解析网络,能够将难解析的场景信息特征嵌入基于FCN预测框架中
在基于深度监督损失ResNet上制定有效的优化策略
构建了一个实用的系统,用于场景解析和语义分割,并包含了实施细节
Related Work
受到深度神经网络的驱动,场景解析和语义分割获得了极大的进展。例如FCN、ENet等工作。许多深度卷积神经网络为了扩大高层feature的感受野,常用dilated convolution(空洞卷积)、coarse-to-fine structure等方法。本文基于先前的工作,选择的baseline是带dilated network的FCN。
大多数语义分割模型的工作基于两个方面:
一方面:具有多尺度的特征融合,高层特征具有强的语义信息,底层特征包含更多的细节。
另一方面:基于结构预测。例如使用CRF(条件随机场)做后端细化分割结果。
为了充分的利用全局特征层次先验知识来进行不同场景理解,本文提出的PSP模块能够聚合不同区域的上下文从而达到获取全局上下文的目的。
Architecture
Pyramid Pooling Module
前面也说到了,本文的一大贡献就是PSP模块。
在一般CNN中感受野可以粗略的认为是使用上下文信息的大小,论文指出在许多网络中没有充分的获取全局信息,所以效果不好。要解决这一问题,常用的方法是:
用全局平均池化处理。但这在某些数据集上,可能会失去空间关系并导致模糊。
由金字塔池化产生不同层次的特征最后被平滑的连接成一个FC层做分类。这样可以去除CNN固定大小的图像分类约束,减少不同区域之间的信息损失。
论文提出了一个具有层次全局优先级,包含不同子区域之间的不同尺度的信息,称之为pyramid pooling module。
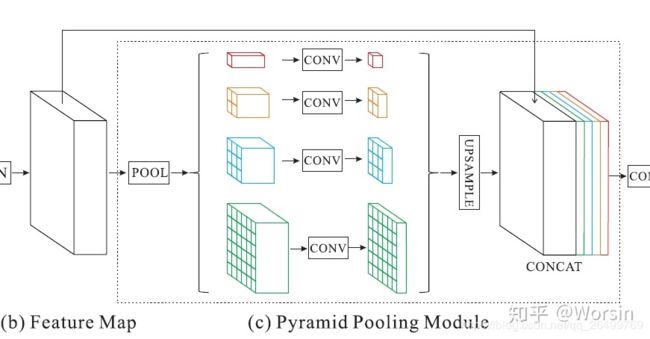
该模块融合了4种不同金字塔尺度的特征,第一行红色是最粗糙的特征–全局池化生成单个bin输出,后面三行是不同尺度的池化特征。为了保证全局特征的权重,如果金字塔共有N个级别,则在每个级别后使用1×1的卷积将对于级别通道降为原本的1/N。再通过双线性插值获得未池化前的大小,最终concat到一起。
金字塔等级的池化核大小是可以设定的,这与送到金字塔的输入有关。论文中使用的4个等级,核大小分别为1×1,2×2,3×3,6×6。
整体架构
在PSP模块的基础上,PSPNet的整体架构如下:
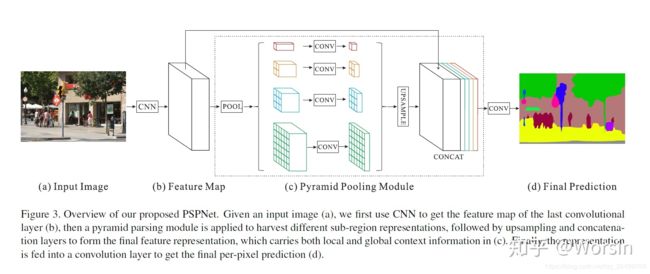
基础层经过预训练的模型(ResNet101)和空洞卷积策略提取feature map,提取后的feature map是输入的1/8大小
feature map经过Pyramid Pooling Module得到融合的带有整体信息的feature,在上采样与池化前的feature map相concat
最后过一个卷积层得到最终输出
PSPNet本身提供了一个全局上下文的先验(即指代Pyramid Pooling Module这个结构),后面的实验会验证这一结构的有效性。
基于ResNet的深度监督网络
论文用了一个很“玄学”的方法搞了一个基础网络层,如下图:

Experiment
论文在ImageNet scene parsing challenge 2016, PASCAL VOC 2012,Cityscapes 三个数据集上做了实验。
训练细节:

Conclusion
论文在结构上提供了一个pyramid pooling module,在不同层次上融合feature,达到语义和细节的融合。 模型的性能表现很大,但感觉主要归功于一个良好的特征提取层。在实验部分讲了很多训练细节,但还是很难复现,这里值得好好推敲一下。